

Исходные данные
АВ, м |
ВС, м |
СД, м |
q1, кн/м |
q2, кн/м |
q3, кн/м |
q4, кн/м |
2,5 |
3,0 |
2,2 |
3 |
2,5 |
3,4 |
2,0 |
РЕШЕНИЕ
Заменим действие
распределительных нагрузок сосредоточенными
силами. Эпюра распределительной нагрузки,
действующей на звено
![]() ,
представляет собой прямоугольный
треугольник. Величина эквивалентной
сосредоточенной силы равна
,
представляет собой прямоугольный
треугольник. Величина эквивалентной
сосредоточенной силы равна
![]() .
Точка ее приложения определится
.
Точка ее приложения определится
![]() .
Эпюра распределенной нагрузки, действующей
на звено ВС, представляет собой
прямоугольник. Величина эквивалентной
сосредоточенной силы равна
.
Эпюра распределенной нагрузки, действующей
на звено ВС, представляет собой
прямоугольник. Величина эквивалентной
сосредоточенной силы равна
![]() .
Точка ее приложения определится
.
Точка ее приложения определится
![]() .
Эпюра распределенной нагрузки, действующей
на звено СD,
представляет собой трапецию. Для удобства
замены ее действия эквивалентной силой
разобьем эпюру на два участка –
прямоугольник РОde
и прямоугольный треугольник ОРf.
Величина силы, эквивалентной прямоугольной
эпюры, равна
.
Эпюра распределенной нагрузки, действующей
на звено СD,
представляет собой трапецию. Для удобства
замены ее действия эквивалентной силой
разобьем эпюру на два участка –
прямоугольник РОde
и прямоугольный треугольник ОРf.
Величина силы, эквивалентной прямоугольной
эпюры, равна
![]() .
Точка ее приложения определится
.
Точка ее приложения определится
![]() .
Величина силы, эквивалентной треугольной
эпюры, равна
.
Величина силы, эквивалентной треугольной
эпюры, равна
![]() .
Точка ее приложения определится
.
Точка ее приложения определится
![]() .
.
Освободим систему
от внешних связей и заменим их действия
реакциями. Внешней связью для системы
является гладкая горизонтальная
поверхность. Ее реакцию представим
,
перпендикулярной поверхности и
приложенной в точке
.
Другой внешней связью является
вертикальная гладкая поверхность.
Заменим ее действие горизонтальной
реакцией
![]() в точке
.
в точке
.
Составляем расчетную
схему (рис.2.12) и выбираем систему координат
![]() .
.
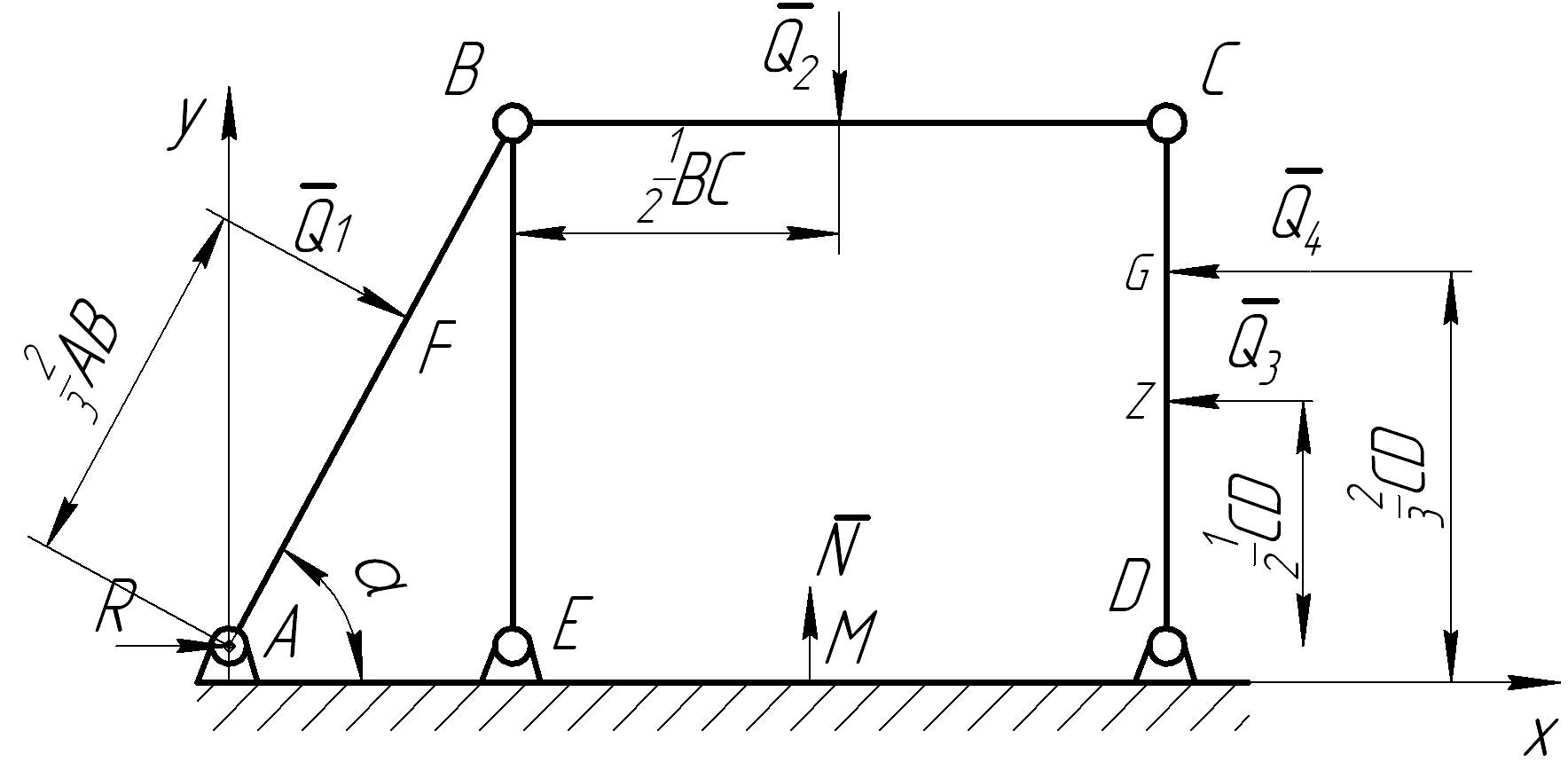
Рис.2.12. Расчетная схема секции крепи.
Получена плоская произвольная система сил. Для определения опорной реакции в точке ее приложения составим условие ее равновесия:
![]() .
.
Составим сумму моментов всех сил относительно точки :
![]()
![]() .
(2.1)
.
(2.1)
Составляем сумму проекций всех сил, действующих на систему, на координатные оси:
![]() (2.2)
(2.2)
![]() (2.3)
(2.3)
Получена система
трех уравнений (2.1), (2.2), (2.3) с тремя
неизвестными
![]() ,
,
![]() и
и
![]() .
В этой системе
.
В этой системе
![]()
![]()
![]()
![]()
![]() ;
;
![]()
Решение системы дает следующее:
![]() .
.
Из уравнения (2.2):
Из уравнения (2.3):
![]() .
.
Из уравнения (2.1):

 .
.
Произведем проверку
вычисленных величин. Для этого составим
сумму моментов всех сил, действующих
на систему, относительно точки ![]() :
:
![]()
![]()
 Определение
реакций в шарнирах проведем методом
расчленения. Выделим из системы тело
и составим для него расчетную схему
(рис.2.13), представив реакции в шарнирах
составляющими
Определение
реакций в шарнирах проведем методом
расчленения. Выделим из системы тело
и составим для него расчетную схему
(рис.2.13), представив реакции в шарнирах
составляющими
![]() .
.
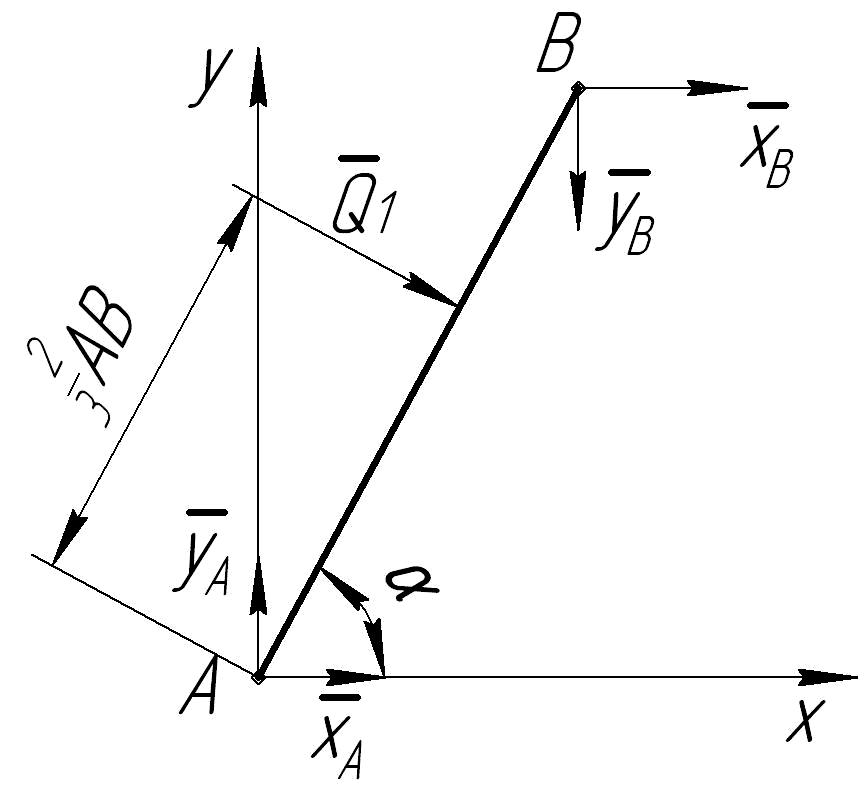
Рис.2.13. Расчетная схема
Получена плоская произвольная система сил. Составим для нее уравнения равновесия:
![]()
![]() (2.4)
(2.4)
![]() (2.5)
(2.5)
![]()
![]() .
(2.6)
.
(2.6)
Система трех уравнений (2.4), (2.5) и (2.6) имеет четыре неизвестные.
Выделим из системы
тело
![]() и составим для него расчетную схему
(рис.2.14). При этом составляющие реакции
в шарнире
равны по величине составляющим в том
же шарнире для тела
,
но противоположны по направлению.
и составим для него расчетную схему
(рис.2.14). При этом составляющие реакции
в шарнире
равны по величине составляющим в том
же шарнире для тела
,
но противоположны по направлению.
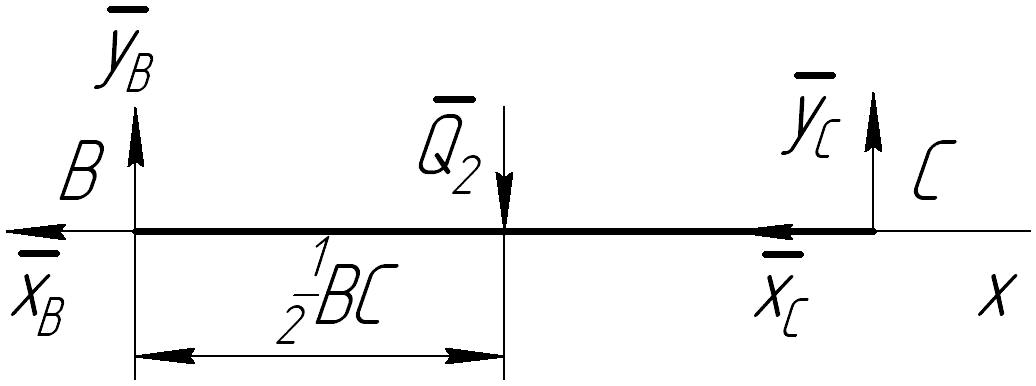
Рис.2.14. Расчетная схема
Получена произвольная плоская система сил. Составляем уравнения равновесия:

![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
![]()
![]() .
(2.9)
.
(2.9)
Система уравнений (2.7), (2.8), (2.9) имеет четыре неизвестные.
Выделим из системы
тело
![]() .
Расчетная схема для него имеет вид
(рис.2.15).
.
Расчетная схема для него имеет вид
(рис.2.15).
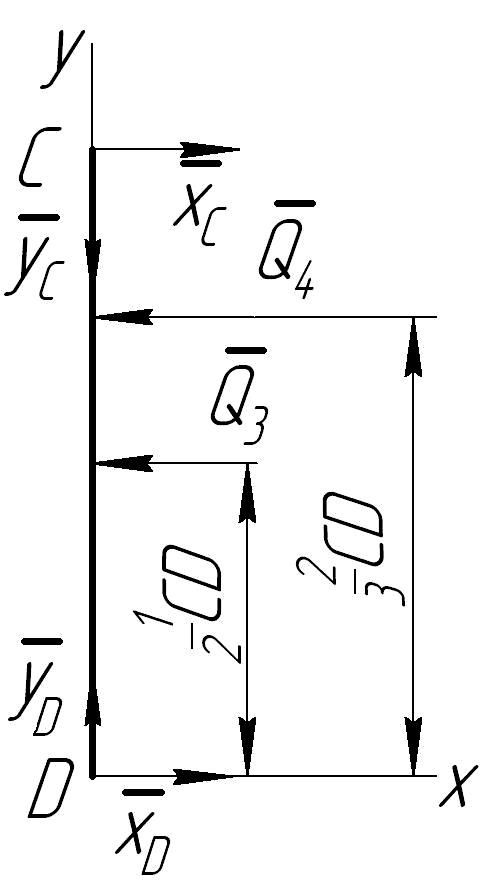
Рис.2.15. Расчетная схема
Имея в виду, что
составляющие реакции шарнира
![]() направлены в стороны, противоположные
аналогичным составляющим для тела
направлены в стороны, противоположные
аналогичным составляющим для тела
![]() ,
составим уравнения равновесия:
,
составим уравнения равновесия:

![]() (2.10)
(2.10)
![]() (2.11)
(2.11)
![]()
![]() .
(2.12)
.
(2.12)
Система уравнений (2.10), (2.11), (2.12) имеет четыре неизвестные.
Выделим из системы
тело
![]() .
Расчетная схема для него примет вид
(рис.2.16).
.
Расчетная схема для него примет вид
(рис.2.16).
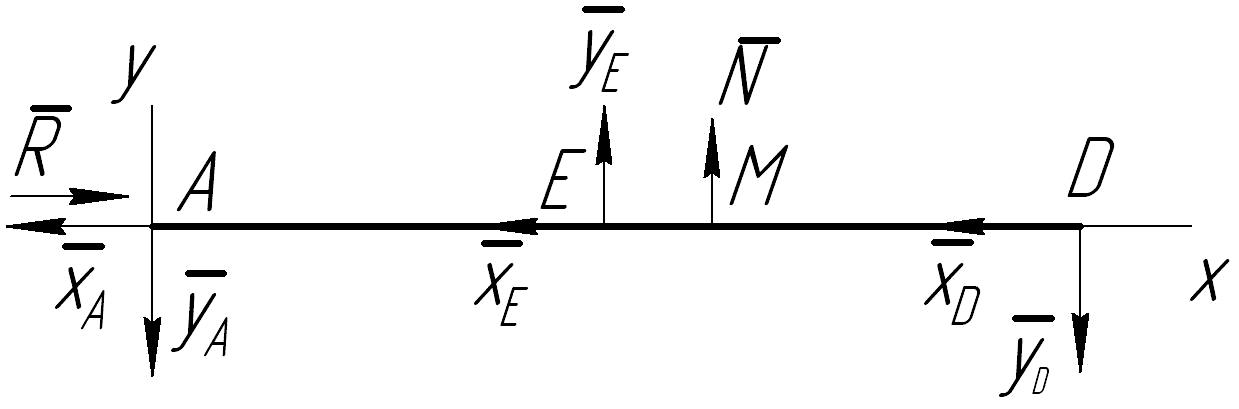
Рис.2.16. Расчетная схема
Составим уравнения равновесия:

![]() (2.13)
(2.13)
![]() (2.14)
(2.14)
![]()
![]() .
(2.15)
.
(2.15)
Решаем полученную систему уравнений (2.4)-(2.15). Из уравнения (2.9) имеем:
![]() .
.
Из уравнения (2.8):
![]() .
.
Из уравнения (2.6):
 .
.
Из уравнения (2.4) имеем:
![]() .
.
Из уравнения (2.11):
![]() .
.
Из уравнения (2.12):
![]() .
.
Из уравнения (2.10):
![]() .
.
Из уравнения (2.7):
![]() .
.
Из уравнения (2.5):
![]() .
.
Из уравнения (2.13):
![]() .
.
Из уравнения (2.14):
![]() .
.
Таким образом, определены все составляющие реакции в шарнирах секции механизированной крепи.
Для проверки найденных величин воспользуемся уравнением (2.15)
![]()