

7. Практическое занятие №3 регулирующие органы
Как следует из определения, РО служат для управления подводом либо отводом вещества или энергии ОР в целях изменения значения регулируемого параметра. По роду протекающего вещества или энергии РО делят на пневматические, гидравлические и электрические. По конструктивному исполнению пневматические и гидравлические РО делят на клапанные (одно- и двухседельные), поворотные заслонки и золотниковые.
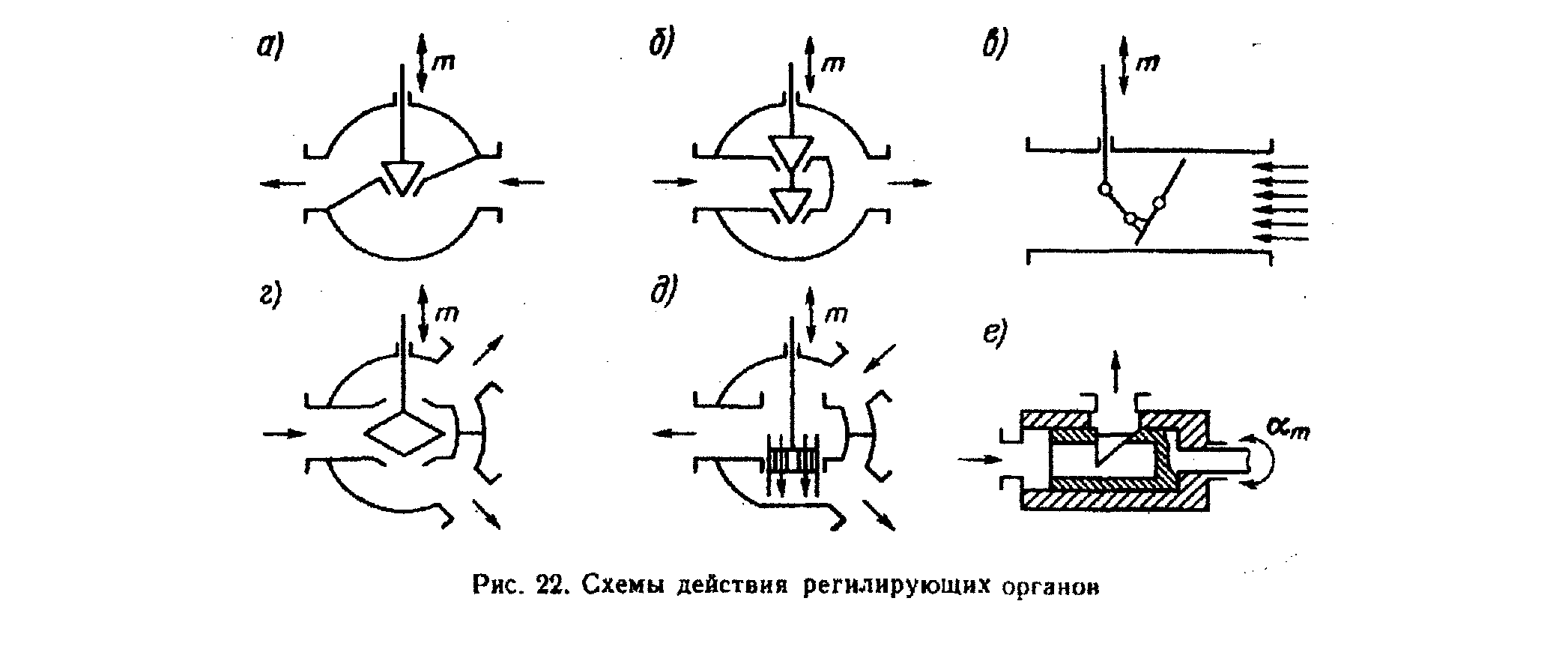
Рис. 21. Схемы действий регулирующих органов
Односедельные клапаны (рис. 21, а) просты по конструкции, однако не уравновешены из-за одностороннего действия протекающей среды, поэтому их используют только при малых перепадах давлений и малых условных проходных сечениях трубопроводов.
Двухседельные клапаны (рис. 21, б) сложнее по конструкции, однако свободны от недостатка, присущего односедельным клапанам, поэтому их широко применяют при больших проходных сечениях и перепадах давлений.
Поворотные заслонки (рис. 21, в) удобны при регулировании больших расходов жидких и газообразных сред при малых перепадах давлений.
Трехходовые клапаны (рис. 21, г) и золотниковые (рис. 21, д) применяют для перераспределения потоков жидкостей в системах терморегулирования. Золотниковые РО являются уравновешенными и в закрытом положении обладают незначительными протечками. Однако наличие больших сил трения между золотником и втулкой требует большого перестановочного усилия в случае их заедания; кроме того, свойственный им повышенный износ приводит к увеличению протечек.
Золотниковые РО (см. рис. 21, е) широко распространены при регулировании подачи топлива в паровых котлах и ДВС.
В зависимости от характера управления РО должен обеспечивать подачу рабочей среды периодически по принципу открыто - закрыто или непрерывно с плавным регулированием расхода. Входной координатой РО служит перемещение т штока или разворот αm золотника (заслонки), вследствие чего меняются его проходное сечение f и расход W рабочей среды, являющийся выходной координатой. Расход среды через проходное сечение можно определить по перепаду давлений Δр = р1 —р2 на участке сопротивления (клапане, дроссельной шайбе или участке трубопровода), где р1, р2 — давление среды до и после участка сопротивления.
При установившемся режиме зависимость расхода Wo от входной координаты m0 описывается расходной характеристикой Wo = f (m0). При проектировании расходную характеристику РО с плавным регулированием стремятся получить линейной специальным подбором профилей проточной части. В эксплуатации для сохранения линейности, необходимо поддерживать на РО постоянный перепад давлений Δр.
Электрическими РО являются контакты электромагнитных реле и пускателей либо полупроводниковые элементы (транзисторы или тринисторы).
8. Практическое занятие №4 регулятор частоты вращения двигателя орн-30
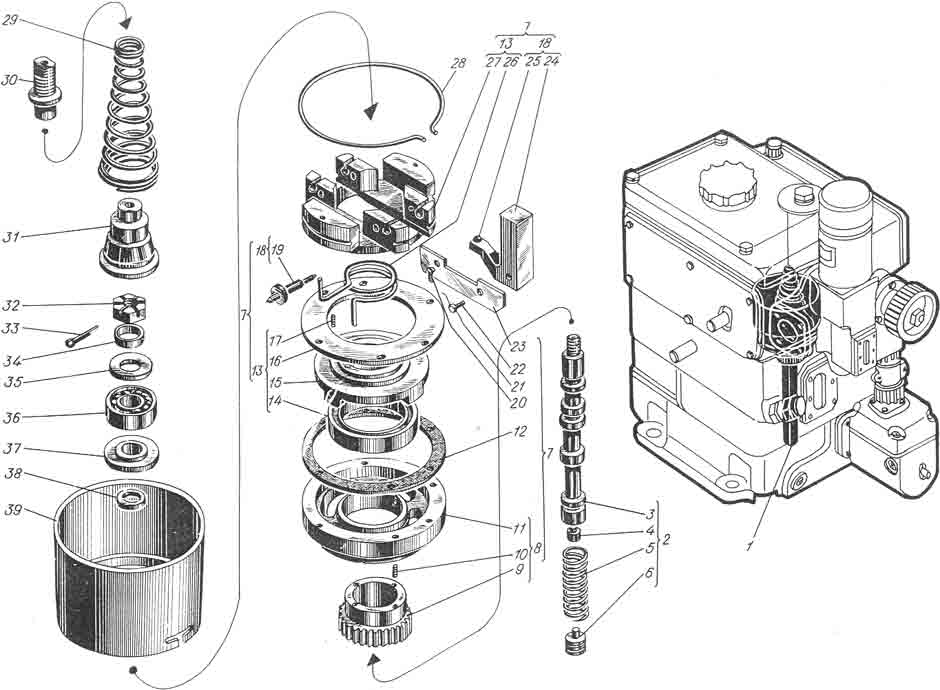
Рис. 22. Р егулятор частоты вращения двигателя ОР-30
|
|
Однорежимный регулятор ОРН-ЗО
Регулятор (рис. 23), устанавливаемый на ДГ, имеет схему включения в работу, структуру и принцип действия, аналогичные регулятору «Вудвард», и некоторые конструктивные особенности. От шлицевого вала 21 регулятора приводится в действие непосредственно масляный шестеренный насос 20, а через пружинный демпфер, вмонтированный в ступицу шестерни 18, — основание 17 с грузами датчика и золотник 16 управляющего устройства. Вращение золотника во втулке УУ позволяет постоянно сохранять между ними поверхностную масляную пленку и исключить сухое трение, т.е. повысить чувствительность регулятора. В некоторых модификациях регуляторов применяют пружинно-гидравлический демпфер, устанавливаемый в основании 17. Уставку задания регулятора изменяют вращением маховика 1 с местного поста управления либо дистанционно с ГРЩ через электродвигатель 2, Вращение через редуктор передается входному валу 3 и рычагу ABC. через который устанавливается предварительное натяжение конической пружины датчика. Золотник УУ имеет поля 15 и 16, внутренние кромки которых управляют сливом и подачей масла под поршень исполнительного механизма 10 (большего диаметра). Поршень 8 (меньшего диаметра) постоянно находится иод давлением масла от насоса 20 и аккумулятора 19. Между собой поршни соединены плавающим сухарем, движение которого передается на выходной вал 7, а также на механизмы ЖОС и ИОС.
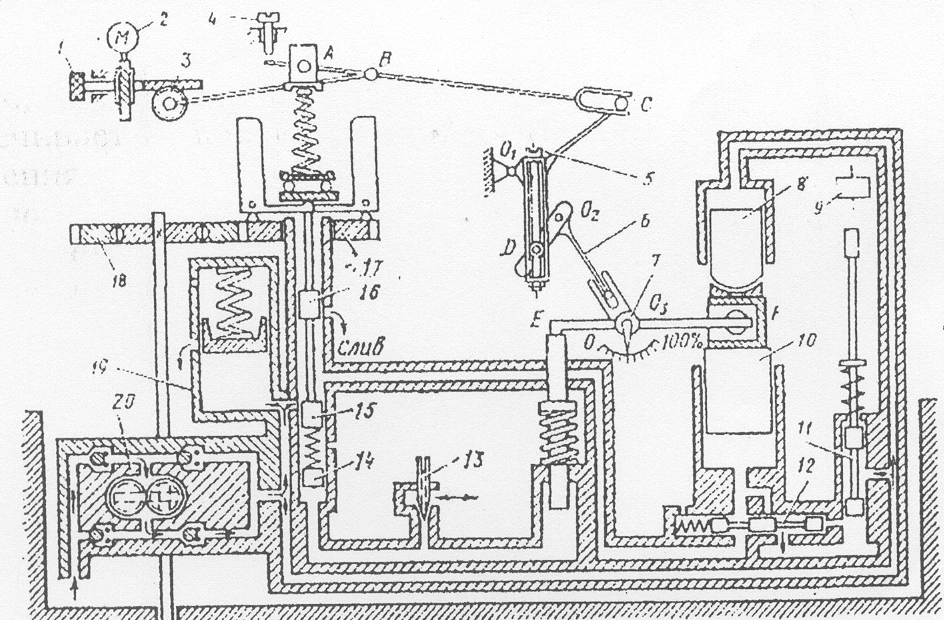
Рис.23. Регулятор ОРН 30
Особенностью отрицательной ИОС является то, что приемный поршень 14 соединен с управляющим золотником пружиной, работающей как на сжатие, так и на растяжение. Механизм силовой отрицатель ной ЖОС обеспечивает изменение статической неравномерности от О до 6 % путем изменения соотношения плеч рычагов CO1D и DO2.. Уставку неравномерности регулируют вращением винта 5, по которому перемещается сухарь D. Нулевая неравномерность обеспечивается совмещением сухаря D с осью О2 рычага 6.
Принцип действия данного регулятора и регулятора UG8 аналогичен. Качество переходного процесса АСР регулируют изменением действия ЖОС (винтом 5) и времени изодрома (иглой 13) . Уставка задания минимальной частоты вращения ограничивается винтом 4.
В регулятор вмонтировано дополнительное стоп-устройство, позволяющее дистанционно (вручную или по сигналу от автоматической защиты) останавливать двигатель через регулятор. При подаче электропитания в катушку соленоида 9 золотник 11 смещается вниз, а золотник 12 — влево. Это приводит к закрытию магистрали от золотника 15 и открытию сливного канала из рабочей полости поршня 10, который под действием поршня 8 смещается вниз. В результате происходит разворот выходного вала и смещение тяги ТНВД на нулевую подачу топлива.
Регулятор ОРН-30 обладает сравнительно малой работоспособностью (2,94 Н-м), поэтому в условиях эксплуатации необходимо следить за отсутствием «заеданий» тяг управления ТНВД. В противном случае возможно раскачивание АСР в динамике из-за повышенной нечувствительности, а при чрезмерном изменении частоты вращения — срабатывание автоматической защиты.