

Типовая функционально – технологическая схема автоматизации управления норийным маршрутом Описание типовой функционально – технологической схемы автоматизации управления норийным маршрутом:
ВА1 - вентилятор аспирации; Н-1 - нория № 1; К-1 - конвейер № 1; 1 - привод вентилятора; 1а - кнопка "Пуск" - "Стоп" по месту (Н - ручная; S - включение, отключение); 1б - магнитный пускатель привода вентилятора (N - пускатель, S - включение, отключение); 1в - кнопка "Пуск"-"Стоп" на пульте; 1г - сигнальная лампочка на пульте, 2 - привод нории; 2а - кнопка управления приводом нории; 26 - блокировочная связь с приводом конвейера; 2в - магнитный пускатель привода нории; 2г - кнопка управления на пульте; 2д - сигнальная лампочка привода нории на пульте; 3 - датчик подпора в головке нории; За - чувствительный элемент (Е) в виде мембранного датчика уровня, реагирующего на давление зерна (Р) при подпоре; 36 - блокировка на отключении нории при переключении контактов чувствительного элемента датчика; Зв - сигнальная лампочка срабатывания датчика подпора; 4, 12 - датчики уровня зерна в бункерах (4а, б, в, и 12а, б — аналогично ранее объясненным позициям); 5 - Датчик реле контроля скорости вращения барабана в башмаке нории; 6 - привод конвейера; 7 - датчик реле контроля скорости вращения вала привода конвейера; 8 - датчик "завала" (подпора) зерна в башмаке нории; 9 - исполнительный механизм перекидного клапана; 10, 11 - конечные переключатели крайних положений перекидного клапана; 13 - датчик напора для локализации взрыва.
Скелетная схема блокировок
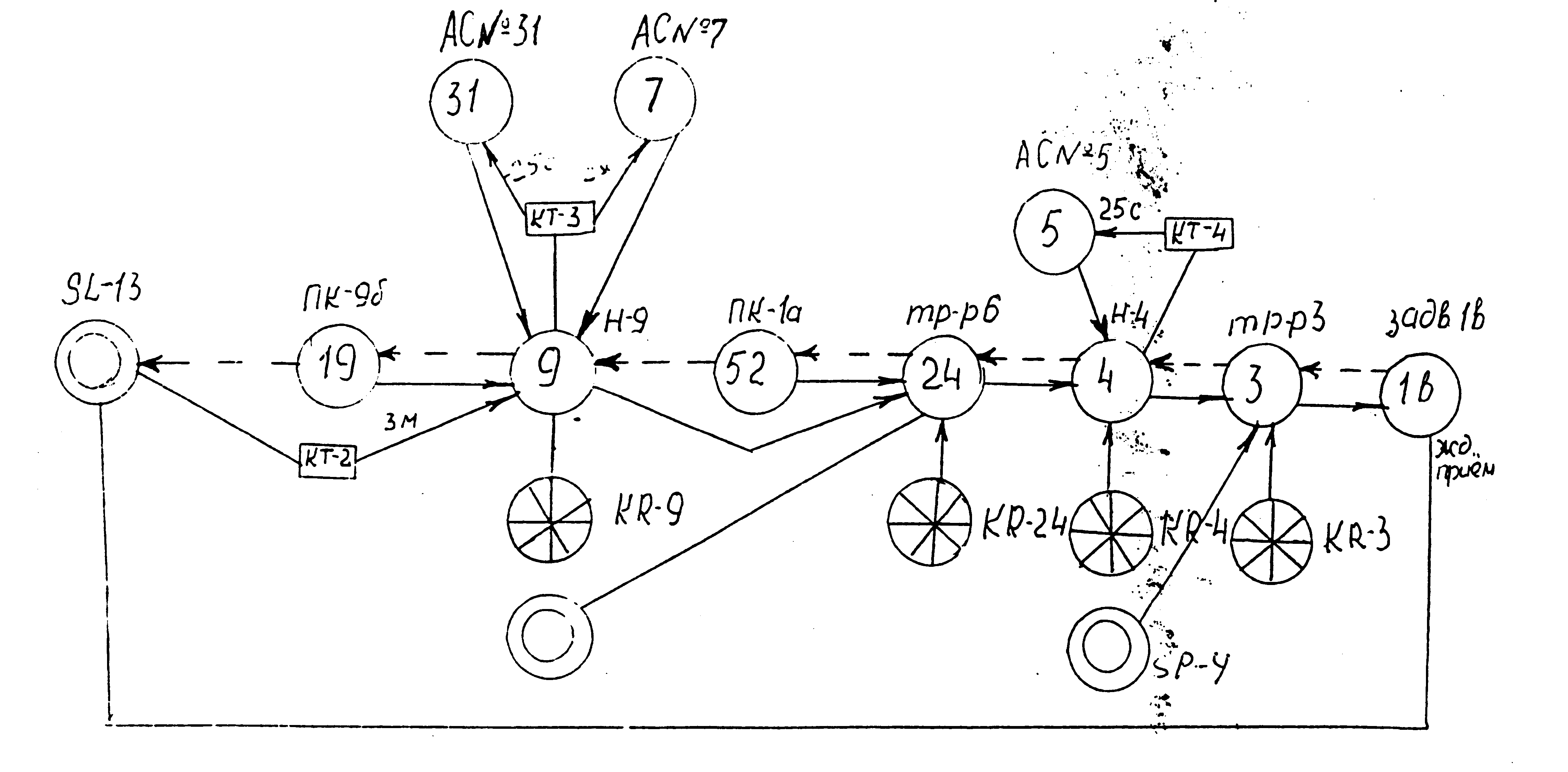
Описание скелетной схемы блокировок
Из скелетной схемы видно, что сначала нужно установить механизмы настройки в нужное положение: ПК №1а (ЭД №478) в положение «а», ПК №1а-а (ЭД №477) в положение «а», ПК сбрасывающей тележки (ЭД №319), поворотную трубу №1 (ЭД №256) настроить на надсилосный транспортер №4(ЭД№62).
Тележка будет перемещаться в заданном положении при условиях:
1. Если не работает надсилосный транспортер №4 (ЭД №62)
2. В рукавах нет подпора (18РЗ13, 28РЗ 13 в не сработанном состоянии)
3. Тележка не стоит на аварийном конечном выключателе (1SQ31ЗА, 2SQ31ЗА в не сработанном состоянии)
4. Если не заполнен хотя бы один силос (правый или левый)
Затем нужно включить вентиляторы аспирационных сетей №1 (ЭД №36), №7 (ЭД №42), №22 (ЭД №54) и машины в порядке, обратном движению продукта: транспортер №4 (ЭД №62), подвесовая задвижка (ЭД №251), нория №1 (ЭД №1), а в последнюю очередь откроется задвижка под бункером 9-10 (ЭД№295).
Нория №1 (ЭД №1) и транспортер №4 (ЭД №62) контролируются на обрыв и пробуксовку ленты с помощью реле контроля скорости. При снижении скорости вращения натяжных барабанов этих машин реле контроля скорости должно отключить привода этих машин.
Башмак нории №1 (ЭД №1) контролируется на подпор. При возникновении подпора, датчик подпора во избежании завала башмака нории №1 (ЭД №1) должен закрыть подбункерную задвижку (ЭД № 295).
При остановке нории №1 (ЭД №1) ее аспирационные сети №22 и №1 (ЭД №54 и ЭД №36) отключаются с помощью реле времени КТ-4 через 25 с. То же происходит при остановке другой аспирационной сети.
При заполнении надвесового бункера закроется подбункерная задвижка (ЭД №295) и с помощью реле времени КТ-3 через 5м отключается нория №1 (ЭД №1). При заполнении силосов 1301-2215 закрывается подвесовая задвижка (ЭД №251) и с помощью реле времени КТ-5 через 5м отключается надсилосный транспортер №4 (ЭД №62).