

Лекция 13-14. Системы управления.
При разработке систем управления используются два принципиально разных подхода:
Принцип схемной (жесткой) логики. Здесь в процессе проектирования подбираются микросхемы и разрабатывается такая схема их соединения, которая обеспечивает функционирование системы для управления каким-то одним, строго определенным процессом (или несколькими, но, как правило, не очень сложными), происходящим в аппаратуре. Например, для автоматического выбора диапазонов и настройкой на заданные частоты в радио- и телеприемниках, запоминания номеров наиболее часто вызываемых абонентов и организацией повторных вызовов в телефонных аппаратах и т.д.
П
 ринцип
программируемой логики. В этом случае
с помощью одной или нескольких БИС
строится универсальное устройство,
способное решать множество самых
разнообразных задач по комплексному
управлению работой аппаратуры. По
своему основному узлу – микропроцессору
(МП) – такие УУ обычно называют
микропроцессорными системами
управления (МПС). Например, МПС сейчас
используются для управления работой
целых АТС (электронных и квазиэлектронных),
усилительных подстанций и радиорелейных
станций, кабельных и радиорелейных
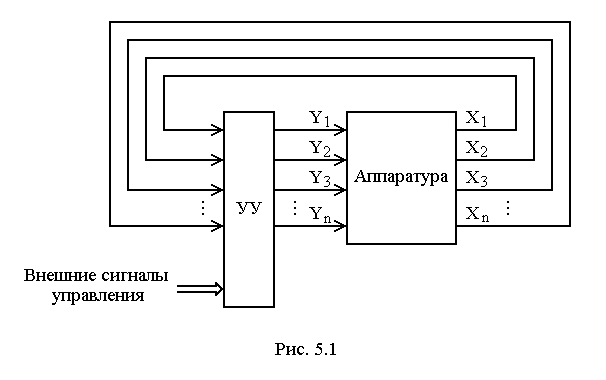
магистралей и т.д.Любое УУ связано с
аппаратурой, для управления которой
оно и предназначено, в основном двумя
группами цепей (рис. 5.1):
ринцип
программируемой логики. В этом случае
с помощью одной или нескольких БИС
строится универсальное устройство,
способное решать множество самых
разнообразных задач по комплексному
управлению работой аппаратуры. По
своему основному узлу – микропроцессору
(МП) – такие УУ обычно называют
микропроцессорными системами
управления (МПС). Например, МПС сейчас
используются для управления работой
целых АТС (электронных и квазиэлектронных),
усилительных подстанций и радиорелейных
станций, кабельных и радиорелейных
магистралей и т.д.Любое УУ связано с
аппаратурой, для управления которой
оно и предназначено, в основном двумя
группами цепей (рис. 5.1):
Управляющие цепи ,
 ,
,
 ,
… ,
,
… ,
 ,
идущие от УУ к аппаратуре. Появление
активного сигнала в одной управляющей
цепи "Y" вызывает
срабатывание соответствующего ЦУ в
аппаратуре, выполняющего нужную
микрооперацию (МО), которую разделить
на более простые действия невозможно.
Активный сигнал на любом управляющем
выходе Y может
одновременно поступать на два или более
цифровых устройства в аппаратуре и
вызывать их одновременное срабатывание.
Такая совокупность активных сигналов
с какого-либо выхода Y
управляющего устройства, под действием
которых происходит одновременное
выполнение нескольких МО в разных узлах
аппаратуры в одном тактовом интервале,
называется микрокомандой (МК).
Последовательность определенного
количества МК, необходимых для решения
поставленной задачи (напоминаем, что
для нас – это задача управления работой
аппаратуры), называется микропрограммой
(МП) решения этой задачи.
,
идущие от УУ к аппаратуре. Появление
активного сигнала в одной управляющей
цепи "Y" вызывает
срабатывание соответствующего ЦУ в
аппаратуре, выполняющего нужную
микрооперацию (МО), которую разделить
на более простые действия невозможно.
Активный сигнал на любом управляющем
выходе Y может
одновременно поступать на два или более
цифровых устройства в аппаратуре и
вызывать их одновременное срабатывание.
Такая совокупность активных сигналов
с какого-либо выхода Y
управляющего устройства, под действием
которых происходит одновременное
выполнение нескольких МО в разных узлах
аппаратуры в одном тактовом интервале,
называется микрокомандой (МК).
Последовательность определенного
количества МК, необходимых для решения
поставленной задачи (напоминаем, что
для нас – это задача управления работой
аппаратуры), называется микропрограммой
(МП) решения этой задачи.Цепи обратной связи , , , …,
 сигналов "флагов" (признаков),
которые формируются в аппаратуре и
идут к УУ. При формировании управляющих
сигналов на выполнение очередной
микрооперации УУ очень часто должно
учитывать результат предыдущей МО. В
этом случае полученный в аппаратуре
результат МО в виде сигнала флага "Х"
по соответствующей цепи обратной связи
поступает в УУ, которое вырабатывает
очередные управляющие сигналы уже с
учетом этого флага.
сигналов "флагов" (признаков),
которые формируются в аппаратуре и
идут к УУ. При формировании управляющих
сигналов на выполнение очередной
микрооперации УУ очень часто должно
учитывать результат предыдущей МО. В
этом случае полученный в аппаратуре
результат МО в виде сигнала флага "Х"
по соответствующей цепи обратной связи
поступает в УУ, которое вырабатывает
очередные управляющие сигналы уже с
учетом этого флага.
Синтез и анализ работы УУ
со схемной логикой.
У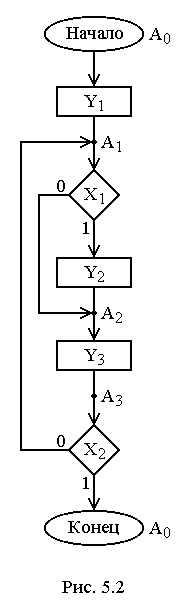 У
со схемной логикой по своей структуре
более простые, поэтому мы с них и начнем.
Для разработки схемы такого УУ необходимо
знать только одно: алгоритм
функционирования аппаратуры (то есть
последовательность выполнения операций
в этой аппаратуре), для управления
работой которой и будет предназначено
данное УУ.
У
со схемной логикой по своей структуре
более простые, поэтому мы с них и начнем.
Для разработки схемы такого УУ необходимо
знать только одно: алгоритм
функционирования аппаратуры (то есть
последовательность выполнения операций
в этой аппаратуре), для управления
работой которой и будет предназначено
данное УУ.
Определяем количество состояний А0, А1, А2 и т.д., в которых могут находиться узлы аппаратуры в процессе работы, и указываем их в алгоритме (рис. 5.2).
Начальное состояние обозначим А0. В дальнейшем каждая микрокоманда Y вызовет срабатывание одного или нескольких устройств аппаратуры, и состояние их меняется: после – A1, после – А2, после – А3. В момент окончания работы аппаратура должна возвратиться в исходное состояние А0 и быть готовой к выполнению следующего цикла работы с новыми исходными данными.
Определяем количество и вид триггеров в регистре состояний.
Для запоминания состояний, в которых будут находиться узлы аппаратуры в отдельных тактовых интервалах, введем в УУ запоминающее устройство – регистр состояний. Количество триггеров в этом регистре n из соотношения 2n ≥ А (где А = 4 – количество состояний) получается равным: n = 2. Как известно, для построения регистра в принципе можно использовать любые триггеры, но в данном случае они должны быть обязательно синхронными для тактирования работы УУ. Возьмем, например, синхронные JK-триггеры.
Таблица истинности регистра состояний (табл. 5.1).
Табл. 5.1
Состояния |
Код состояния на выходах регистра |
|
Q1 |
Q0 |
|
А0 |
0 |
0 |
А1 |
0 |
1 |
А2 |
1 |
0 |
А3 |
1 |
1 |
Здесь
каждому состоянию присвоим свой (в
данном случае двухразрядный) код, который
и будет храниться на выходах регистра
![]() и
и
![]() .
Какой конкретно код какому состоянию
присвоить – в принципе безразлично, но
лучше всего – код номера состояния.
.
Какой конкретно код какому состоянию
присвоить – в принципе безразлично, но
лучше всего – код номера состояния.
Р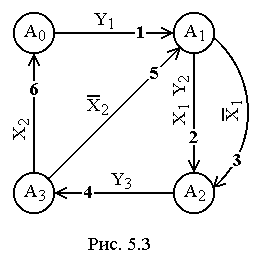 азрабатываем
граф-схему переходов (рис. 5.3).
азрабатываем
граф-схему переходов (рис. 5.3).
Здесь,
пользуясь алгоритмом (см. рис. 5.2), кружками
обозначаем состояния А, стрелками
(каждая такая стрелка называется: граф
перехода) – переходы из одного
состояния в другое ближайшее. Рядом с
каждой стрелкой указываем условия
данного перехода: какие требуются
микрокоманды Y и какие
флаги Х нужно при этом учесть (если
переход выполняется при условии X=1,
то указываем просто: Х; если же Х
= 0, то указываем:
![]() .
Пронумеруем все переходы в любой
последовательности: хотя бы так, как на
рис. 5.3.
.
Пронумеруем все переходы в любой
последовательности: хотя бы так, как на
рис. 5.3.
Составляем таблицу истинности УУ (табл. 5.2):
Табл. 5.2
Номер перехода |
Состояния |
Флаги |
МК |
Сигналы на входах триггеров регистра состояний |
||||||||
предыдущее |
последующее |
|||||||||||
А |
Q1 |
Q0 |
A |
Q1 |
Q0 |
Х |
Y |
J1 |
K1 |
J0 |
K0 |
|
1 |
A0 |
0 |
0 |
A1 |
0 |
1 |
- |
|
0 |
x |
1 |
x |
2 |
A1 |
0 |
1 |
A2 |
1 |
0 |
|
|
1 |
x |
x |
1 |
3 |
A1 |
0 |
1 |
A2 |
1 |
0 |
|
- |
1 |
x |
x |
1 |
4 |
A2 |
1 |
0 |
A3 |
1 |
1 |
- |
|
x |
0 |
1 |
x |
5 |
A3 |
1 |
1 |
A1 |
0 |
1 |
|
- |
x |
1 |
x |
0 |
6 |
A3 |
1 |
1 |
A0 |
0 |
0 |
|
- |
x |
1 |
x |
1 |



П р и м е ч а н и е : сигналы на входах триггеров регистра состояний определяются по таблице переходов соответствующих триггеров (см. табл. 4.4 из § 4.11).
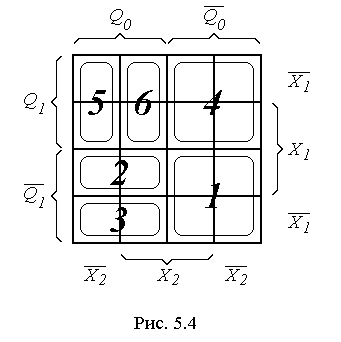
Определяем порядок заполнения карт Вейча.
Для каждой строки табл. 5.2 записываем многочлены СДНФ:
1.
![]() 2.
2.
![]() 3.
3.
![]() 4.
4.
![]() 5.
5.
![]() 6.
6.
![]()
и определяем их место в карте Вейча (рис. 5.4).
Д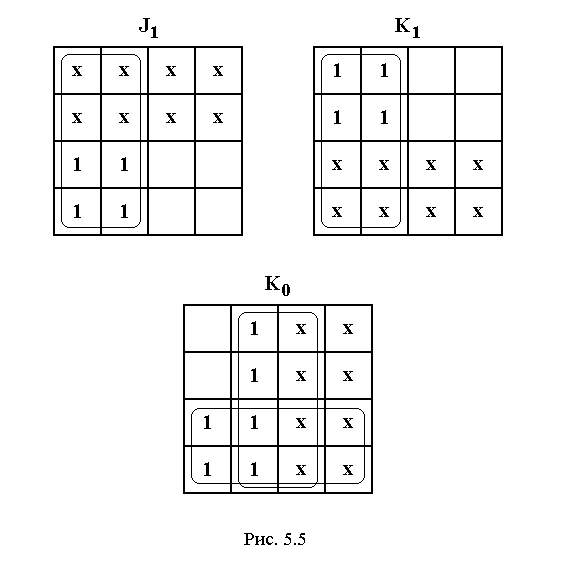 ля
входов J и К всех
триггеров заполняем карты Вейча и
производим объединение клеток (рис.
5.5).
ля
входов J и К всех
триггеров заполняем карты Вейча и
производим объединение клеток (рис.
5.5).
Для
![]() сейчас карту Вейча чертить не обязательно
(см. § 4.11), так как сразу по табл. 5.2 видно,
что
не содержит нулевых значений и,
следовательно, будут заполнены и
объединены все 16 клеток.
сейчас карту Вейча чертить не обязательно
(см. § 4.11), так как сразу по табл. 5.2 видно,
что
не содержит нулевых значений и,
следовательно, будут заполнены и
объединены все 16 клеток.
Записываем МДНФ для входов J и К всех триггеров:
![]() ;
; ![]() ;
; ![]() .
.
Переходим к базису И-НЕ и определяем требуемое количество элементов:
![]() ;
элементы не нужны.
;
элементы не нужны.
![]() ;
1 элемент 2И-НЕ.
;
1 элемент 2И-НЕ.
![]() ;
элементы не нужны.
;
элементы не нужны.
И еще
потребуется 1 элемент 2И-НЕ для отрицания
в логическом выражении для
![]() .
.
Записываем логические выражения для микрокоманд Y в виде отдельных многочленов СДНФ:
![]() ;
;
![]() ;
; ![]() .
.
Переходим к базису И-НЕ и определяем требуемое количество элементов.
Поскольку здесь каждое логическое выражение содержит только один многочлен, то переход к базису И-НЕ проще производить так, так мы делали в § 3.7, то есть проинвертируем обе части каждого выражения:
![]() ;
1 элемент 2И-НЕ.
;
1 элемент 2И-НЕ.
Аналогично выполняем переход и для остальных логических выражений:
![]() ;
1 элемент 3И-НЕ.
;
1 элемент 3И-НЕ.
![]() ;
1 элемент 2И-НЕ.
;
1 элемент 2И-НЕ.
Определяем общее количество компонентов в схеме УУ.
2 синхронных JK-триггера + 4 элемента 2И-НЕ + 1 элемент 3И-НЕ.
Подбираем микросхемы.
По одной микросхеме КР1533ТВ6, КР1533ЛА3 и КР1533ЛА4.
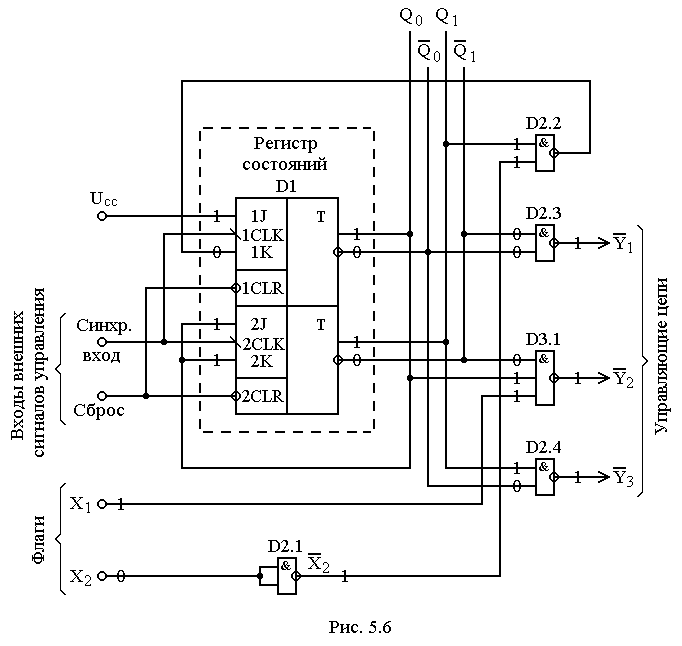 Строим
схему УУ (рис. 5.6).
Строим
схему УУ (рис. 5.6).
Составляем перечень элементов к этой схеме (табл. 5.3):
Поз. обозначение |
Наименование |
Кол. |
Примечание |
D1 |
КР1533ТВ6 |
1 |
|
D2 |
КР1533ЛА3 |
1 |
|
D3 |
КР1533ЛА4 |
1 |
2 элем. не использ. |
Рассмотрим принцип работы УУ на следующем примере: аппаратура находится в состоянии А3; Показать срабатывание УУ, которое обеспечит переход аппаратуры в состояние А1 (переход № 5 по граф-схеме переходов рис. 5.3).
16.1.
Если аппаратура находится в состоянии
А3,
то согласно таблице истинности регистра
состояний (табл. 5.1) на выходах этого
регистра удерживаются сигналы:
![]() ,
,
![]() .
Покажем их в схеме рис. 5.6.
.
Покажем их в схеме рис. 5.6.
16.2.
Согласно граф-схеме переходов (рис. 5.3)
УУ при формировании сигналов управления
для перехода № 5 должно учесть флаг
![]() (на граф-схеме -
).
В рассматриваемом переходе флаг
не учитывается, поэтому его значение
может быть любым: возьмем для определенности
(на граф-схеме -
).
В рассматриваемом переходе флаг
не учитывается, поэтому его значение
может быть любым: возьмем для определенности
![]() .
Покажем и эти значения в схеме рис. 5.6.
.
Покажем и эти значения в схеме рис. 5.6.
16.3. По схеме рис. 5.6 определяем значения сигналов в выходных управляющих цепях, а также на входах J и К всех триггеров регистра состояний.
16.4. На всех управляющих выходах Y сформировались пассивные сигналы логической 1 (все выходы – инверсные, поэтому здесь активным сигналом является 0), то есть ни на одном выходе активный сигнал 0 не появляется. Проверяем полученный результат по граф-схеме переходов (рис. 5.3): действительно, для обеспечения перехода № 5 никакой микрокоманды Y управляющее устройство вырабатывать не должно.
16.5. В определенный момент времени на синхронизирующий вход поступает очередной тактовый импульс, и от его отрицательного перепада (входы CLK триггеров – инверсные динамические, поэтому здесь активным сигналом является отрицательный перепад напряжения) срабатывают триггеры регистра состояний под действием сигналов на входах J и К:
,
 .
В данном случае активный сигнал 1
действует на входе J
(это вход установки), поэтому на прямом
выходе
этого триггера устанавливается 1.
.
В данном случае активный сигнал 1
действует на входе J
(это вход установки), поэтому на прямом
выходе
этого триггера устанавливается 1.
 ,
,
 .
Здесь активные сигналы действуют на
оба входа, поэтому (см. пункт 2 из § 4.3)
триггер переключается в другое состояние,
то есть на его выходе
вместо 1
устанавливается 0.
.
Здесь активные сигналы действуют на
оба входа, поэтому (см. пункт 2 из § 4.3)
триггер переключается в другое состояние,
то есть на его выходе
вместо 1
устанавливается 0.
16.6.
В результате срабатывания на выходах
триггеров регистра состояний
устанавливаются сигналы:
![]() ,
.
Согласно таблице истинности этого
регистра (табл. 5.1) указанные сигналы
соответствуют состоянию А1.
Полученный результат проверяем по
граф-схеме переходов: действительно,
переход № 5 идет в состояние А1.
,
.
Согласно таблице истинности этого
регистра (табл. 5.1) указанные сигналы
соответствуют состоянию А1.
Полученный результат проверяем по
граф-схеме переходов: действительно,
переход № 5 идет в состояние А1.
Вывод: Для обеспечения аппаратуры из состояния А3 в состояние А1 управляющее устройство сработало правильно.
Контрольные вопросы:
Принципы подхода к проектированию систем управления. Особенности построения и функционирования систем управления со схемной и программируемой логикой.
Что такое микрооперация, микрокоманда, микропрограмма?
В чем заключается смысл термина "флаг"?
Тестовые вопросы
Указать основное назначение ЗУ (запоминающего устройства).
Хранить более одного кодового слова
Подключать свой информационный вход к любому из выходов
Использование в качестве делителя частоты импульсной последовательности
Подсчет поступающих на его счетный вход цифровых сигналов
Как называется ЗУ, в котором хранящаяся информация непрерывно обновляется в процессе работы?
ОЗУ (оперативное запоминающее устройство)
МПЗУ (масочное постоянное запоминающее устройство)
РПЗУ ЭС (репрограммируемое постоянное запоминающее устройство с электрическим стиранием информации)
ППЗУ (программируемое постоянное запоминающее устройство)
The glossary
Қазақша |
Орысша |
Ағылшынша |
Граф-схема |
|
flowgraph
|
|
буферное устройство |
buffer unit |
|
вход выбора режима работы (чтение/запись) - |
WR/RD (write/read)
|
Задание для СРС
1. УУ с программируемой логикой.Л.1, стр.159.
Задание для СРСП
По индивидуальному заданию выполнить синтез и анализ работы УУ со схемной логикой.