

Лекция 4. Матрицы и простейшие операции над матрицами
Матрицей
размера
![]() называется
упорядоченный массив чисел, состоящий
из m
строк и n столбцов.
называется
упорядоченный массив чисел, состоящий
из m
строк и n столбцов.
В
случае равенства строк и столбцов (m=n)
матрица носит название квадратной
матрицы (
![]() ).
).

В
случае, когда
![]() ,
такая матрица называется диагональной.
,
такая матрица называется диагональной.
![]() - такая матрица называется
нулевой.
- такая матрица называется
нулевой.
Матрица
размера
![]() называется вектор- столбец.
называется вектор- столбец.
Матрица
размера (![]() )
называется вектор- строка .
)
называется вектор- строка .
Суммой
матриц А+В=
С
является матрица С,
элементы которой определяются по закону
![]() .
.
Если
в любой матрице строки и столбцы поменять
местами, то получим транспонированную
матрицу
![]() .
.
При
перемножении двух матриц С=А*В
необходимо, чтобы количество столбцов
матрицы А
совпадало с количеством строк матрицы
B (![]() ).
).
Свойства матричных операций:
![]() .
.
Если
![]() ,
то
,
то
![]() ,
,
где
-
соответствующий минор матрицы
![]() .
.
Расчет матрицы податливости упругого элемента в новой базовой системе координат.
В зависимости от выбора системы координат (СК) матрицы податливости и жесткости будут изменять не только численные значения своих элементов, но и структуру.
Относительное положение любых двух прямоугольных систем координат характеризуется линейным смещением начал координат и угловым смещением осей координат.

Рассмотрим
переход из исходной СК (![]() )
в новую СК (
)
в новую СК (![]() )
со смещенным началом координат:
)
со смещенным началом координат:

В
матричной форме вектор
![]() имеет вид:
имеет вид:
![]()
![]() проекции
вектора на оси первой СК.
проекции
вектора на оси первой СК.
Отметим,
что
![]() .
.
Например, в данном рассматриваемом случае:
![]() ,
,
![]() .
.
Лекция 5.
Рассматривается общий случай относительного смещения начал координат двух СК ( и ).
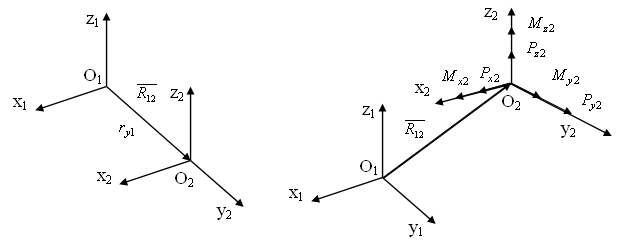
Поместим в нижнем индексе {i} номер системы координат, в которой матрица определяется, тогда уравнение равновесия будет иметь вид
![]() .
(5.1)
.
(5.1)
Здесь
 - матрица жесткости (матрица
коэффициентов из уравнения равновесия
(5.1));
- матрица жесткости (матрица
коэффициентов из уравнения равновесия
(5.1));
![]() ;
;
![]() .
.
При этом
 (5.2)
(5.2)
Так как
![]() ;
;
то векторное выражение (5.2) можно записать в следующем матричном виде:
![]() ;
(5.3)
;
(5.3)
где
 - кососимметричная матрица;
- кососимметричная матрица;
![]() .
.
Заметим далее, что
![]() ;
;
![]() ;
;
![]() . (5.4)
. (5.4)
Распишем в блочном виде уравнение равновесия (5.1):
 ;
;
![]() (5.5)
(5.5)
![]() (5.6)
(5.6)
Выражения (5.5), (5.6) – уравнения равновесия, записанные в первой и второй (исходной и последующей ) системе координат.
Подставим выражения (5.3), (5.4) в уравнение равновесия (5.5):
![]()
Приведем эти уравнения к стандартному виду.
Запишем сначала первое уравнение в виде:
![]() .
.
Подставляем P{2} из первого уравнения в правую часть второго уравнения и переносим соответствующие слагаемые в левую часть второго уравнения:
![]() .
(5.7)
.
(5.7)
Сравнивая коэффициенты при обобщенных перемещениях в полученной системе (5.7) и в исходной системе (5.6), приходим к окончательным формулам расчета матрицы жесткости в новой системе координат со смещенным началом координат:

Аналогично получаем формулы для расчета матричных блоков матрицы податливости в случае смещения начала координат:
