

97. Способы регулирования скорости вращения ад.
АД обычно применяются для электроприводов, которые работают с постоянной частотой вращения. Но иногда они применяются для регулируемых электроприводов.
1.
Для
регулирования частоты вращения
асинхронного двигателя используется
реостат в цепи ротора, имеющего обмотку,
присоединенную к контактным кольцам.
Увеличение активного сопротивления
цепи ротора приводит к увеличению
скольжения и, к уменьшению частоты
вращения двигателя, что видно из кривых
M
=
f
(
s
)
при различных
 .
Здесь приМ’ст=const
(соответствует работе электропривода
с подъемным краном) точки пересечения
кривойМ’ст==
f
(
s
)
с указанными кривыми определяют
скольжения. Регулирование возможно в
широких пределах, плавность регулирования
зависит от числа ступеней реостата.
.
Здесь приМ’ст=const
(соответствует работе электропривода
с подъемным краном) точки пересечения
кривойМ’ст==
f
(
s
)
с указанными кривыми определяют
скольжения. Регулирование возможно в
широких пределах, плавность регулирования
зависит от числа ступеней реостата.
Указанный
способ регулирования неэкономичен, так
как он связан с непроизводительной
затратой энергии в реостате.
![]()
О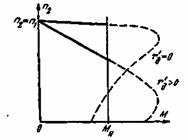 тсюда
видно, что увеличение скольжения s
при
М
=
const приводит к увеличению электрических
потерь в роторной цепи. Если, например,
s
увеличивается
при М
=
const вследствие введения в роторную цепь
сопротивления
тсюда
видно, что увеличение скольжения s
при
М
=
const приводит к увеличению электрических
потерь в роторной цепи. Если, например,
s
увеличивается
при М
=
const вследствие введения в роторную цепь
сопротивления от 0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
от 0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
При регулировании частоты вращения двигателя при помощи реостата в цепи ротора следует иметь в виду, что его механическая характеристика может получиться резко падающей, недопустимой для электропривода к токарному станку.
Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения для рассеяния тепла, образующегося в реостате.
2.
Частоту
вращения асинхронного двигателя можно
регулировать также путем изменения
напряжения U1
на зажимах статора. Однако такой способ
регулирования при малом сопротивлении
роторной цепи позволяет изменять частоту
вращения лишь в небольших пределах, где
сплошные кривые представляют собой
зависимости M
=
f
(
s
)при
различных напряжениях U1
и при rд
= 0. 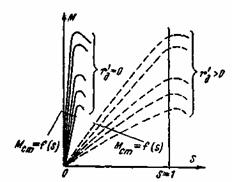
Можно
расширить пределы регулирования путем
изменения U
1
, включив в роторную цепь добавочное
сопротивление![]() .
.
3.
В
относительно редких случаях регулирование
частоты вращения осуществляется путем
изменения частоты f
1
, тока, подводимого к двигателю. При этом
изменяется частота вращения поля![]() и ротора. Такой способ регулирования
требует наличия отдельного генератора
переменного тока с регулируемым первичным
двигателем.
и ротора. Такой способ регулирования
требует наличия отдельного генератора
переменного тока с регулируемым первичным
двигателем.
4. На практике применяется также способ ступенчатого изменения частоты вращения путем изменения числа пар полюсов обмотки статора. Соответствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно.
При обмотке статора, переключаемой на различные числа пар полюсов, применяется КЗР с беличьей клеткой. Если ротор выполняется с контактными кольцами, то его обмотка также должна переключаться на те же числа пар полюсов, что требует устройства большого количества контактных колец и удорожает двигатель.
Д ля
получения большего числа ступеней
скорости на статоре помещают обычно
две обмотки, причем одна или каждая из
них делается переключаемой на числа
пар полюсов в отношении 2 : 1. В этом случае
можно получить три или четыре ступени
скорости, например: 3000 : 1500 : 1000 или 3000 :
1 500 : 1 000 : 500 об/мин.
ля
получения большего числа ступеней
скорости на статоре помещают обычно
две обмотки, причем одна или каждая из
них делается переключаемой на числа
пар полюсов в отношении 2 : 1. В этом случае
можно получить три или четыре ступени
скорости, например: 3000 : 1500 : 1000 или 3000 :
1 500 : 1 000 : 500 об/мин.
Механические характеристики n 2 = f ( M ) многоскоростного двигателя для двух ступеней скорости. К недостаткам многоскоростных двигателей нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость. Другие способы регулирования частоты вращения асинхронного двигателя здесь не рассматриваются, так как они редко применяются на практике.