

Загальні методичні вказівки
Лабораторний практикум містить методичні вказівки для виконання лабораторних робіт з дисципліни «Системний аналіз складних систем управління» для студентів напрямку підготовки 6.050202 – «Автоматизація та комп’ютерно-інтегровані технології».
Лабораторний практикум охоплює лабораторні роботи, виконання яких передбачено робочою програмою дисципліни М1 – ПП19.
Устаткування, яке використовується для виконання лабораторних робіт, розташоване у комп’ютерному класі кафедри АТПіМЕ в ауд. 1407.
За результатами виконаної роботи оформляється звіт, який повинен містить:
- назву предмета, номер і назву роботи;
- прізвище та ініціали автора, номер групи;
- прізвище та ініціали викладача;
- номер варіанту;
- мету роботи;
- результати проведення досліджень;
- висновки.
Вхідний контроль здійснюється викладачами на початку занять. Захист робіт – після виконаної роботи оцінюється однаковою кількістю балів, сума яких встановлюється лектором та початку семестру.
1 Лабораторна робота №1
«СИСТЕМНИЙ АНАЛІЗ ПРОЦЕСУ УПРАВЛІННЯ В СИСТЕМАХ З КОМПЕНСАЦІЄЮ КООРДИНАТНИХ ТА ПАРАМЕТРИЧНИХ ЗБУРЕНЬ»
Мета, завдання і тривалість роботи.
МЕТА: ознайомитись з структурами систем з компенсацією координатних та параметричних збурень.
ЗАВДАННЯ: вивчити задані структури систем управління.
ТРИВАЛІСТЬ РОБОТИ: 2 академічні години.
Основні теоретичні положення
Системи із компенсацією координатних та параметричних збурень
Ці системи – для нестаціонарних об’єктів, або об’єктів з невідомими характеристиками. Тоді принципи управління, які визначають функціональну структуру системи, можна класифікувати так:
за ступенем нестаціонарності динамічних властивостей об’єкта;
за способом завдання бажаного функціонування;
за способом компенсації впливу нестаціонарності об’єкта.
Загальним для цих класів систем – властивість адаптації за рахунок:
вибору величини і частоти корекції управляючих діянь на основі рекурентних алгоритмів обробки наявної інформації про хід процесів в об’єкті;
зміни динамічних властивостей (параметрів) системи заданої структури (системи із самонастройкою);
комутацією структури та режимів роботи системи (системи із змінною структурою).
Системи координатно-параметричного управління
Системи із самонастройкою використовують у тих випадках, коли степінь нестаціонарності динамічних характеристик ОУ є суттєвою, і її не вдається компенсувати ні зміною параметрів, ні додатковими діяннями.
Використовуються два способи:
організація прямого діяння від прямо чи непрямо (побічно) вимірюванних нестаціонарних параметрів динамічних характеристик ОУ на змінюванні координати ОУ;
організація контура компенсації із зворотніми зв’язками по вимірювальним нестаціонарним динамічним властивостям об’єкта
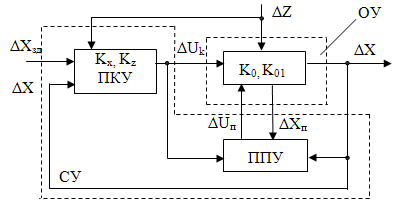
Рисунок 1.1. Структура системи координатно-параметричного управління:
ППТУ – пристрій параметричного управління;
ПКУ – пристрій координатного управління;
СУ – система управління
Основна проблема при створенні – оптимальне сполучення контурів координатного та параметричного управлінь.