

 7^
располагать большими запасами избыточных
мощностей ДЛ/ВД
и ДЛ/НД
на турбокомпрессорах, в результате чего
достигаются оптимальные ускорения
роторов и время приемистости двигателя.
Однако, как это видно из динамической
характеристики, двигатель в точке Д
входит в помпаж по КВД, этому процессу
сопутствует отрицательное приращение
скольжения роторов. Поскольку помпаж
недопустим, то приемистость двигателя
необходимо осуществлять по траектории
АВБ,
эквидистантной
поверхности помпажа КВД.
7^
располагать большими запасами избыточных
мощностей ДЛ/ВД
и ДЛ/НД
на турбокомпрессорах, в результате чего
достигаются оптимальные ускорения
роторов и время приемистости двигателя.
Однако, как это видно из динамической
характеристики, двигатель в точке Д
входит в помпаж по КВД, этому процессу
сопутствует отрицательное приращение
скольжения роторов. Поскольку помпаж
недопустим, то приемистость двигателя
необходимо осуществлять по траектории
АВБ,
эквидистантной
поверхности помпажа КВД.
Аналогично при сбросе газа (кривая БЕГ) в точке Г двигатель входит в помпаж по КНД, поэтому сброс газа необходимо проводить замедленно по траектории БЕА.
Таким образом, для корректировки расхода топлива в соответствии с траекториями приемистости АВБ и сброса газа БЕА в САУ двигателя следует ввести автомат приемистости и гидрозамедлитель двустороннего действия, которые полностью автоматизируют работу двигателя на неустановившихся режимах прямой и обратной тяги.
12.4. Общая схема управления
Управление двухвальным ТРДД по принятым программам осуществляется комплексом регуляторов и автоматов. Последовательность и время их работы на режимах удобно представлять на динамической характеристике двигателя, которая в упрощенном виде и однороторном представлении для ТРДД Д-ЗОКУ и Д-ЗОКП показана на рис. 12.7.
 Работа
САУ двигателя начинается, когда давление
топлива после HP
становится достаточным для организации
процесса горения в камере сгорания
(точка В этой точке включается в работу
топливный автомат запуска ТАЗ и
распределительный клапан, предназначенный
для распределения топлива по контурам
форсунок. Распределительный клапан
работает на всех режимах до момента
подачи сигнала на останов. ТАЗ вступает
в работу с момента подачи топлива (точка
рф)
до выхода на режим малого газа.
Работа
САУ двигателя начинается, когда давление
топлива после HP
становится достаточным для организации
процесса горения в камере сгорания
(точка В этой точке включается в работу
топливный автомат запуска ТАЗ и
распределительный клапан, предназначенный
для распределения топлива по контурам
форсунок. Распределительный клапан
работает на всех режимах до момента
подачи сигнала на останов. ТАЗ вступает
в работу с момента подачи топлива (точка
рф)
до выхода на режим малого газа.
Траектория линии установившихся режимов в диапазоне от МГ до НАУ обеспечивается регулятором GT = const, а траектория линии НАУ...max — регулятором лвд = const.
Линия МК отражает скачок расхода топлива при срабатывании механизации компрессора, т. е. при срабатывании КПВ и при перекладке лопаток ВНА по командам, поступающим соответственно от датчика приведенных частот вращения ДПО-ЗОК и регулятора РНА.-ЗОК.
Траектория линии приемистости на участке от частоты малого газа до частоты НАУ обеспечивается работой замедлителя сброса частоты (ЗСЧ), входящего в состав регулятора расхода топлива. Если приемистость задается с частот выше частоты НАУ, но ниже частоты взлетного режима, то замедлитель не оказывает влияния на приемистость и ее время определяется автоматом приемистости (АП).
Приемистость на участке НАУ... ГОС (гибкая обратная связь) обеспечивается гидравлическим усилителем (ГУ) настройки режимов, работа которого связана с работой регулятора пва = const. Точка ГОС соответствует частоте вращения на 1 . . . 1,5% меньше частоты вращения на максимальном режиме и характеризует начало работы ГОС регулятора лвд = const. Гибкая обратная связь обеспечивает затухание колебаний частоты вращения ротора и его торможение вблизи заданного режима работы двигателя по окончании приемистости, при условии, что колебания частоты Длвд и температуры At' не выйдут за пределы допустимых значений. Колебательный процесс торможения ротора по окончании приемистости на динамической характеристике представлен в виде спиральной линии ГОС.. max.
При температуре наружного газа выше /я.0Гр ограничения частоты вращения и температуры газа за турбиной осуществляются ГУ, а при t'„ < f„.orp— механизмом ограничения давления р»тах.
Максимально допустимая температура газа за турбиной, превышающая на 5°С температуру ограничения, при всех реальных температурах наружного воздуха поддерживается всережимным предельным регулятором температуры ВПРТ-44.
Замедление сброса частоты вращения в заданном темпе при резком переводе РУД с максимального режима или некоторого промежуточного в положение, соответствующее малому газу, обеспечивается ЗСЧ регулятора постоянного расхода топлива.
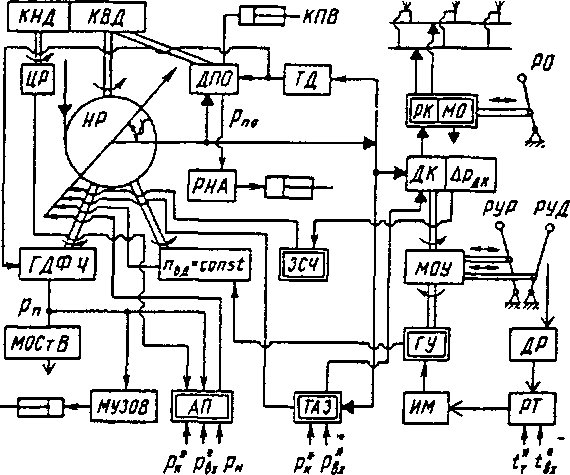
Схема подключения к двигателя, как объекту управления перечисленных автоматических устройств, определяет структурную схему САУ, которая наглядно позволяет представить взаимные связи между отдельными устройствами.
В САУ ТРДД Д-ЗОКУ и Д-ЗОКП в качестве единственного УФ используется расход топлива GT. Система включает в себя плунжерный топливный насос переменной производительности HP (рис. 12.8) с наклонной шайбой, которая выполняет функцию УО, и регуляторы лвд = const и GT = const с дроссельным краном (ДК). Координация работы регуляторов достигается с помощью механизма объединенного управления, имеющего механическую связь с золотником ДК и ГУ регулятора лвд = const.
Закон управления двигателя на режимах работы выше НАУ реализуется регулятором лвд = const. Чувствительный элемент этого регулятора, замеряя отклонение параметра пвд, названного внешними возмущениями, воздействует на Ст изменением угла у наклонной шайбы HP и устраняет возникшее отклонение.
Применение в данном случае замкнутой системы регулирования ТРДД — регулятор — ТРДД позволяет при приемлемых- динамических свойствах ее получить высокую точность регулирования частоты вращения турбокомпрессора ВД. Для ограничения максимально допустимой температуры газов в САУ предусмотрен предельный регулятор ВПРТ-44, который по параметру /.* ограничивает tr в соответствии с соотношением (12.5).
Во время работы двигателя ЭДС с блока термопар температуры /" и приемника температуры /,„ поступает на регулятор температуры РТ-12-4М (РТ), где напряжение ЭДС сравнивается с опорным напряжением датчика режимов ДР-4М (ДР), которое зависит от положения РУД. Электрический сигнал с РТ поступает в исполнительный механизм ИМТ-З(ИМ), который преобразует его в гидравлический. Гидравлический сигнал, воздействуя на ГУ регулятора лвд = const, ограничивает /т и уменьшает расход топлива.
На частотах вращения ниже частоты НАУ механизм объединенного управления- отключает регулятор лвд = const и подключает регулятор GT = const, который^ определяет расход топлива в диапазоне ручного управления от лвдмг до лВДНА и на режимах обратной тяги.
Принцип работы этого регулятора основан на поддержании постоянного перепада давлений дрдк = const на ДК при различных положениях его золотника, т, е. при заданной площади проходного сечения.
При приемистости расход топлива в диапазоне ручного управления корректирует ЗСЧ, который ограничивает перепад давлений Ардк,воздействуя на угол наклона шайбы. При частичной приемистости от малого газа до режима выше частоты НАУ, но ниже максимального работает пневматический АП, который сравнивает давление топлива, пропорциональное корректированному по р„ перепаду давлений воздуха (рк — Рвх), с давлением топлива рп, пропорциональным квадрату частоты вращения ротора ВД, и подает сигнал на изменение угла наклона шайбы.
Командное давление топлива р„ вырабатывается в гидравлическом датчике физической частоты вращения (ГДФЧ).
Частичная приемистость с режимов, превышающих частоты НАУ, обеспечивается соответственно ГУ и ГОС в результате ил воздействия на. регулятор лвд = const, а сброс газа во всем диапазоне частот — ЗСЧ.
Отключение воздушного турбостартера при запуске производится по электрическому сигналу из механизма отключения (МОСтВ), преобразованному из гидравлического давления р„. Работа ЗОВ на ПОС Ш^ачелй также осуществляется по давлению р„ механизмом управления гидроцилиндром заслонки отбора воздуха (МУЗОВ).
Клапаны перепуска воздуха КПВ за V и VI ступенями КВД управляются с помощью датчика приведенных частот ДПО-ЗОК,. имеющиго гидравлическую связь с HP и температурным датчиком ТД-ЗОК (ТД), назначением которого является выдача гидравлического сигнала, пропорционального температуре tlx. Датчик ДПО вырабатывает также гидравлический сигнал, пропорциональный квадрату приведенной частоты вращения, который служит для управления регулятором РНА-ЗОК (РНА).
В САУ предусмотрен ограничитель частоты вращения турбокомпрессора НД, которым является центробежный регулятор ЦР-1-30К (ЦР). Этот регулятор при достижении частоты лнд ^ лНДо1.р открывает слив топлива из АП, уменьшая производительность HP и, следовательно, ограничивая увеличение частот вращения ротора НД.
Перевод двигателя на режим обратной тяги производится с помощью РУР, который выдает гидравлический сигнал на перекладку створок реверсивного устройства и имеет два положения: ПРЯМАЯ ТЯГА и ОБРАТНАЯ ТЯГА.
Управление режимами обратной тяги производится с помощью РУД и регулятора GT = const.
Останов двигателя производится рычагом останова (РО), который имеет два положения: РАБОЧИЕ и ОСТАНОВ, и механизмом останова (МО), который может также включаться по аварийному электрическому сигналу.