

§ 2. Характеристики двигателей силовых приводов
Х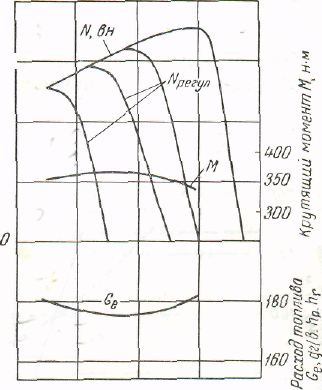 арактеристики
двигателей
внутреннего
с
г о р а п и я. В буровых установках
применяют двигателя вну
треннего
сгорания, эксплуати
рующиеся
на тяжелых сортах
топлива
или газа. Двигатели,
работающие
на легких сортах ^600
топлива
(бензинеили керосине), Ч
не
применяются ввиду их нсэко- ^
комичности. е
арактеристики
двигателей
внутреннего
с
г о р а п и я. В буровых установках
применяют двигателя вну
треннего
сгорания, эксплуати
рующиеся
на тяжелых сортах
топлива
или газа. Двигатели,
работающие
на легких сортах ^600
топлива
(бензинеили керосине), Ч
не
применяются ввиду их нсэко- ^
комичности. е
гею
Соответствие ДВС заданным g условиям работы определяется I его внешней характеристикой 5 и конструкцией. В н е ш н'е и или механической характеристикой ДВС называется изменение мощности, крутящего момента и расхода топлива в зависимости -от скорости вращения коленчатого вала.
900 1100 /300 1500 1700 Сноросто вращения п,о5/мин
Рис. XVII-1. Внешняя и частная характеристики дизеля.
М — крутящий момент; N — мощность-
JV „ —частная характеристика; G —-рас- per*^ t
ход топлива.
В ДВС для восстановления равновесия между изменившимся моментом сопротивления и моментом двигателя требуется воздействие на источник энергии специальных регуляторов, которые изменяют соответственно подачу горючего.
ДВС могут работать при изменении весового соотношения количества воздуха и топлива сравнительно в небольшом диапазоне — от 15 : 1 (бедная смесь) до 11 : 1 (богатая смесь).
24
371
Если подача топлива ограниченная и будет применяться бедная смесь, двигатель не развивает своей полной мощности и такую характеристику называют частичной.
Приемистость и приспособляемость двигателей определяются конструкцией системы подвода топлива и воздуха и моментом инерции вращающихся частей шатунно-поршневой группы.
У быстроходных двигателей шатунно-кривошипную группу облегчают, благодаря чему эти двигатели имеют большую приемистость, чем тихоходные.
Чем выше коэффициент собственной приспособляемости дйига-теля, тем устойчивее его работа при переменных режимах нагрузки, что особенно важно для двигателей, приводящих в движение буровые лебедки.
На рис. XVII-1 показаны внешняя и частная характеристики ДВС. Как видно из графика, при изменении скорости вращения на ±20% момент практически остается постоянным, в этом случае ДВС не перегружаются. ДВС с такой характеристикой используют непосредственно в приводе насосов, эксплуатирующихся без средств искусственной приспособляемости, а в приводе лебедки и ротора, требующих большого диапазона регулирования, — только со средствами искусственной приспособляемости,
Характеристики электродвигателей
Под внешней или механической характеристикой электродвигателя подразумевают изменение крутящего момента в зависимости
250
о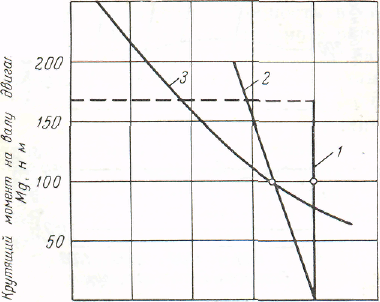 т
изменения скорости вращения,
напряжения, частоты тока
и магнитного потока в
якоре.
т
изменения скорости вращения,
напряжения, частоты тока
и магнитного потока в
якоре.
На рис. XVII-2 приведены механические характеристики электродвигателей. Различают три вида характеристик.
1. Абсолютно жесткая (прямая!); скорость при из менении момента постоянна. Такой характеристикой об ладают синхронные электро двигатели.
О 25 50 75 100 125
Относительная спорость вращения, %
Рис. XVII-2. Механические характеристики электродвигателей.
2. Жесткая (кривая 2); с увеличением момента ско рость снижается незначитель но. Такой характеристикой обладают асинхронные дви гатели и двигатели постоянного тока параллельного и независимого возбуждения.
3. Гибкая (кривая 3); при небольшом увеличении момента про-
372
исходит значительное изменение скорости. Такой характеристикой обладают двигатели постоянного тока последовательного возбуждения.
Скорость электродвигателя и развиваемый им момент изменяются автоматически без воздействия каких-либо внешних регуляторов. Автоматическим регулятором является иротивоэлектродвижущая сила самого -двигателя.
Характеристика асинхронных двигателей. В асинхронных двигателях:
крутящий момент М пропорционален квадрату напряжения, и поэтому привод весьма чувствителен к его колебаниям;
Относительная
Рис. XVII-3. Внешние характеристики электродвигателей.
1 — синхронного; 2 — асинхронного с короткозамкну-тьш ротором; з, 3' и 3" — асинхронного с фазным ротором; -I — асинхронного с дросселем.
критическое скольжение SK прямо пропорционально активному сопротивлению ротора, обратно пропорционально частоте сети и суммарной индуктивности статориои и роторной обмоток от потоков рассеяния и не зависит от напряжения сети;
максимальный крутящий момент Л/"шат пропорционален квадрат^.*-напряжения и обратно пропорционален квадрату частоты тока сети, в результате чего асинхронный электропривод весьма чувствителен к колебаниям параметров сети.
Для силовых приводов буровых установок, питающихся от общепромышленных сетей при . допускаемом колебании напряжения 4-5 и —10%, максимальный момент может уменьшаться до 0,8 от указанного в каталогах. При пусках электродвигателей напряжение в сети падает ниже этих пределов. Поэтому к асинхронным двигателям предъявляется требование высокой перегрузочной способности даже во время падения напряжений и больших пусковых моментах при относительно небольшом значении пусковых токов.
На рис. XVI1-3 показаны внешние характеристики электродвигателей переменного трехфазного тока-
373
Асинхронный электродвигатель с ко-р о т к о з а м к н у т ы м ротором запускается непосредственно при включении в сеть без промежуточных пусковых устройств. Такие электродвигатели могут применяться для привода насосов и ротора; для привода лебедки они применяются только с турботрапсформаторами или электромагнитными муфтами скольжения.
Электродвигатель с фазным ротором имеет контактные кольца, что позволяет вводить в цепь ротора добавочное сопротивление, по величине которого определяют некоторые искусственные характеристики (кривые 3, 3' и 3" на рис. XVII-3), используемые при регулировании скорости вращения во время пуска.
Введение добавочного активного сопротивления увеличивает полное сопротивление роторной цепи, благодаря чему снижается пусковой ток, возрастают пусковой момент и критическое скольжение .
Максимальный момент остается неизменным. Регулирование активного сопротивления в роторной цепи осуществляется так, чтобы переключения с одной реостатной характеристики на другую происходили при расчетных значениях моментов переключения. По окончании пуска сопротивление в цепи ротора уменьшается и двигатель начинает эксплуатироваться при рабочих параметрах. Для смягчения рабочих характеристик добавочное сопротивление в цепи ротора не выключается.
Процесс пуска может быть автоматизирован по времени, по току, а также в функции тока с корректировкой по времени.
Для буровых лебедок применяют автоматизацию пуска в функции времени. Увеличение числа ступеней улучшает плавность пуска, однако при этом увеличивается масса, усложняется и удорожается пусковая аппаратура.
При использовании индуктивного сопротивления в цепи ротора, несмотря на некоторое снижение величины максимального момента, получают лучшие результаты.
Индуктивное сопротивление выполняет функцию автоматического -регулятора тока ротора. В начале разгона двигателя, когда частота тока ротора близка к частоте сети, сопротивление дросселя велико и ограничивает силу пускового тока. По мере разгона частота тока в роторе понижается, сопротивление дросселя уменьшается и ток за весь период пуска остается примерно постоянным.
В электродвигателях с фазным ротором могут применяться системы управления, в которых дроссель насыщения с внутренней обратной связью в сочетании с активными сопротивлениями симметрично включается в цепь ротора.
В процессе пуска индуктивное сопротивление изменяется под влиянием силы и частоты тока ротора, а при автоматическом управлении — также и результирующего тока управления. Величины активных сопротивлений в процессе пуска не изменяются. Характеристика такого двигателя показана на рис. XVII-3, кривая 4.
374
СЕ1нхронный электродвигатель (кривая 1 на рис. XVI1-3) имеет постоянную скорость вращения, которая может регулироваться только изменением частоты питающего напряжения; момент, развиваемый двигателем, пропорционален первой степени напряжения; перегрузочная способность двигателя может быть повышена увеличением возбуждения.
Пусковые характеристики синхронного двигателя определяются пусковой характеристикой, короткозамкнутой обмоткой ротора, которая придает синхронному двигателю в режиме пуска свойства асинхронного короткоеамкнутого двигателя. Эксплуатационные преимущества синхронных двигателей определяются его способностью отдавать в сеть реактивную мощность, необходимую для повышения cos ф. Однако абсолютно жесткая механическая характеристика двигателя и невозможность запуска под нагрузкой ограничивают его использование.
К недостаткам синхронных двигателей следует отнести также большой пусковой ток, однако при достаточно мощных промысловых сетях и подстанциях осуществляют их прямой пуск. Основные данные синхронных двигателей аналогичны данным асинхронных.
Конструкции двигателей защищаются от попадания влаги, пыли и грязи и выполняются прочными, допускающими установку на открытом воздухе.
Электродвигатели постоянного тока
Электродвигатели постоянного тока применяются в буровых установках для бурения скважин большой глубины, когда к приводу предъявляются требования глубокого и плавного регулирования скорости вращения, точной остановки, повышенной плавности разгона и торможения и других режимов со сложным изменением механической характеристики.
Так как на нефтяных промыслах отсутствуют сети постоянного тока, в буровых установках электродвигатели постоянного тока применяются только с автономным приводом в сочетании с генераторами постоянного тока, вращаемыми двигателями внутреннего сгорания. Такой привод называется электромашинной передачей постоянного тока.
Скорость вращения двигателей постоянного тока можно регулировать путем изменения напряжения в якоре или тока возбуждения двигателя. Поскольку для изменения напряжения на зажимах якоря в электромашинной передаче необходимо изменять -ток возбуждения генератора, управление двигателей постоянного тока всецело осуществляется в целях возбуждения, т. е. в цепях сравнительно малой мощности.
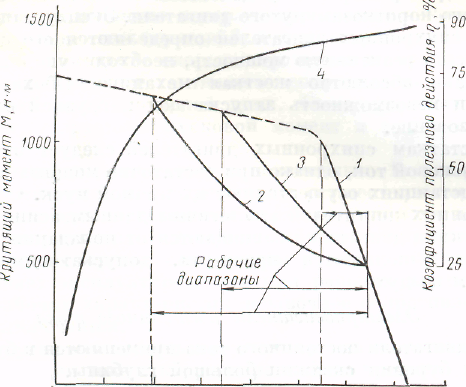
В зависимости от способа возбуждения характеристики двигателей постоянного тока различные. Различают три основных способа возбуждения двигателей постоянного тока. На рис. XVII-4 приведены механические характеристики при различных способах возбуждения.
375
При параллельном возбуждении (кривая 7, рис. XVI1-4) с изменением нагрузки магнитный поток не изменяется, поэтому пределы регулирования и характеристика определяются величиной сопротивления цепи якоря.
При последовательном (сериесном) возбуждении (кривая 2, рис. XVII-4) магнитный поток зависит от тока нагрузки; в этом случае механическая характеристика будет зависеть от магнитного потока и сопротивления в цепи якоря.
О 100 200 300 4QQ 50Q 600 700 800 900
Скорость вращения бала зпектродЪиъателя п, oS/мин '
Рис. XVII-4, Характеристики электродвигателей постоянного тока с различными способами возбуждения.
1 — параллельным; 2 — последовательным; з — смешанным; 4 — к. п. Д. двигателя с последовательным возбуждением.
При смешанном (кривая 5, рис. XVII-4) возбуждении суммарный магнитный поток, действующий в электродвигателе, определяется двумя составляющими: постоянной, создаваемой обмоткой параллельного возбуждения, и переменной, создаваемой обмоткой последовательного возбуждения.
В буровых установках применяют электродвигатели с последовательным или смешанным возбуждением.
Характеристики газотурбинных двигателей
Газотурбинные двигатели обладают хорошей приемистостью, большой надежностью и высокой естественной приспособляемостью.
Газотурбинные двигатели бывают двухвальными (рис. XVII-5, а), о дневальными (рис. XVII-5, б) и комбинированными.
376
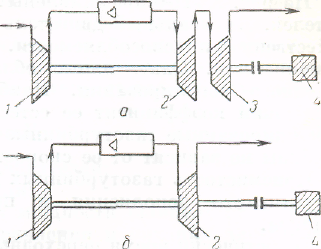
В двухвальном газотурбинном двигателе турбина высокого давления приводит во вращение компрессор, а силовая турбина низкого давления находится на отдельном валу и в нее поступает газ из турбины высокого давления.
Рис. XVII-5. Схемы газотурбинных установок.
а — двухвалыгый; б — о дневальный; 1 — компрессор; 2 — турбина; Я — турбина второй ступени; 4 — исполнительный механизм.
Независимость питания газом турбин позволяет изменять характеристику двигателя в широких пределах. В одновальных газовых турбинах компрессор и турбина располагаются па одном валу. При увеличении внешней нагрузки снижается скорость вращения и уменьшается количество газа, питающего турбину, в результате чего снижается мощность и уменьшается крутящий момент.
Комбинированный газотурбинный двигатель состоит из генератора газа со свободнодвижу-щимися поршнями и одновальной газовой турбины. Генератор газа имеет поршневой компрессор, поршни которого непосредственно соединены с поршнями двухтактного дизеля. Снижаемый в порш-

О 0,25 0,5 0,75 W
Относительная скорость вращения вала
Рис. XVII-6. Характеристики газотурбинных двигателей.
и
JV3
—
N2 то же комбинированного двигателя.
левом компрессоре воздух через всасывающие окна подается в цилиндр дизеля, куда подводится топливо. Отработанные газы
377
из дизеля при большом давлении подаются через продувочные окна в газовую турбину, передающую мощность на исполнительный механизм.
На ряс. XVII-6 представлены характеристики газотурбинных двигателей. Двухвальный двигатель обладает большим коэффициентом естественной приспособляемости, чем одновальный, и имеет большую приемистость. Одновальные обладают меньшим диапазоном естественного регулирования. Наибольший диапазон регулирования и высокий коэффициент ее естественной приспособляемости имеют комбинированные газотурбинные двигатели, так как питание газом турбины не зависит от ее скорости вращения.
Приемистость газотурбинных двигателей зависит от схемы, конструктивного исполнения и программы регулирования подачи топлива.
Теоретически время переходных периодов может быть определено при помощи уравнений термодинамики. Практически у двигателей без регенератора время перехода от холостого хода к полной нагрузке составляет несколько секунд, что является вполне приемлемым для двигателя силового привода буровой установки.
Двух- и одновадьные газотурбинные установки характеризуются эффективным к. п. д., имеющим более низкое значение (0,12—0,27) по сравнению с к. п. д. двигателей внутреннего сгорания (0,36— 0,38). Комбинированные газотурбинные установки имеют более высокий к. п. д., чем одно- и двухвалыше, и по значению близкий к к. п. д. дизелей (0,35—0,38). На холостом ходу и при незначительных нагрузках к. п. д. двух- и одновальных установок очень низок, что служит препятствием для широкого применения их. в буровых установках.
Имеется ряд путей повышения к. п. д. газотурбинных двигателей, например использование тепла отходящих газов для технологических нужд и т. д.