

§ 7. Количество скоростей подъема и их соотношение
При операциях подъема бурильных колонн сила тяжести на крюке уменьшается по мере извлечения каждой свечи. Буровая установка может бурить скважины, отличные по конструкции и глубине от принятой для расчета типовой. Поэтому для рационального использования установленной мощности главного подъема и уменьшения времени механического подъема привод лебедки должен иметь характеристику
2>K = idem; (VI-68;
176
Для привода с ступенчатым изменением скоростей в этом случае число скоростей равно числу свечей в колонне, что практически невозможно осуществить.
Поэтому в подъемных механизмах только с механическими передачами и двигателями с нерегулируемой скоростью вращения вала большое значение имеет выбор количества и соотношения скоростей подъема, обеспечивающее минимальное время механического подъема.
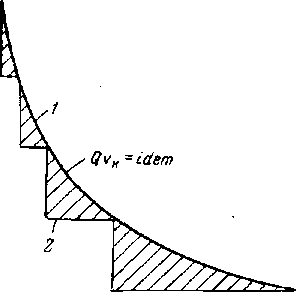
Скорость крюка vk
Рис. VI-11. Зависимость скорости подъема от нагрузки на крюке.
На рис. VI-11 показана зависимость между грузоподъемностью на крюке Q и скоростью его подъема vk для идеального подъемника (кривая 7) и подъемника со ступенчатым изменением скоростей подъема (кривая 2).
Из этого графика видно, что при ступенчатом изменении скоростей полностью мощность на крюке может быть использована
т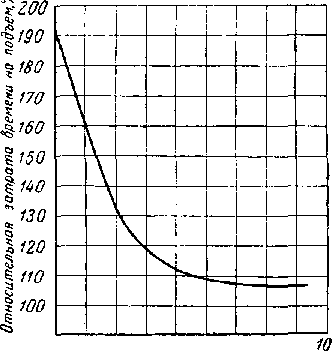 олько
в одной точке на каждой скорости. Во
всех остальных случаях происходит
недоиспользование
мощности (заштрихованные площади
на графике).
олько
в одной точке на каждой скорости. Во
всех остальных случаях происходит
недоиспользование
мощности (заштрихованные площади
на графике).
Количество скоростей подъема. В подъемных механизмах с нерегулируемой скоростью вращения вала двигателя и ступенчатым изменением скоростей подъема увеличение количества ступеней оправдано только до известного предела.
' 23456789
Число скоростей Z
Рис. VI-12. Зависимость относительного времени механического подъема от числа скоростей.
На рис. VI-12 представлена зависимость времени механического подъема от числа скоростей подъема при их рациональном соотношении, за 100% приняты затраты времени при идеальном подъемнике.
Влияние мощности привода и
зависимости коэффициентов ее использования от числа скоростей показано на рис. VI-13.
12 Заказ 1015.
177
Из рис. VI-12 и VI-13 видно, что с увеличением числа скоростей подъема относительные потери времени асимптотически приближаются к нулю. С увеличением вспомогательного времени подъема влияние числа скоростей уменьшается, как видно из этих графиков, применение подъемных механизмов с числом ступеней более шести становится нецелесообразным вследствие того, что мощность привода используется уже достаточно полно при числе скоростей до шести, Выбор числа скоростей подъема буровой установки зависит от уравнения кривой проходки. Чем больше необходимо сделать рейсов для бурения типовой скважины, тем большим количеством скоростей
п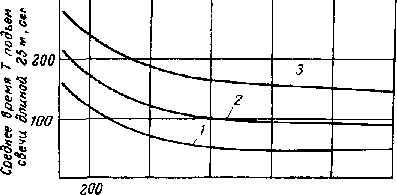 одъема
должен обладать подъемник.
одъема
должен обладать подъемник.
Увеличение количества скоростей ведет к усложнению конструкции. В подъемных механизмах с силовыми приводами, обеспечивающими автоматическое изменение скоро-
Рис. VI-13. Влияние мощности подъема на среднее время подъема одной свечи при различном вспомогательном времени.
j - * = 0; 2-* =60с«е; 3 - („„ = 120 сек.
ЮОО
1200
400 600 800
Мощность N, кВт
сти подъема при изменении нагрузки на крюке, число ступеней передач трансмиссии определяется диапазоном рационального автоматического регулирования .йт, ограничиваемого
обычно к. п. д. этого устройства. В подъемных механизмах в качестве устройств для автоматического регулирования применяют гидро- и электромашинные передачи, обладающие тем свойством, что при расширении диапазона регулирования снижается их к. п. д. В результате изменяется вся характеристика подъемного механизма и требуется выбирать число его скоростей с учетом характеристик этих устройств.
Кроме того, при подъеме бурильных колонн оператор не всегда может уловить момент целесообразности перехода на более высокую передачу, и подъем груза может производиться в этих случаях не на рациональном режиме.
В подъемных механизмах с автоматическим регулированием скоростей подъема их число ступеней выбирается с учетом располагаемой мощности к. п. д., свойств и режима работы силового привода. Диапазоны регулирования выбираются из соотношения
Здесь Л —общий диапазон регулирования; ~?д — то же двигателя;
-Д
-саморегулирующего устройства (турбоэлектроыашинная передача); Лм —механический диапазон коробки скоростей.
178
Число рабочих скоростей подъема для подъемного механизма с автоматически регулирующимся силовым приводом определяется из формулы
к.
->„ *tVK miii
S f\T I „ 1\D
(VI-70)
где С—коэффициент равномерности (при помощи ./V в кет С = 102);
а —число двигателей силового привода главного подъема; Л^ —мощность на крюке.
Д ля
скважин, бурение которых производится
с большим коли
чеством рейсов,
как показала практика, целесообразно
применять
подъемные механизмы
ля
скважин, бурение которых производится
с большим коли
чеством рейсов,
как показала практика, целесообразно
применять
подъемные механизмы
только с автоматически | регулирующимся приво- ^ дом и с числом рабочих ско- ** ростей, равным 2—3. Для « установок с нерегулиру- | ющимся приводом количество рабочих скоростей выбирается 4—5.
2 з 4
Число скоростей 2
Рис. VI-14. Теоретическое я фактическое соотношение скоростей подъемного механизма при Лд=1<1ет.
Кроме основных рабочих скоростей, в буровой подъемной установке целесообразно иметь одну передачу на барабан лебедки, имеющую наивысшую
О 12345В
скорость для подъема ненагруженного элеватора. Аварийная скорость в бу-ро*ых подъемниках принимается как первая рабочая скорость. Общее число скоростей подъемного механизма тогда определится как
* = *„ + !. (VI-71)
Соотношение между скоростями подъема
Многими исследователями были предложены формулы для определения соотношения промежуточных скоростей подъемных' механизмов, учитывающие различные факторы.
На рис. VI-14 приведен график скоростей для четырех- и шести-скоростного подъемника, построенный по различным теоретическим зависимостям (кривые 7, 2 и 4) и фактическим соотношениям выполненных буровых установок (кривая 3 для подъемника установки с регулируемым приводом — дизеля с турботрансформатором и кривая 5 для нерегулируемого привода с электродвигателем переменного тока).
12*
179
Как видно из этого графика, все известные методы расчета соотношения скоростей дают результаты, находящиеся между кривой 1 для геометрического ряда и кривой 2 при равенстве времени подъема на различных передачах.
При выполнении подъемного механизма обычно вследствие конструктивных осложнений отступают от принятой теоретической закономерности. Как видно из кривых 3 и 5, в подъемных механизмах с нерегулируемым приводом соотношение скоростей играет важную роль и скорости их следует подбирать из соображений наименьшей затраты времени на подъем за все время бурения.
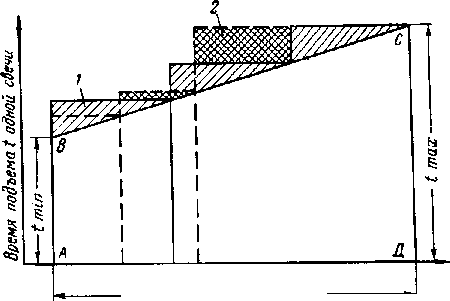
Метод этот заключается в следующем: сначала определяют затраты времени на подъем при бесступенчатом и ступенчатом изме-
Число сбечей, поднимаемых 8 сутни., Nc
Рис. VI-15. Затраты времени на подъем колонны
при бесступенчатом и ступенчатом распределении
скоростей.
нении скоростей подъема. Как показано на рис. VI-15, заштрихованные площадки, ограниченные сплошной линией 1, характеризуют потерю времени на машинный подъем при рациональном ступенчатом распределении скоростей по сравнению с временем при бесступенчатом регулировании скорости подъема, определяемого площадью ABCD. Площадки, ограниченные пунктирной линией 2, характеризуют потерю времени при неудачном распределении скоростей. Число площадок равно числу рабочих скоростей.
Потери времени будут тем меньше, чем меньше будет сумма этих площадок, что может быть достигнуто за счет увеличения количества треугольников и равенства их площадей.
Относительная потеря времени на подъем
•V 4
(VI-72)
ABCD
1'де 2/ — сумма площадок потерь времени;
^\bcd — пл°щадь затраты времени при бесступенчатом подъеме.
180
Так как
•** AECD ~ ~2 ' та* win) ^'
где Ф — среднесуточное число подъемов, то число рабочих скоростей подъема,
. -
?, , ™ . » •
1 max I •* mm J
При приводе с автоматическим регулированием соотношение скоростей проще подбирать по геометрическому ряду. Структурный ряд скоростей вращения, построенный по геометрической прогрессии, обеспечивает выгодное в эксплуатационном отношении расположение промежуточных скоростей между выбранными крайними пределами.
Геометрическая структура скоростей в коробках передач с числом валов более двух является единственно закономерной структурой расположения скоростей вращения, которую возможно осуществить конструктивно.
При геометрическом ряде промежуточные скорости выбираются из соотношения:
^ = ^1ф = ад*'1 (VI-74)
или
пя = п*-1ф =' "1Ф*"1. (VI-75)
где vl и п^^— скорость крюка и скорость вращения барабана ле-
бедки на первой передаче; Ф — знаменатель геометрической прогрессии; k — порядковый номер скорости.
„Из (VI-73) следует, что знаменатель прогрессии
= АТ^;, (VI-76)
где k — число рабочих скоростей; Лш — диапазон регулирования.
Величина знаменателя геометрических прогрессий для буровых установок не нормализована и выбирается в пределах 1,3 — 2,3.