

11.4. Опрацювання результатів виміру
Для отриманих даних по пунктах 2, 3 обчислити абсолютну похибку сельсинної індикаторної передачі кута за допомогою виразу
ΔΘср=(|ΘСД-ΘСП| В + |ΘСД-ΘСП|н) /2 (7)
де "В" і "Н" — напрямок руху сельсинів.
При цьому похибку ΔΘср, знайти при відключених і влючених опорах R3, R4, R5.
11.5. Зміст звіту
Звіт повинен вміщувати назву та мету роботи, схему проведення досліду (рис. 11.2), таблиці 1 та 2, розрахунки абсолютної похибки відпрацювання кута та динамічну похибку.
11.6. Контрольні питання
1. Призначення сильсинів.
2. В чому суть індикаторних режимів.
3. Пояснити похибку, яка спричинена зміною опору лінії зв'язку.
4. Як впливає момент оперу індикаторної дистанційної системи
5. Як пояснити динамічну похибку дистанційної передачі.
Лабораторна робота № 12
ДИСТАНЦІЙНА СЕЛЬСИННА ПЕРЕДАЧАКУТА В ТРАНСФОРМАТОРНОМУ РЕЖИМІ
Мета роботи: вивчення принципів роботи сельсинної системи дистанційної передачі кутав трансформаторному режимі.
12.1. Теоретичні положення
В трансформаторному режимі роботи сельсинів статорні обмотки з'єднуються по схемі "зірка", а напруга знімається з обмотки збудження СП. Схема включення сельсинів в трансформаторному режимі наведена на рис. 12.1.
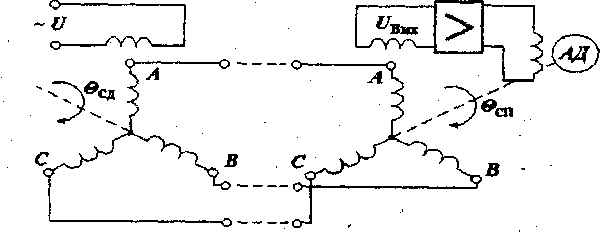
Рис. 12.1. Схема включення сельсинів в трансформаторному режимі.
В трансформаторному режимі напруга живлення подається тільки на обмотку збудження СД. Обмотка збудження СП підключається до входу підсилювача, що керує асинхронний двигуном АД, який переміщує навантаження та вал СП.
Наведені в синхронізуючих обмотках СД електрорушійні сили Есд викликають струми в обмотках синхронізації СП, що призводить до появи магнітного потоку в СП. Якщо кути Θсд= Θсп, то в обмотці збудження СП не з"являється ЕРС. При Θсд = Θсп результуючий вектор магнітного потоку СП повертається на величину кута
ΔΘ = Θсд — Θсп, (1)
що приведе до появи в обмотці збудження СП напруги
Uвих=Uвих.max ·sin ΔΘ, (2)
яка залежить від кута ΔΘ.
Ця напруга підсилюється підсилювачем і спричиняє обертання валу двигуна, який повертає навантаження та вал СП до тих пір, поки ΔΘ = 0, тобто Θсд = Θсп.Фаза вихідної напруги СП (0° або 180°) визначається знаком ΔΘ, що дає можливість за допомогою фазочутливого підсилювача здійснювати реверс двигуна при зміні знаку ΔΘ.
Напруга, при якій двигун починає рухатись, залежить від навантаження на його валу, і при незмінному коефіцієнті підсилення має мінімальне значення Uвих.min. При цьому значенні напруги схема ще буде відпрацьовувати кут ΔΘ. Отже збільшуючи коефіцієнт підсилення ми будемо збільшувати точність роботи схеми.
З іншого боку, величина опору лінії зв'язку також буде впливати на величину Uвих , що буде відбиватись на точності відпрацювання кута Θсп валом СП.