

2. Метод Зейделя.
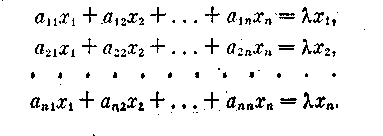
Одним из самых распространенных итерационных методов, отличающихся простотой и легкостью программирования является метод Зейделя. Дана система линейных уравнений (5)
a11x1+a 12 x2+ …+ a13x3 =b1
a21x1+a 22 x2+ …+ a23x3 =b2 (5)
a31x1+a 32 x2+ …+ a33x3 =b3
Р исунок
1- Блок-схема метода итераций
исунок
1- Блок-схема метода итераций
Предположим, что диагональные элементы a11, a 22 ,a33 отличны от нуля. Выразим неизвестные x1, x2, x3 соответственно из первого, второго и третьего уравнений системы (5)
x1=![]() (6)
(6)
x2=![]() (7)
(7)
x3=![]() (8)
(8)
Зададим некоторые начальные (нулевые )приближения значений неизвестных: х1= x01 , х2=x02 , х3= x03 . Подставляя эти значения в правую часть выражения (6), получаем новое (первое ) приближение для х1:
x11=![]()
Используя значение для х1 и приближение x03 для х3 находим из (7) первое приближение для х2:
х12=![]()
И наконец, используя вычисленные значения x1=x11 и х2=x12 находим с помощью выражения (8) первое приближение для х3 :
x1
3=![]()
Используя теперь значения x11, х12, x13 таким же образом провести вторую итерацию в результате которой будут найдены вторые приближения к решению: х1= x21 , х2=x22 , х3= x23 и т.д. Приближение с номером k можно представить в виде:
x1k=![]()
х2
k=![]()
x3
k=![]()
Итерационный процесс продолжается до тех пор пока значения x1k , х2 k , x3 k не станут близкими с заданной погрешностью с значениями x1k-1 , х2 k-1 , x3 k-1.
Итерационный процесс продолжается до тех пор, пока все значения xik не станут близкими к xik-1. Тогда при заданной допустимой погрешности >0 критерий окончания итерационного процесса можно записать в виде
=![]() (9)
(9)
Это
критерий по абсолютным отклонениям.
Можно заменить его критерием по
относительным разностям, т.е. условие
окончания итерационного процесса
записать в виде при |xi|>>1,
тогда
 (10)
(10)
При выполнения условия (9) и (10) итерационный процесс Гаусса-Зейделя называется сходящимся.
Для сходимости итерационного процесса достаточно, чтобы модули диагональных коэффициентов для каждого уравнения системы были не меньше сумм модулей всех остальных коэффициентов:
|
aii|=
![]() , где i=1,2,3,…,
n.
, где i=1,2,3,…,
n.
Блок-схема алгоритма решения n линейных уравнений методом Гаусса-Зейделя представлена на рисунке 2.
Литература. Осн...7 [ 47-51 ], доп. 26 [133-140]
Контрольные вопросы и задачи
1. При каких условиях итерационный процесс Гаусса-Зейделя называется сходящимся?
2. Опишите алгоритм метода Зейделя , итераций ?
3. Назовите формулы окончания итерационного процесса ?
4. Какой процесс называется сходящимся?
Лекция 8.
Тема лекции : Методы решения линейных уравнений состояния электрической систем. Метод Ньютона .Условия сходимости..
Конспект лекции
1. Метод Ньютона . Многие практические задачи сводятся к решению системы нелинейных уравнений. Пусть для вычисления неизвестных x1, х2, ..., хп требуется решить систему п нелинейных уравнений
F 1(x1, х2,, ..., xn) = 0,
……………………. (1)
Fn(x1, x2 , ..., xn) = 0.
В отличие от систем линейных уравнений не существует прямых методов решения нелинейных систем общего вида. Лишь в отдельных случаях систему (1) можно решить непосредственно. Например, для случая двух уравнений иногда удается выразить одно неизвестное через другое и таким образом свести задачу к решению одного нелинейного уравнения относительно одного неизвестного.
Для решения систем нелинейных уравнений обычно используются итерационные методы. Ниже будут рассмотрен метод Ньютона.
Рисунок 2 –
Блок-схема метода Гаусса — Зейделя.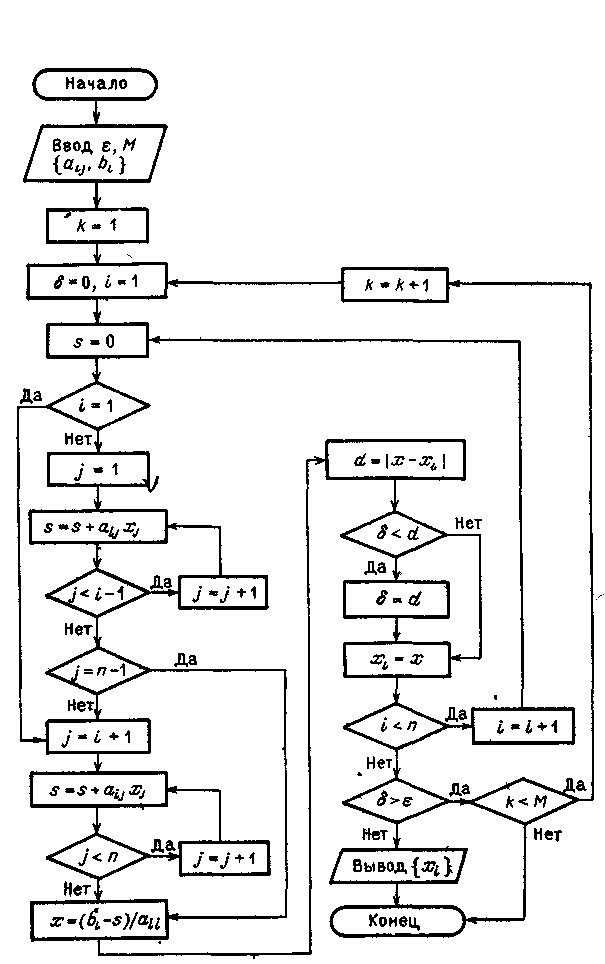
Метод Ньютона. Этот метод обладает гораздо более быстрой сходимостью, чем метод простой итерации. В случае одного уравнения F(x) = 0 алгоритм метода Ньютона был легко получен путем записи уравнения касательной к кривой у = F (х). В основе метода Ньютона для системы уравнений лежит использование разложения функций Fi(xt, х2, ..., хп) в ряд Тейлора, причем члены, содержащие вторые (и более высоких порядков) производные, отбрасываются.
Пусть приближенные значения неизвестных системы (1) (например, полученные на предыдущей итерации) равны соответственно a1, а2, ,.., ап. Задача состоит в нахождении приращений (поправок) к этим значениям xt, х2, ..., хn благодаря которым решение системы (1) запишется в виде
x1 = a1 + х1, х2 = а2 +х2, ... , хп = ап + хп. (2)
Проведем разложение левых частей уравнений (1) с учетом (2) в ряд Тейлора, ограничиваясь лишь линейными членами относительно приращений:
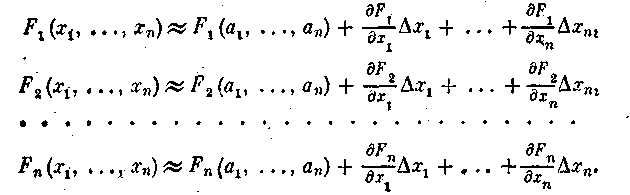
Поскольку в соответствии с (1) левые части этих выражений должны обращаться в нуль, то приравняем нулю, и правые части. Получим следующую систему линейных алгебраических уравнений относительно приращений (3):
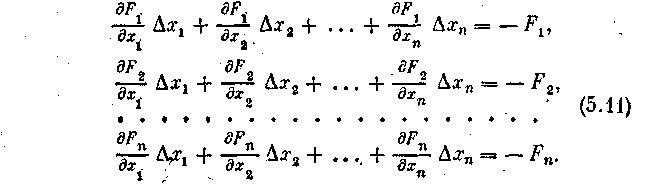
(3)
Значения F1 F2, . .., Fn и их производные вычисляются при x1 = a1, x2 = а2, ..., хп = an.
Определителем системы (3) является якобиан
Д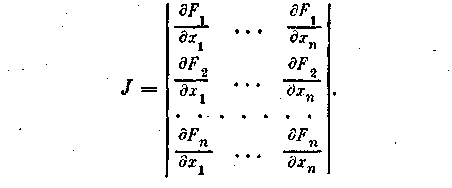 ля
существования единственного решения
системы (3) он должен быть отличным от
нуля на каждой итерации. Таким образом,
итерационный процесс, решения системы
уравнений (1) методом Ньютона состоит в
определении приращений x1,
x2,
..., хn
к значениям неизвестных на каждой
итерации. Счет прекращается, если все
приращения становятся малыми по
абсолютной величине:
ля
существования единственного решения
системы (3) он должен быть отличным от
нуля на каждой итерации. Таким образом,
итерационный процесс, решения системы
уравнений (1) методом Ньютона состоит в
определении приращений x1,
x2,
..., хn
к значениям неизвестных на каждой
итерации. Счет прекращается, если все
приращения становятся малыми по
абсолютной величине:
max | хi [ <. В методе Ньютона также важен удачный выбор начального приближения для обеспечения хорошей сходимости. Сходимость ухудшается с увеличением числа уравнений системы.
В качестве примера рассмотрим использование метода Ньютона для решения системы двух уравнений
F1(x, y) = 0, (4)
F2(х, у) = 0.
Пусть приближенные значения неизвестных равны a, b. Предположим, что якобиан системы (4) при х = а, у = b отличен от пуля, т. е.
Тогда следующие приближения неизвестных можно записать в виде
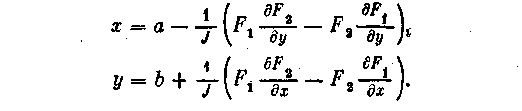
Величины, стоящие в правой части, вычисляются при х = а, у = b.
Блок-схема метода Ньютона для решения системы из двух уравнений изображена на рис. 2. В качестве исходных данных задаются начальные приближения неизвестных а, b, погрешность и допустимое число итераций М. Если итерации сойдутся, то выводятся значения х и у, в противном случае происходит вывод х, у, М.
Метод Ньютона-Рафсона предполагает возможность относительного изменения шага итерации a:
[xn+1] = [xn] - [f '(xn)]-1 [f(xn)] an .
Модифицированный метод Ньютона предполагает замораживание инверсной матрицы производных (инверсного Якобиана) на первом шаге:
[xn+1] = [xn] - [f '(x0)]-1 [f(xn)] .
Но в этом случае наблюдается лишь линейное схождение. Хотя, через несколько итераций, инверсный Якобиан можно обновлять.
Литература Осн. 5[323-329 ] Доп. 26[ 164-168] .
Контрольные вопросы и задачи.
Построить блок-схему решения системы уравнений методом Ньютона.
Используя метод Ньютона, найти с погрешностью 10-3 хотя бы один корень системы уравнений: a) tg (0.55x +0.1) = x3; x3 - 0.2х2 + 0.5х +1.5 = 0.
С помощью метода простой итерации найти с погрешностью 10-3 хотя бы один корень уравнений: а) 5х — 8 In х = 8; б) x2 = sin х.
Расскажите методику нахождения корней системы нелинейных уравнений?
5. Формула метода Ньютона-Рафсона?
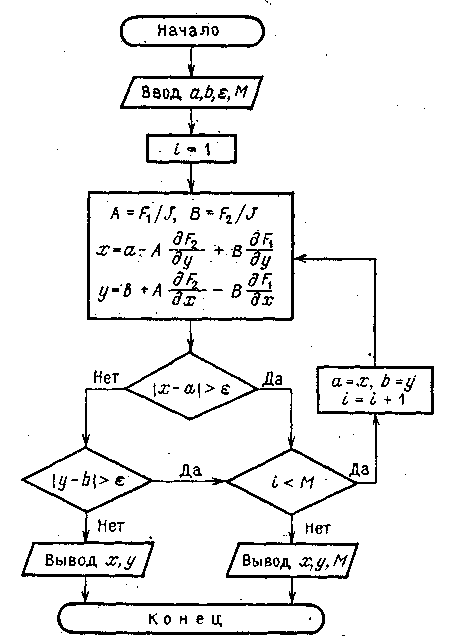
Рисунок 2 –Блок-схема метода Ньютона для системы из двух уравнений
Лекция 9.
Тема лекции : Понятие собственного вектора и собственного значения матрицы
Конспект лекции.
1. Основные понятия. Большое число научно-технических задач, а также некоторые исследования в области вычислительной математики требуют нахождения собственных значений и собственных векторов матриц. Введем некоторые определения, необходимые для изложения материала данного параграфа.
Рассмотрим квадратную матрицу п-го порядка

(1)
Характеристической матрицей С данной матрицы А называется матрица вида

(2)
Здесь — собственное значение, Е — единичная матрица. Определитель матрицы С является многочленом n-й степени относительно :
detC=c0n+ c1n-1 +…+ cn-1+cn (3)
называемым характеристическим многочленом. Корни этого многочлена являются собственными значениями матрицы А.
Вектор X = {x1, х2, ..., хп}, соответствующий некоторому собственному значению и удовлетворяющий системе уравнений
АХ = Х, (4)
называется собственным вектором матрицы А.
Поскольку при. умножении собственного вектора на скаляр он остается собственным вектором той же матрицы, то его можно нормировать. В частности, каждую координату собственного вектора можно разделить на максимальную из них или на длину вектора; в последнем случае получится единичный собственный вектор.
Если перейти к координатной форме записи вектора X, то с учетом (3) систему (4) можно записать в виде
Иногда эту систему уравнений удобно представить в другом виде:
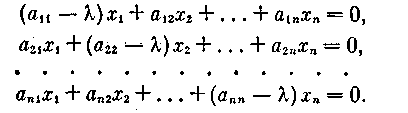
Это уже однородная система п линейных уравнений с п неизвестными. Она имеет ненулевые решения лишь тогда, когда ее определитель равен нулю: det(A — E)= О, причем решение не единственно, поскольку обычно одно уравнение является -следствием остальных.
На практике обычно при нахождении собственных векторов матрицы одну из его компонент полагают равной некоторому числу, например x1 = 1. Остальные компоненты находятся однозначно из подсистемы линейно независимых уравнений, в которой отброшено уравнение, являющееся следствием остальных. Эта процедура не влияет на результат решения задачи, поскольку, как уже отмечалось, собственные векторы находятся с точностью до постоянного множителя.
Пример. Вычислить собственные числа и собственные векторы матрицы
A=![]()
![]()
Решение. Составим характеристический многочлен
|![]()
![]() |=(3-)(4-)-2=2-7+10
|=(3-)(4-)-2=2-7+10
Найдем корни этого многочлена второй степени:
2-7+10= 0, 1 = 2, 2 = 5.
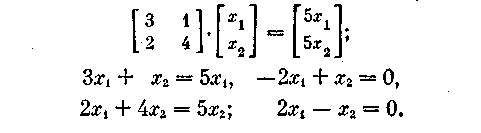
Для нахождения собственных векторов X1, X2, соответствующих собственным значениям 1, 2, составим системы уравнений типа (4) для каждого из них. При
1 = 2 получим
[
]
[![]() ]=[
]=[![]() ]
]
или в виде системы уравнений :
3x1 + x2 = 2x1
2x1 +4x2 = 2x1
Записывая полученную систему в виде
x1 + x2 = 0
x1 + x2 = 0
замечаем, что уравнения линейно зависимы (даже совпадают). Поэтому оставляем лишь одно из них.
Полагаем x1 = 1. Тогда х2 = -x1 = -1, и собственный вектор, соответствующий собственному значению 1 = 2, имеет вид X1 = {1, —1} или X1 = e1 — е2, где e1, е2 — единичные орты выбранной базисной системы.
Аналогично находим второй собственный вектор, соответствующий собственному значению 2 =5 Опуская комментарии, получаем
Отсюда x1 = 1, х2 = 2, X2 = e1 + 2e2.
Вектор X1 нормирован; нормируем также вектор Х2, разделив его компоненты на наибольшую из них. Получим Х2 = 0,5е1 + е2. Можно также привести векторы к единичной длине, разделив их компоненты на значения модулей векторов. В этом случае
![]()
Мы рассмотрели простейший пример вычисления собственных значений и собственных векторов для матрицы второго порядка. Нетрудно также провести подобное решение задачи для матрицы третьего порядка и для некоторых весьма специальных случаев.
В общем случае, особенно для матриц высокого порядка, задача о нахождении их собственных значений и собственных векторов, называемая полной проблемой собственных значений, значительно более сложная.
На первый взгляд может показаться, что вопрос сводится к вычислению корней многочлена (3). Однако здесь задача осложнена тем, что среди собственных значений часто встречаются кратные. И кроме того, для произвольной матрицы непросто вычислить сами коэффициенты характеристического многочлена.
Отметим некоторые свойства собственных значений для частных типов исходной матрицы.
1. Все собственные значения симметрической матрицы действительны.
2. Если собственные значения матрицы действительны и различны, то соответствующие им собственные векторы ортогональны и образуют базис рассматриваемого пространства. Следовательно, любой вектор в данном пространстве можно выразить через совокупность линейно независимых собственных векторов.
3. Если две матрицы A и В подобны, т. е. они связаны соотношением
В = Р -1АР, (5)
то их собственные значения совпадают (здесь Р — некоторая матрица).
Преобразование подобия (5) можно использовать для упрощения исходной матрицы, а задачу о вычислении ее собственных значений свести к аналогичной задаче для более простой матрицы.
Очевидно, самым лучшим упрощением матрицы (1) было бы приведение ее к треугольному виду
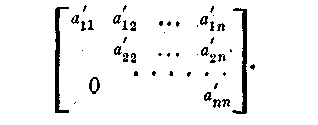
Т![]() огда
матрица (2 )также имела бы треугольный
вид. Как известно, определитель треугольной
матрицы равен произведению ее диагональных
элементов, поэтому характеристический
многочлен (3) в этом случае имеет вид
огда
матрица (2 )также имела бы треугольный
вид. Как известно, определитель треугольной
матрицы равен произведению ее диагональных
элементов, поэтому характеристический
многочлен (3) в этом случае имеет вид
(6)
Собственные значения матрицы, равные корням этого многочлена, можно сразу получить:
![]() (7)
(7)
Таким образом, собственные значения треугольной матрицы равны ее диагональным элементам. То же самое, естественно, относится и к диагональное матрице, которая является частным случаем треугольной.
Некоторые типы матриц удается привести к треугольному виду с помощью преобразования подобия. В частности, симметрическую матрицу можно привести к диагональному виду. На практике часто используется приведение симметрической матрицы к трех диагональному виду. Процедура вычисления собственных значений для полученной матрицы значительно упрощается по сравнению с задачей для исходной матрицы.
Существует ряд методов, основанных на использовании преобразования подобия, позволяющего привести исходную матрицу к более простой структуре. Мы рассмотрим ниже один из них — метод вращений.
2. Метод вращений. Одним из эффективных методов, позволяющих привести исходную симметричную матрицу n-го порядка к трехдиагональному виду, является метод вращений. Он основан на специально подбираемом вращении системы координат в n-мерном пространстве. Поскольку любое вращение можно заменить последовательностью элементарных (плоских) вращений, то решение задачи можно разбить на ряд шагов, на каждом из которых осуществляется плоское вращение. Таким образом, на каждом шаге выбираются две оси — i-я и j-я, и поворот производится в плоскости, проходящей через эти оси; остальные оси координат на данном шаге неподвижны, Матрица вращения при этом
имеет вид
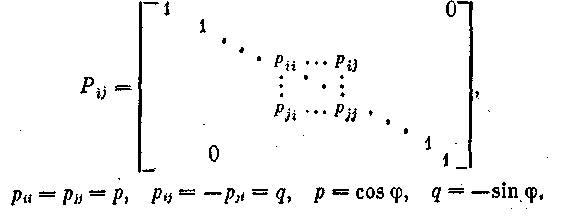
(8)
Здесь мы рассматриваем матрицы с вещественными элементами. В случае комплексных векторов для использования этого метода нужно изменить формулы (8).
Для
осуществления преобразования подобия
(5) необходимо найти обратную матрицу
![]() .
Можно показать, что она равна в
рассматриваемом случае транспонированной
матрице
.
Можно показать, что она равна в
рассматриваемом случае транспонированной
матрице
![]() ,
т.
е. для получения обратной матрицы
достаточно провести зеркальное отражение
всех элементов исходной матрицы
относительно ее диагонали,
,
т.
е. для получения обратной матрицы
достаточно провести зеркальное отражение
всех элементов исходной матрицы
относительно ее диагонали,
Литература Осн. 7 [58-65] , доп.26 [ 140-154 ]
Контрольные вопросы и задачи.
1. Провести геометрический анализ единственности решения системы трех линейных уравнений с тремя неизвестными в зависимости от значения определителя.
2. Элементы треугольной матрицы вводятся построчно в память машины. Составить блок-схему вычисления определителя данной матрицы.
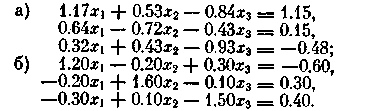
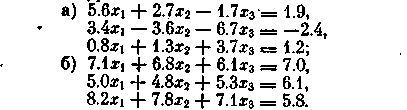
3. Используя метод Гаусса, решить следующие системы уравнений с погрешностью 10-4:
4. Составить блок-схему вычисления обратной матрицы по методу Гаусса. Блок прямого хода можно считать заданным .
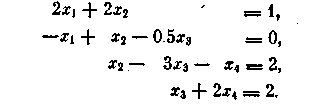
5. С помощью метода прогонки решить систему уравнений
6. Решить методом Гаусса — Зейделя с погрешностью 10-3 системы уравнений:
7. Найти собственные значения и собственные векторы матриц
![]()
8. Составить алгоритм приведения матрицы четвертого порядка к трехдиагональному виду и решения полной проблемы собственных значений.
9. Составить блок-схему вычисления наибольшего собственного значения с помощью итерационного метода.
Лекция 10.
Тема лекции : Линейное программирование. Применение симплекс метода для решения задач энергетики.
Конспект лекции.
Учебно-целевые вопросы:
Общие понятия о методах линейного программирования и определения.
Пример постановки задачи линейного программирования.
Обобщенная и каноническая постановка задачи.
Блок-схема эвристического алгоритма реализации задачи линейного программирования.