

2. Элементы матриц l и u могут быть записаны на месте элементов матриц а и занесены в те же ячейки памяти (запоминать единичные элементы на главной диагонали матрицы u нет необходимости).
3.Если требуется найти решение для другого вектора b в правой части, то не нужно повторно проводить разложение матриц на треугольные, а достаточно только произвести прямую и обратную подстановки.
4. Для уравнений с транспортированной матрицей Аt X = C решение находится при том же LU-разложении. Анализ таких систем уравнений необходим при расчете чувствительности.
2. Обратная матрица
Определение . Матрица B называется обратной матрицей для квадратной A матрицы если AB=BA=E.
Из определения следует, что обратная матрица В будет квадратной матрицей того же порядка, что и матрица А иначе одно из произведений AB или BA было бы не определено). Обратная матрица для матрицы A обозначается A-1 Таким образом, если A-1 существует, то AA-1 =A-1A=E.
Из определения обратной матрицы следует, что матрица A является обратной для матрицы A-1 , то есть (A-1)-1 Про матрицы и можно говорить, что они обратны друг другу или взаимно обратны. Если матрица имеет обратную, то |A|<>0 и |A-1|=|A|-1 Если квадратная матрица А является невырожденной, то обратная для нее существует и
г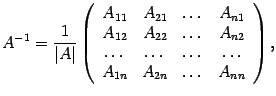 де
Aij
алгебраические дополнения к элементам
aij
де
Aij
алгебраические дополнения к элементам
aij
Квадратную матрицу A назовем вырожденной или особенной матрицей, если |A|=0и невырожденной или неособенной матрицей, если|A|0
Пример: Найдите обратную матрицу для матрицы
Р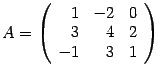 ешение.
Находим определитель
ешение.
Находим определитель
Т ак
как |A|0,
то матрица
А - невырожденная, и обратная для нее
существует
ак
как |A|0,
то матрица
А - невырожденная, и обратная для нее
существует
Находим алгебраические дополнения
С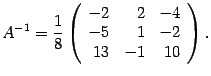 оставляем
обратную матрицу, размещая найденные
алгебраические дополнения так, чтобы
первый индекс соответствовал столбцу,
а второй – строке:
оставляем
обратную матрицу, размещая найденные
алгебраические дополнения так, чтобы
первый индекс соответствовал столбцу,
а второй – строке:
Полученная матрица и служит ответом к задаче
Или
Ч тобы
избежать ошибок следует делать проверку:
вычислить произведение исходной матрицы
на итоговую в том или ином порядке. Если
в результате получится единичная
матрица, то обратная матрица найдена
правильно. В противном случае нужно
искать ошибку.
тобы
избежать ошибок следует делать проверку:
вычислить произведение исходной матрицы
на итоговую в том или ином порядке. Если
в результате получится единичная
матрица, то обратная матрица найдена
правильно. В противном случае нужно
искать ошибку.
3. Обратить матрицу методом разбиения ее на произведение двух треугольных матриц.
Решение состоит из следующих этапов:
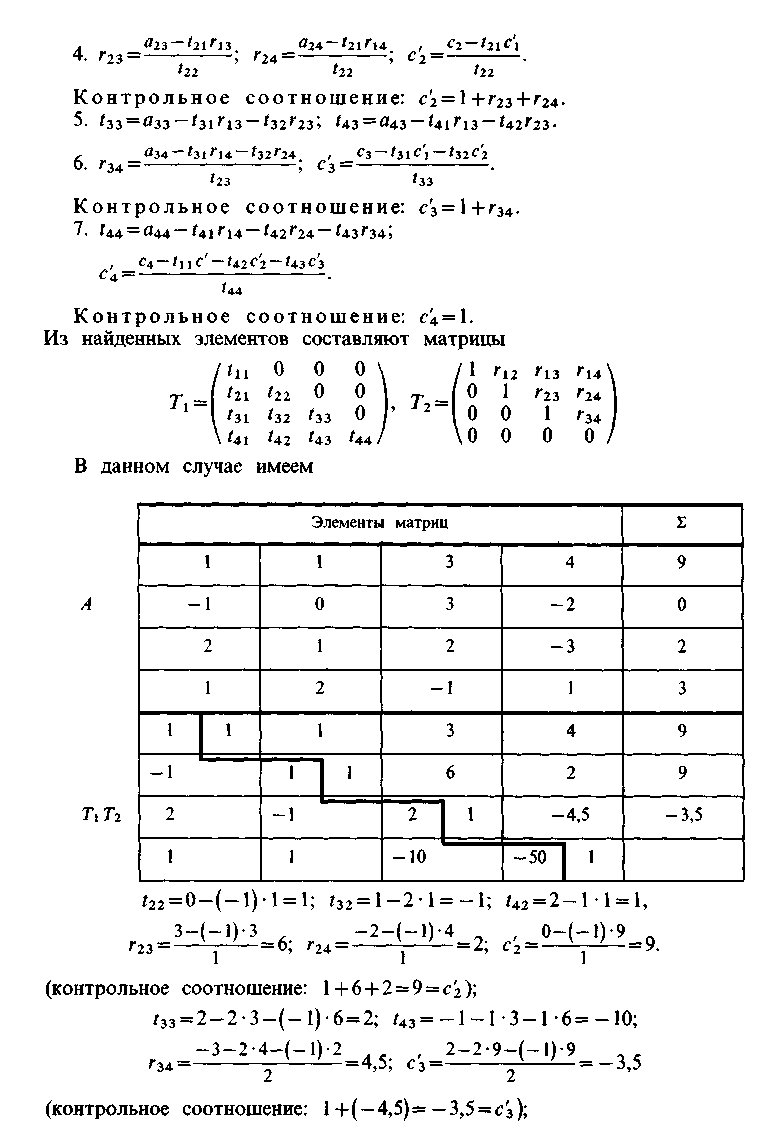
1. Представление матрицы А в виде произведения А=Т1Т2, где Т1 и Т2 – треугольные матрицы
Обращение матриц Т1 и Т2 , т.е. нахождение матриц Т1-1 и Т2-1.
Нахождение искомой матрицы А-1 с помощью умножения найденных м атриц:
А-1= Т1-1 * Т2-1.
Порядок выполнения.
1.Для отыскания матриц Т1 и Т2 используем схему:
-
Элементы матрицы
A
a11a12
a13
a14
c1
a21
a22
a23
a24
c2
a31
a32
a33
a34
c3
a41
a42
a43
a44
c4
Т1 и Т2
t111
r12
r13
r14
c1`
t21
t22
1
r23
r24
c2`
t31
t32
t33
1
r34
c3`
t41
t42
t43
t44
1
c4`
Столбец - является контрольным; числа c1 ,c2 ,c3 ,c4 - строчные суммы;
Элементы схемы находят в следующем порядке:
1. t11=a11; t21=a21; t31=a31 ; t41=a41 ;
2.
r12
=
![]() ; r13
=
; r13
=![]() ;
r14
=
;
r14
=
![]() ;
c1
=
;
c1
=![]()
Контрольное соотношение : c1` = 1+ r12+ r13+ r14
3. t22=a22 - t21r12; t32=a32– t31r12; t42=a42– t41 r12;
4.
r23
=
![]() ; r24
=
; r24
=![]() ;
;
![]() =
=
![]() ;
;
Контрольное
соотношение![]()
5. t33=a33 – t31r13 – t32r23; t43=a43– t41r13 – t42r23 ; t42=a42– t41 r12;
6.
r34
=
![]() ;
;
![]() =
=![]() ;
;
Контрольное
соотношение![]()
7. t44=a44 – t41r14 – t42r24–t43r34;
![]() =
=![]() ;
;
Контрольное
соотношение![]()
Из найденных элементов составляют матрицы
Пусть дана квадратная матрица (1) и пусть Aij - обозначает алгебраическое дополнение элемента aij .Матрица
в строчках которой расположены алгебраические дополнения элементов соответствующих столбцов матрицы А , называется взаимной для А.
Таким образом, взаимная матрица Ã получается из матрицы А заменой каждого элемента на его алгебраическое дополнение с последующим транспонированием. Ясно, что понятие взаимной матрицы имеет смысл для любой квадратной матрицы как особенной, так и не особенной.
Теорема . Для взаимной матрицы Ã квадратной матрицы А n-того порядка мы имеем А Ã= Ã А=Е , где =|E| и Е – единичная матрица n-того порядка.
Литература. Осн...7 [ 54-58], доп. 26 [121-133]
Контрольные вопросы и задачи
1.Запишите выражение для обратной матрицы методом разбиения ее на произведение двух треугольных матриц. Напишите формулы преобразования?
2. Какая матрица называется неособенной матрицей ?
3. Какая матрица называется особенной?
4. Составьте обратную матрицу, используя алгебраические дополнения?
Лекция 7
Тема лекции : Методы решения нелинейных уравнений состояния электрической системы. Метод простой итерации. Метод Зейделя. Условия сходимости решения системы линейных уравнений.
Конспект лекции
1. Итерационные методы расчета. Метод простой итерации
Решение нелинейного уравнения (системы нелинейных уравнений), описывающего (описывающих) состояние электрической цепи, может быть реализовано приближенными численными методами. Решение находится следующим образом: на основе первой, достаточно грубой, оценки определяется начальное значение корня (корней), после чего производится уточнение по выбранному алгоритму до вхождения в область заданной погрешности.
Наиболее широкое применение в электротехнике для численного расчета нелинейных резистивных цепей получили метод простой итерации и метод Ньютона-Рафсона, основные сведения о которых приведены в табл. 1.
Найдем решение системы линейных уравнений
a11x1+a 12 x2+ …+ a1nxn =b1
a21x1+a 22 x2+ …+ a2nxn =b2 (1)
…………………………..
an1x1+a n2 x2+ …+ annxn =bn
Пусть с помощью некоторого прямого метода вычислены приближенные значения неизвестных
x01 , x02 , x03 , x0n . Подставляя эти значения в левые части системы (1) получаем некоторые значения b0 i отличные от bi.
a11x 01+a 12 x 02+ …+ a1xx 0n =b 01
a21x 01+a 22 x 02+ …+ a2xx 0n =b 02 (2)
…………………………..
an1x 01+a n2 x 02+ …+ annx 0n =b 0n
введем обозначения: 0i = погрешности значений неизвестных,
r0i - вязки, т.е. 0i = xi –x 0i ; ri0 = bi-bi0, i=1,2,3,…n (3)
Вычитая каждое уравнение системы (2) из соответствующего уравнения системы (1) с учетом обозначений (3) получаем:
a11 01+a 12 02+ …+ a1n 0n =r 01
a21 01+a 22 02+ …+ a2n 0n = r 02 (4)
…………………………..
an101+a n2 02+ …+ ann 0n = r 0n
Решая эту систему , находим значения погрешностей 0i , которые используем в качестве поправок к решению. Следующие приближения неизвестных имеют вид
х11 = х01 + 01, х11 = x02 + 02 , ……., x1n = x0n + 0n ;
Таким же способом можно найти новые поправки к решению 1i и следующие приближения переменных x2 i = x1i + x1n = x0n + 0n ;и т.д. Процесс продолжается до тех пор, пока все очередные значения погрешностей i не станут достаточно малыми. Блок-схема алгоритма метода итераций.
Таблица 1. Итерационные методы расчета
Последователь-ность расчета |
Геометрическая иллюстрация алгоритма |
Условие сходимости итерации |
Примечание |
|
1.Исходное нелинейное уравнение электрической цепи f(X)=0 , где –x искомая переменная, представляется в виде x=h(x). 2. Производится расчет по алгоритму xm+1=h(xm), где m=1,2,3,..
|
Здесь - заданная погрешность |
На интервале между приближенным и точным значениями корня должно выполняться неравенство
|dh(x)/dx|<1 |
1.Начальное приближение x0 обычно находится из уравнения f(x)=0 при пренебрежении в нем нелинейными членами. 2. Метод распространим на систему нелинейных уравнений n-го порядка. Например, при решении системы 2-го порядка x1=h(x1, x2); итерационные формулы имеют вид ; x1(m+1)=h1(x1m, x2m); x2(m+1)=h2(x1m, x2m); 3. При решении системы уравнений сходимость обычно проверяется в процессе итерации. |
|
-Рафсона 1. На основании исходного нелинейного уравнения электрической цепи f(x)=0, где x -искомая переменная, записывается итерационная формула xm+1= xm- f(xm)/f (xm), где m=1,2,3… - шаг итерации. 2.По полученной формуле проводится итерационный расчет
|
Здесь - заданная погрешность |
На интервале между приближенным и точным значениями корня должны выполняться неравенства
|df(x)/dx|<>0 d2f(x)/dx2<>0 Примечания п. 1,2 и 3 к методу простой итерации распространимы на метод Ньютона-Рафсона. При этом при решении системы f1(x,y)=0 f2(x,y)=0 |
2-го порядка итерационные формулы имеют вид
где
|
|
 Метод
простой итерации
Метод
простой итерации Метод
Ньютона-
Метод
Ньютона-Рассмотренный процесс уточнений решения представляет фактически итерационный метод решения системы линейных уравнений, причем на каждой итерации решаются системы линейных уравнений вида (4) с одной и той же матрицей (1), при разных правых частях. Решение систем уравнений с помощью рассмотренного метода сводится к следующему алгоритму:
вводятся коэффициенты уравнений
допустимое значение погрешности
начальные приближения значений неизвестных