

12.4. Опрацювання результатів вимірювання
1
(3)
ΔΘ = (|ΘСД –ΘСП |В + |ΘСД – ΘСП| н) /2
12.4.2. Зробити висновки по п.п. 4, 5, 6.
12.5. Зміст звіту
Звіт повинен включати назву та мету роботи, схему досліду (рис. 12.2). Таблиці 1, 2, 3 для всіх режимів вимірювання, розрахунок значення абсолютної похибки та висновки по п.п. 3, 4, 5, 6.
12.6. Тестові питання
1. Що таке трансформаторний режим роботи сельсинів?
2. Як впливає момент тертя на точність роботи сельсинів в трансформаторному режимі?
3. Як впливає величина коефіцієнта підсилення Кус на роботу сельсинів в трансформаторному режимі?
4. Пояснити коливання валу СП2.
5. В яких випадках використовують дистанційну систему в трансформаторному режимі?
Лабораторна робота № 13 вивчення передавача дистанційного керування на іч-променях
Мета роботи: вивчення принципу дії комутатора та формувача команд дистанційного керування (ДК).
13.1. Основні теоретичні положення
Система дистанційного керувавші (СДК) на ІЧ-променях використовується в системах телемеханіки та в робототехніці. Структурна схема передавача зображена на рис. 13.1.

Рис. 13.1.. Структурна схема передавача
Схема включає:
- КК — комутатор команд;
- ФК — формувач команд;
- ФІЧ — формувач ІЧ-сигналів, тобто передавач ІЧ-сигналів.
СДК дає можливість формувати:
- вісім незалежних команд;
- по кожній з восьми команд змінити значення первинного параметра в певних проміжках;
- включити або виключити первинний параметр;
- відключити або включити приймач команд.
13.1.1. Комутатор команд (КК)
Комутатор команд має двадцять тактильних датчиків. При цьому датчики 1, 2,... 7,8 (поле І) дозволяють формувати вісім незалежних команд. Кожна з команд має відношення до одного керованого об'єкту, або до восьми різних об'єктів керування. Останні шість тактильних датчиків (поля II) дають можливість по кожному вибраному об'єкту регулювати 3 параметри, а один з параметрів при допомозі чотирьох датчиків (поле III) можна регулювати, а також відключати або включити цей параметр. За допомогою датчика, який має червоний колір можна відключити будь-яку з восьми команд. Зовнішній вигляд комутатора команд показано на рис. 13.2.
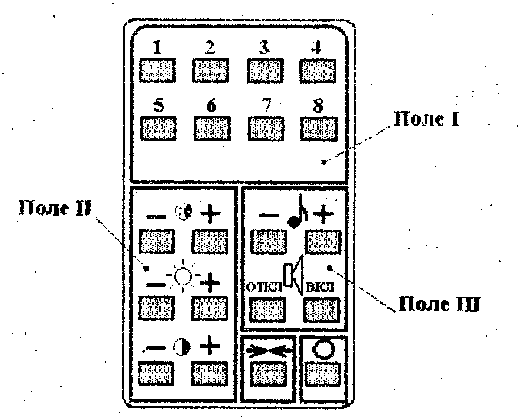
Рис. 13.2. Зовнішній вигляд комутатора команд
13.1.2. Формувач команд (ФК)
Формувач команд виконано на інтегральній мікросхемі (ІМС) типу КР1506ХЛ1, схема якої показана на рис. 13.3.
В режимі мовчання, коли жодна з кнопок (тактильний датчик) не включена на виході "5" ІМС напруга відсутня. При включені однієї з команд кнопка перемикає строкові (10,11,12,13,15) та стовпцеві (16,17,18,19,20,21,22,23) виводи, формуючи при допомозі метриці Σ9 сигнал, що поступає на дешифратор ДС22.2, який формує команду в послідовному коді. Команда в послідовному коді поступає, на перетворювач коду 23, що перетворює код послідовний в паралельний. Підсилений паралельний код підсилювачем l з'являється на виводі 5 ІМС. Перетворювач коду керується дешифратором коду PC 22.1, а також генератором тестових та опорних сигналів за допомогою схем керування Р 24.1. 24.2,.24.3. Таким чином на виході "5" мікросхеми з'являється підсилений сигнал, яким закодовано включену кнопку.