

Програма «Определение отметки недоступной точки»
Ця програма дозволяє визначати висоту недоступної точки за допомогою вимірів на відбивач, установлений під такою точкою (Рис.2.27).
На рисунку 2.27 1) недоступна точка; 2) перевищення; 3) похила відстань; 4) точка встановлення відбивача.
Порядок виконання такий: задаємо ідентифікатор точки [Ptid] і висоту відбивача, встановленого на ній, кнопкою [ALL] запускаємо вимір на відбивач. Далі починаємо процедури визначення невідомої висоти відбивача [hr?]. Наводимо на недоступну точку, при цьому на дисплеї висвітиться її висота. [OK] – запис результатів вимірів.
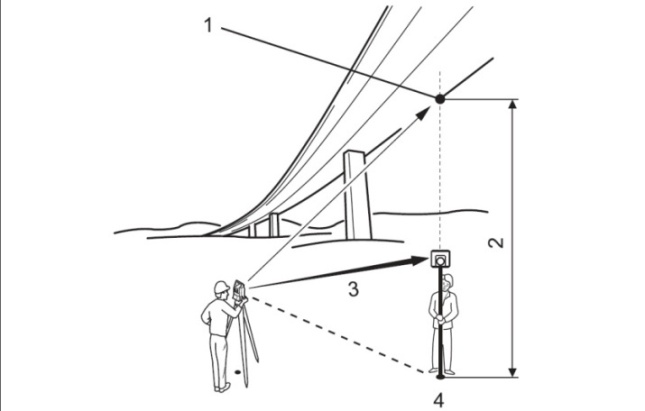
Рис. 2.27 Визначення висоти недоступної точки
Програма «cogo»
«COGO» - спеціальна програма, яка дозволяє виконувати обчислення методами координатної геометрії таких величин: координати точок, дирекційні кути напрямків між точками; відстані між точками. Основні методи «COGO» такі:
обернена задача і поперечна розбивка;
засічки;
зсуви;
продовження лінії.
Після опису станції стояння та орієнтування ГК автоматично вмикається меню COGO (Рис. 2.28), з допомогою якого вибирається задача, яку необхідно вирішити.
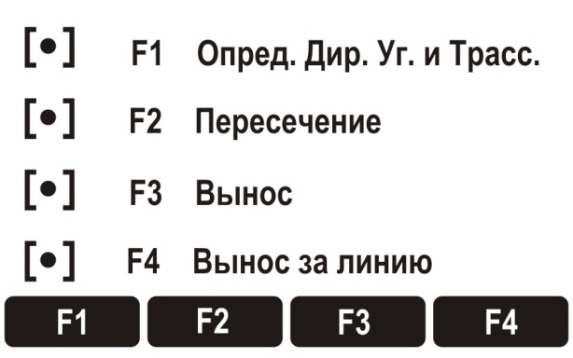
Рис. 2.28 Зовнішній вигляд на дисплеї меню COGO
Перша підпрограма [Опред. Дир. Уг. и Трасс.] має дві опції: [Обр. Здч.] та [Ход].
[Обр. Здч.] – використовується для визначення дирекційного кута, похилої віддалі, горизонтальної проекції та перевищення між двома точками (Рис. 2.29). Точки задаються з пам’яті приладу або з допомогою виміру.
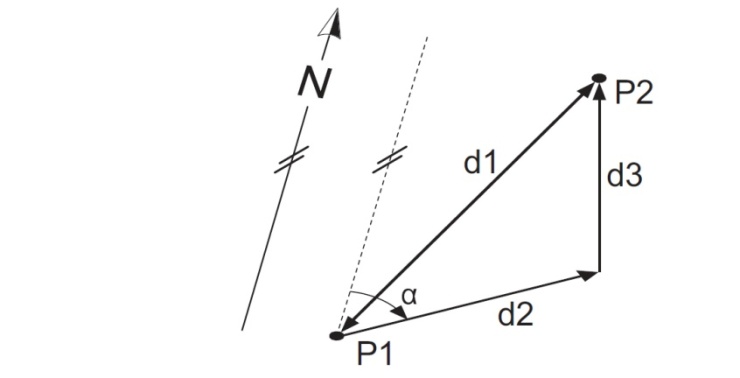
Рис. 2.29 Обернена задача
На рисунку 2.29: P1 – перша відома точка, P2 – друга відома точка. Необхідно визначити a – напрямок із точки P1 на точку P2, d1 – похила відстань між P1 і P2, d2 – горизонтальне прокладання між P1 і P2, d3 – різниця відміток точок P1 і P2
[Ход] призначена для визначення координат точки за даними дирекційним кутом, горизонтальним прокладанням та поперечними зсувами (Рис.2.30).

Рис. 2.30 Принцип роботи програми [Ход]
На рисунку 2.30: P1 - відома точка, a – напрямок з точки P1 на точку P2, d1 – відстань між точками P1 і P2 d2 - позитивний зсув (вправо), d3 – негативне зрушення (вліво). За цими даними необхідно визначити: P2 точка COGO без зміщення, P3 – точка COGO з позитивним зсувом, P4 – точка COGO з негативним зсувом.
Підпрограма [Пересечение] використовується для визначення координат точки різними типами засічок і включає такі опції: [ДУ - ДУ], [ДУ – Рст.], [Рст. - Рст], [По 4 тч]
[ДУ - ДУ] – за даними дирекційними кутами двох напрямків та двома відомими точками визначаємо координати невідомої третьої точки (Рис.2.31).
На рисунку 2.31: P1 – перша відома точка; P2 - друга відома точка; a1 – напрямок із точки P1 на точку P3, a2 – напрямок із точки P2 на точку P3. Координати точок вводимо з клавіатури або вимірюємо на місцевості, значення дирекційних кутів вводимо. Для отримання координат невідомої точки P3 натискаємо кнопку [ВЫЧ].
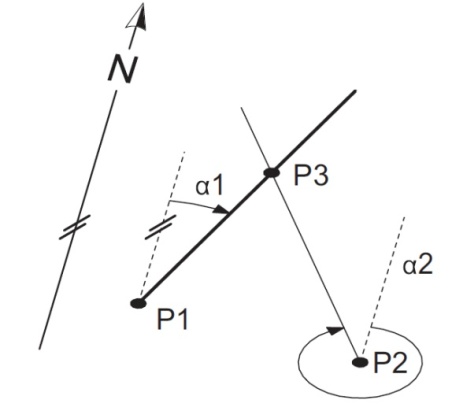
Рис. 2.31 Принцип роботи програми [ДУ - ДУ]
[ДУ – Рст.] дозволяє визначити координати точки (Рис. 2.32).

Рис. 2.32 Принцип роботи програми [ДУ – Рст.]
Вихідні дані: P1 - перша відома точка, Р2 - друга відома точка, a – дирекційний кут лінії, що проходить через точки P1, P3 і P4, r - радіус, визначений відстанню між точкою P2 і точками P4 і P3. Ввівши вихідні дані в відповідні поля, визначаємо координати точок P3 та P4.
[Рст. - Рст] – лінійна засічка, за координатами двох точок та довжинами ліній до невідомої точки визначаємо її координати (Рис.2.33).
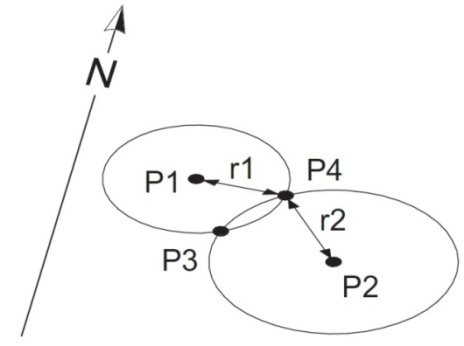
Рис. 2.34 Принцип роботи програми [ДУ – Рст.]
На
рисунку 2.34  P1
- перша відома точка; P2 - друга відома
точка; r1 – радіус, заданий відстанню
між точкою P1 і P3 або P4, r2 - радіус, заданий
відстанню між точкою P2 і P3 або P4. За цими
даними знаходимо координати точок P3
таP4.
P1
- перша відома точка; P2 - друга відома
точка; r1 – радіус, заданий відстанню
між точкою P1 і P3 або P4, r2 - радіус, заданий
відстанню між точкою P2 і P3 або P4. За цими
даними знаходимо координати точок P3
таP4.
[По 4 тч] використовується для визначення координат точки, яка знаходиться на перетині двох прямих (Рис.2.35).
На рисунку 2.34 Р1, Р2 ,Р3 ,Р4 – точки з відомими координатами, за координатами відомих точок обчислюються координати точки Р5, що знаходиться на перетині двох прямих: Р1 – Р2, Р3 – Р4.
Наступна підпрограма [Вынос] складається з таких функцій: [Лин.сдв], [ВыносТч], [Пл-сть].
Функція [Лин.сдв] дозволяє визначати лінійні зміщення точки від прямої лінії, проведеної через дві точки (Рис. 2.35).
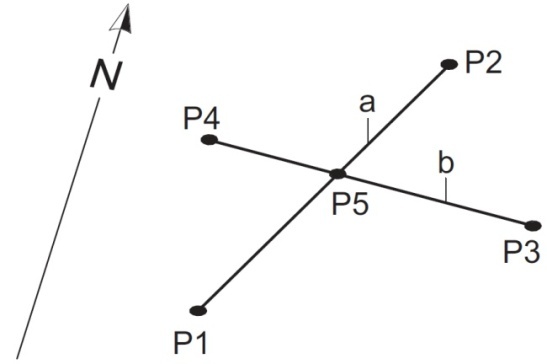
Рис. 2.34 Принцип роботи програми [ДУ – Рст.]
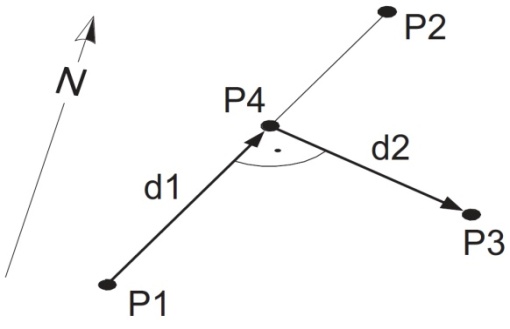
Рис. 2.35 Принцип роботи програми [Лин.сдв]
Пряма задається двома точками з відомими координатами: Р1 і Р2. Функція дозволяє визначати лінійні зміщення точки з відомими координатами Р3 (d1, d2), відносно прямої Р1 – Р2 та координати точки Р4.
[ВыносТч] – це відомий спосіб прямокутних координат для визначення координат точок (Рис.2.36).
На рисунку 2.36: пряма Р1 – Р2 задається двома точками з відомими координатами за даними поздовжнього зсуву a (в меню приладу це поле [Расст.]) та поперечного зсуву(в меню приладу це поле [Смещ.]) відносно прямої Р1 – Р2 обчислюються координати точки Р3.
[Пл-сть] використовується для визначення координат точки, зміщення відносно деякої площини (Рис. 2.36).
На рисунку 2.37 Р1, Р2, Р3 – точки з відомими координатами, що задають площину, точка Р4 – точка, зміщення якої необхідно обчислити (в меню приладу це поле [Смещ.]), d1 – величина зміщення, точка Р5 – проекція точки Р4 на площину Р1, Р2, Р3.
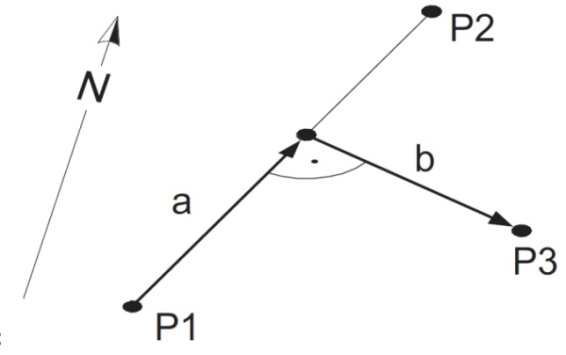
Рис. 2.36 Принцип роботи програми [ВыносТч]
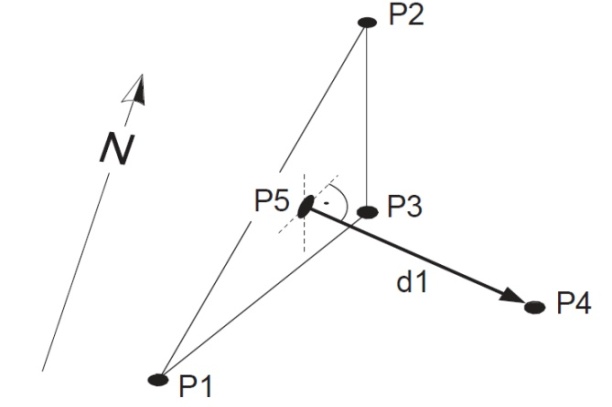
Рис. 2.37 Принцип роботи програми [ВыносТч]
Підпрограма [Вынос за линию] для розбивки заданої лінії на відрізки або для продовження її (Рис. 2.38).

Рис. 2.38 Принцип роботи програми [Вынос за линию]
На рисунку 2.38 пряма задається двома точками Р1 та Р3, за довжиною відрізків ∆L1 або ∆L2 визначаються координати точок Р2 або Р4. При цьому в приладі необхідно вказати базову точку (в меню приладу це поле [Баз.тчк]), від якої відкладається відрізок.