

Топологические матрицы
Задать вычислительной машине топологию цепи рисунком затруднительно, так как не существует эффективных программ распознавания образа. Поэтому топологию цепи вводят в ЭВМ в виде матриц, которые называют топологическими матрицами. Выделяют три таких матрицы:
узловую матрицу,
контурную матрицу
и матрицу сечений.
1. Узловая матрица (матрица соединений) – это таблица коэффициентов уравнений, составленных по первому закону Кирхгофа. Строки этой матрицы соответствуют узлам, а столбцы – ветвям схемы.
Для графа на рис. 3 имеем число узлов m=4 и число ветвей n=6. Тогда запишем матрицу АН , принимая, что элемент матрицы aij (i –номер строки; j –номер столбца) равен 1, если ветвь j соединена с узлом i и ориентирована от него, -1, если ориентирована к нему, и 0, если ветвь j не соединена с узломi . Сориентировав ветви графа на рис. 3, получим

.Данная матрица АН записана для всех четырех узлов и называется неопределенной. Следует указать, что сумма элементов столбцов матрицы АН всегда равна нулю, так как каждый столбец содержит один элемент +1 и один элемент -1, остальные нули.
Обычно при расчетах один (любой) заземляют. Тогда приходим к узловой матрице А (редуцированной матрице), которая может быть получена из матрицы АН путем вычеркивания любой ее строки. Например, при вычеркивании строки “4” получим
.Число строк матрицы А равно числу независимых уравнений для узлов ,
т.е. числу уравнений, записываемых для электрической схемы по первому закону Кирхгофа. Итак, введя понятие узловой матрицы А, перейдем к первому закону Кирхгофа.
Первый закон Кирхгофа
Обычно первый закон Кирхгофа записывается для узлов схемы, но, строго говоря, он справедлив не только для узлов, но и для любой замкнутой поверхности, т.е. справедливо соотношение
![]()
(1)
где - вектор плотности тока; dS- нормаль к участку dS замкнутой поверхности S.
Первый закон Кирхгофа справедлив и для любого сечения. В частности, для сечения S2 графа на рис. 3, считая, что нумерация и направления токов в ветвях соответствуют нумерации и выбранной ориентации ветвей графа, можно записать
П![]() оскольку
в частном случае ветви сечения сходятся
в узле, то первый закон Кирхгофа справедлив
и для него. Пока будем применять первый
закон Кирхгофа для узлов, что математически
можно записать, как:
оскольку
в частном случае ветви сечения сходятся
в узле, то первый закон Кирхгофа справедлив
и для него. Пока будем применять первый
закон Кирхгофа для узлов, что математически
можно записать, как:
(2)
![]()
т.е. алгебраическая сумма токов ветвей, соединенных в узел, равна нулю.
При этом при расчетах уравнения по первому закону Кирхгофа записываются для (m-1) узлов, так как при записи уравнений для всех m узлов одно (любое) из них будет линейно зависимым от других, т.е. не дает дополнительной информации.
Введем матрицу – столбец токов ветвей
![]()
= I
Тогда первый закон Кирхгофа в матричной форме записи имеет вид:
АI=0 (3)
– где 0 - нулевая матрица-столбец. Как видим, в качестве узловой взята матрица А, а не АН, т.к. с учетом вышесказанного уравнения по первому закону Кирхгофа записываются для (m-1) узлов.
В качестве примера запишем для схемы на
рис. 3
качестве примера запишем для схемы на
рис. 3
О тсюда
для первого узла получаем
тсюда
для первого узла получаем
ч![]() то
и должно иметь место.
то
и должно иметь место.
2. Контурная матрица (матрица контуров) – это таблица коэффициентов уравнений, составленных по второму закону Кирхгофа. Строки контурной матрицы В соответствуют контурам, а столбцы – ветвям схемы.
Элемент bij матрицы В равен 1, если ветвь j входит в контур i и ее ориентация совпадает с направлением обхода контура, -1, если не совпадает с направлением обхода контура, и 0, если ветвь j не входит в контур i.
Матрицу В, записанную для главных контуров, называют матрицей главных контуров. При этом за направление обхода контура принимают направление ветви связи этого контура. Выделив в нашем примере (см. рис. 5) дерево, образуемое ветвями 2-1-4, запишем коэффициенты для матрицы В.

Перейдем теперь ко второму закону Кирхгофа.
Под напряжением на некотором участке электрической цепи понимается разность потенциалов между крайними точками этого участка, т.е.
![]()
(4)
Просуммируем напряжения на ветвях некоторого контура:

Поскольку при обходе контура потенциал каждой i-ой точки встречается два раза, причем один раз с “+”, а второй – с “-”, то в целом сумма равна нулю.
Таким образом, второй закон Кирхгофа математически записывается, как:
![]()
(5)
и
 имеет место следующую формулировку:
алгебраическая сумма напряжений на
зажимах ветвей (элементов) контура
равна нулю. При этом при расчете цепей
с использованием законов Кирхгофа
записывается независимых уравнений
по второму закону Кирхгофа,
имеет место следующую формулировку:
алгебраическая сумма напряжений на
зажимах ветвей (элементов) контура
равна нулю. При этом при расчете цепей
с использованием законов Кирхгофа
записывается независимых уравнений
по второму закону Кирхгофа,
т.е. уравнений, записываемых для контуров, каждый из которых отличается от других хотя бы одной ветвью. Значение топологического понятия “дерева”: дерево позволяет образовать независимые контуры и сечения и, следовательно, формировать независимые уравнения по законам Кирхгофа. Таким образом, с учетом (m-1) уравнений, составленных по первому закону Кирхгофа, получаем систему из
![]()
уравнений, что равно числу ветвей схемы и, следовательно, токи в них находятся однозначно.
Введем столбцовую матрицу напряжений ветвей
![]()
U=
Тогда второй закон Кирхгофа в матричной форме записи имеет вид
BU = 0. (6)
В качестве примера для схемы рис. 5 имеем

откуда, например, для первого контура получаем
ч![]() то
и должно иметь место.
то
и должно иметь место.
Если ввести матрицу-столбец узловых потенциалов

=
причем потенциал последнего узла =0 , то матрица напряжений ветвей и узловых потенциалов связаны соотношением
U=AТ (7)
где AТ - транспонированная узловая матрица.
Для определения матрицы В по известной матрице А=АДАС , где АД – подматрица, соответствующая ветвям некоторого дерева, АС- подматрица, соответствующая ветвям связи, может быть использовано соотношение В= (-АТС А-1Т Д1).
3. Матрица сечений – это таблица коэффициентов уравнений, составленных по первому закону Кирхгофа для сечений. Ее строки соответствуют сечениям, а столбцы – ветвям графа.
Матрица Q , составленная для главных сечений, называется матрицей главных сечений. Число строк матрицы Q равно числу независимых сечений.
Элемент qij матрицы Q равен 1, если ветвь входит в i-е сечение и ориентирована согласно направлению сечения (за положительное направление сечения принимают направление ветви дерева, входящей в него), -1, если ориентирована противоположно направлению сечения, и 0, если ветвь j не входит в i-е сечение.
В качестве примера составим матрицу Q
главных сечений для графа на рис. 5. При
указанной на рис. 5 ориентации ветвей
имеем
качестве примера составим матрицу Q
главных сечений для графа на рис. 5. При
указанной на рис. 5 ориентации ветвей
имеем
В заключение отметим, что для топологических матриц А, В и Q, составленных для одного и того же графа, выполняются соотношения
АВТ= 0; (8)
QВТ= 0, (9)
которые, в частности, можно использовать для проверки правильности составления этих матриц. Здесь 0 – нулевая матрица порядка 0 .
Приведенные уравнения позволяют сделать важное заключение: зная одну из топологических матриц, по ее структуре можно восстановить остальные.
Понятие о параметрах модели
Параметры модели
Физические величины, которые характеризуют модель независимо от ее текущего динамического состояния. К параметрам относятся: сопротивления1 (электрическое, магнитное, термальное, гидравлическое, механическое, акустическое, ротационное, и т.д.); отношения сопротивлений (коэффициенты передачи); меры инерционности (постоянные времени).
1) Если речь идет о сопротивлениях реактивного характера, то в качестве параметров могут выступать физические величины их определяющие (например, индуктивность катушки, емкость конденсатора, и т.д.).
Выбор шага симуляции и метода интегрирования
Шаг симуляции
Фундаментальный параметр процесса симуляции компьютерной модели. Равен интервалу между временными значениями, для которых вычисляются все координаты модели (т.е. рассчитывается весь поток процедур и функций реализующий модель).
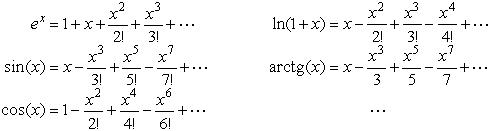
При компьютерном моделировании существенными следует считать четыре источника погрешности:
Трансцендентные функции, которые вычисляются компьютерным путем аппроксимации полиномиальными или степенными рядами:
Д
 искретный
квазианалог интегратора (блок 1/S).
искретный
квазианалог интегратора (блок 1/S).
Итерационный решатель (тот или иной классический алгоритм, предназначенный для решения алгебраических уравнений путем подбора независимых переменных до заданной точности).
Математический сопроцессор компьютера, чья дискретная природа требует округлений, которые, в свою очередь, обычно проявляются в виде шума при дифференцировании меняющихся в большом диапазоне параболических сигналов n-ого порядка.
Литература основ. 11[1-100], доп. 21[1-528]
Контрольные вопросы и задачи
1. Сформулируйте основные топологические понятия для электрических цепей.
2. Что такое узловая матрица?
3. Что такое контурная матрица?
4. Что такое матрица сечений?
5![]() .
Токи ветвей некоторой планарной цепи
удовлетворяют следующей полной системе
независимых уравнений:
.
Токи ветвей некоторой планарной цепи
удовлетворяют следующей полной системе
независимых уравнений:
Восстановив граф цепи, составить матрицы главных контуров и сечений, приняв, что ветвям дерева присвоены первые номера.

Ответ:
6. Составить матрицу главных контуров для графа на рис. 3, приняв, что дерево образовано ветвями 2, 1 и 5
Ответ:

B=
7. Решить задачу 5, используя соотношения (8) и (9).
Лекция 5.
Тема лекции : Методы решения линейных уравнений Понятие точных и приближенных методов решений линейных алгебраических уравнений. Применение метода Гаусса в матричной форме, Крамера и т.д Достоинства и недостатки
Конспект лекции
Решение системы линейных алгебраических уравнений методом Гаусса. Пусть дана система m линейных уравнений с n неизвестными Ax=b Требуется найти ее общее решение, если она совместна, или установить ее несовместность. Предлагаемый алгоритм называется методом Гаусса или методом последовательного исключения неизвестных. Выпишем расширенную матрицу системы
Н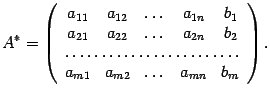 азовем
элементарными операциями следующие
действия с матрицами:
азовем
элементарными операциями следующие
действия с матрицами:
перестановка строк;
умножение строки на число, отличное от нуля;
сложение строки с другой строкой, умноженной на число.
Отметим, что при решении системы уравнений, в отличие от вычисления определителя и нахождения ранга, нельзя оперировать со столбцами.
Если по матрице, полученной из A* выполнением элементарной операции, восстановить систему уравнений, то новая система будет равносильна исходной.
Цель алгоритма -- с помощью применения последовательности элементарных операций к матрице A* добиться, чтобы каждая строка, кроме, быть может, первой, начиналась с нулей, и число нулей до первого ненулевого элемента в каждой следующей строке было больше, чем в предыдущей.
Шаг
алгоритма заключается в следующем.
Находим первый ненулевой столбец в
матрице A*.
Пусть это будет столбец с номером i
Находим в нем ненулевой элемент и строку
с этим элементом меняем местами с первой
строкой. Чтобы не нагромождать
дополнительных обозначений, будем
считать, что такая смена строк в матрице
А* уже произведена, то есть a1i0.
Тогда ко второй строке прибавим первую,
умноженную на число![]() ,
к третьей строке прибавим первую ,
умноженную на число
,
к третьей строке прибавим первую ,
умноженную на число
![]() ,
и т.д.
,
и т.д.
В результате получим матрицу
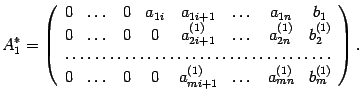
(Первые нулевые столбцы, как правило, отсутствуют.)
Если в матрице A*1 встретилась строка с номером k, в которой все элементы a(1)kj равны нулю, а bk(1)0 то выполнение алгоритма останавливаем и делаем вывод, что система несовместна
Д![]() ействительно,
восстанавливая систему уравнений по
расширенной матрице, получим, что k-ое
уравнение будет иметь вид
ействительно,
восстанавливая систему уравнений по
расширенной матрице, получим, что k-ое
уравнение будет иметь вид
Этому уравнению не удовлетворяет ни один набор чисел x1,x2,x3,…xk.
М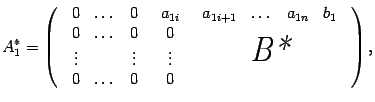 атрицу
A*1
можно записать в виде
атрицу
A*1
можно записать в виде
где
П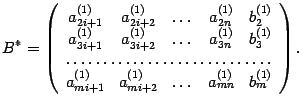
 о
отношению к матрице B*
выполняем
описанный шаг алгоритма. Получаем
матрицу
о
отношению к матрице B*
выполняем
описанный шаг алгоритма. Получаем
матрицу
Где j>i, a2j(2)<>0. Эту матрицу можно записать в виде.
И к матрице С* снова применим описанный выше шаг алгоритма
Процесс останавливается, если после выполнения очередного шага новая уменьшенная матрица состоит из одних нулей или если исчерпаны все строки. Заметим, что заключение о несовместности системы могло остановить процесс и ранее.
Если бы мы не уменьшали матрицу, то в итоге пришли бы к матрице вида
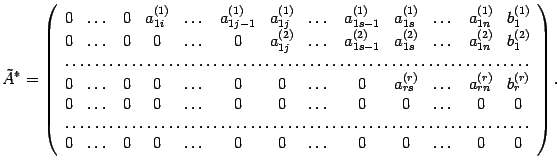
Далее
выполняется так называемый обратный
ход метода Гаусса. По матрице
![]() составляем систему уравнений. В левой
части оставляем неизвестные с номерами,
соответствующими первым ненулевым
элементам в каждой строке, то есть xi,
xj,
xr.
. Заметим, что r=RgA.
Остальные неизвестные переносим в
правую часть. Считая неизвестные в
правой части некоторыми фиксированными
величинами, несложно выразить через
них неизвестные левой части.
составляем систему уравнений. В левой
части оставляем неизвестные с номерами,
соответствующими первым ненулевым
элементам в каждой строке, то есть xi,
xj,
xr.
. Заметим, что r=RgA.
Остальные неизвестные переносим в
правую часть. Считая неизвестные в
правой части некоторыми фиксированными
величинами, несложно выразить через
них неизвестные левой части.
Теперь, придавая неизвестным в правой части произвольные значения и вычисляя значения переменных левой части, мы будем находить различные решения исходной системы Ax=b . Чтобы записать общее решение, нужно неизвестные в правой части обозначить в каком-либо порядке буквами С1,…,Сn-r. включая и те неизвестные, которые явно не выписаны в правой части из-за нулевых коэффициентов, и тогда столбец неизвестных можно записать в виде столбца, где каждый элемент будет линейной комбинацией произвольных величин С1,…,Сn-r. (в частности, просто произвольной величиной Ck). Эта запись и будет общим решением системы.
Если система была однородной, то получим общее решение однородной системы. Коэффициенты при C 1 взятые в каждом элементе столбца общего решения, составят первое решение из фундаментальной системы решений, коэффициенты при C 2 второе решение и т.д.
Фундаментальную систему решений однородной системы можно получить и другим способом. Для этого одному переменному, перенесенному в правую часть, нужно присвоить значение 1, а остальным – нули. Вычислив значения переменных в левой части, получим одно решение из фундаментальной системы. Присвоив другому переменному в правой части значение 1, а остальным - нули, получим второе решение из фундаментальной системы и т.д.
Решение системы линейных алгебраических уравнений методом Крамера
Процедура решает неоднородную систему n линейных алгебраических уравнений с n неизвестными:
a11 x1+a12 x2+ . . .+a1n xn=a1n+1
a21 x1+a22 x2+ . . .+a2n xn=a2n+1
. . . .
an1 x1+an2 x2+ . . .+ann xn=ann+1
Процедура позволяет найти корни, если определитель основной матрицы A=(aij) не равен нулю. Для нахождения i-го корня ищем определитель:
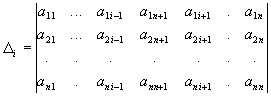
для всех i=1..n. Тогда
![]()
В результате получим: если система не имеет решения, то S=0; если система имеет решения S=1, а массив X содержит решения системы. В процедуре вызывается функция вычисления определителя, в качестве которой можно использовать функцию или другую имеющуюся у Вас.
Решение системы линейных алгебраических уравнений методом Халецкого.
Для удобства рассуждений систему запишем в матричном виде:
Ax=b
где A=[aij]- квадратная матрица порядка n,
- векторы столбцы. Представим матрицу A в виде произведения нижней треуголной матрицы B=(bij) и верхней треугольной матрицы C=(cij) с единичной диагональю, т.е.
A=BC
тогда искомый вектор x может быть вычислен из цепи уравнений
By=b, Cx=y
так как матрицы В и C - треугольные, то системы легко решаются.
Процедура не проверяет имеет ли система решение.
Решение системы линейных алгебраических уравнений методом Гаусса.
Процедура решает неоднородную систему n линейных алгебраических уравнений с n неизвестными:
a11 x1+a12 x2+ . . .+a1n xn=a1n+1
a21 x1+a22 x2+ . . .+a2n xn=a2n+1
. . . .
an1 x1+an2 x2+ . . .+ann xn=ann+1
Вначале находим отличный от нуля коэффициент при x1. Соответствующее уравнение переставляем с первым (если это необходимо). Получаем систему с a11 отличным от нуля. Разделив коэффициенты этого уравнения на a11, получим:
x1+b12 x2+ . . .+b1n xn=b1n+1
При помощи этого уравнения исключаем x1 из исходной системы:
a(1)22 x2+a(1)23 x3+ . . .+a(1)2n xn=a(1)2n+1
. . . .
a(1)n2 x2+a(1)n3 x3+ . . .+a(1)nn xn=a(1)nn+1
где
a(1)i j=ai j-ai 1b1 j, i,j= 2...n
Полученная система содержит n-1 уравнение. Применяем описанную выше процедуру к этой системе. Операции повторяем требуемое число раз, пока не приведем систему к треугольному виду:
x1+с12 x2+ . . .+с1n xn=с1n+1
x2+ . . .+c2n xn=c2n+1
. . . .
xn=cnn+1
Теперь легко определить xn,xn-1, . . ., x1.
Если det(A)=0, то исходная система не имеет решений и процедура выдает S=0 иначе S=1 и решения находятся в массиве X.
Решение системы линейных алгебраических уравнений методом Гаусса с частичным выбором главного элемента
Процедура решает неоднородную систему n линейных алгебраических уравнений с n неизвестными:
a11 x1+a12 x2+ . . .+a1n xn=a1n+1
a21 x1+a22 x2+ . . .+a2n xn=a2n+1
. . . .
an1 x1+an2 x2+ . . .+ann xn=ann+1
В отличии на каждом шаге мы ищем не просто отличный от нуля коэффициент при xk, а максимальный из них по абсолютной величине, в остальном практически также схема приведения системы к треугольному виду:
с11x1+с12 x2+ . . .+с1n xn=с1n+1
с22x2+ . . .+c2n xn=c2n+1
. . . .
сnnxn=cnn+1
Если det(A)=0, то исходная система не имеет решений и процедура выдает S=0 иначе S=1 и решения находятся в массиве X. Выбор на каждом шаге максимального по абсолютной величине коэффициента, позволяет получить малые невязки при решении системы.
Решение системы линейных алгебраических уравнений методом вращений.
Вновь решаем систему n линейных уравнений Ax=b. Вначале приведем матрицу A к нижне-треугольному виду преобразованиями вращения:
A=L*Rn-1 n ... R1 2
здесь L - нижняя треугольная матрица (т.е. элемент li j=0, если j > i), а Ri j - матрица вращения. Матрица вращения это "почти единичная" матрица у которой ri i=rj j=cos(u), и ri j=-rj i=sin(u). Действительно нетрудно проверить, что умножая, например, матрицу 2-го порядка
| cos(u) sin(u)|
R= | |
|-sin(u) cos(u)|
на некоторый вектор x, мы осуществим поворот этого вектора на угол u относительно начала координат. Заметим, что определитель матрицы врщения равен 1, и Ri j*RTi j=E, т.е. обратная матрица совпадает с транспонированной.
Итак представив исходную матрицу в виде произведения нижней треугольной матрицы на последовательность матриц вращения, мы можем решить вначале систему Ly=b, а затем систему Rn-1 n ... R1 2x=y. Первая система легко решается благодаря простому виду матрицы L, а вторую систему нетрудно разрешить, благодаря свойствам матрицы вращения.
Несколько слов непосредственно о реализации алгоритма. Вначале последовательно для каждого ненулевого элемента расположенного выше главной диагонали матрицы A находится преобразование вращения, которое переводит его в нуль. Для хранения преобразование вращения Ri j достаточно хранить соответствующий угол u, но проще хранить t=tg(2u), тогда
cos(u)=(1-t2)/(1+t2)
sin(u)=2t/(1+t2)
В результате последовательности преобразований, в массиве A будет, непосредственно матрица L(a[i,j]=li j, i≥j; li j=0, i< j) и соответствующие преобразование Ri j (a[i,j]=ti j, i<j, здесь ti j - тангес удвоенного угла вращения для преобразования Ri j). Теперь решаем вначале систему Ly=b, а затем из вектора y, получаем решения исходной системы обращая преобразования вращения.
Решение системы линейных алгебраических уравнений методом отражений.
Вновь решаем систему n линейных уравнений Ax=b. Вначале приведем матрицу A к верхнетреугольному виду преобразованиями отражений:
Qn-1 ... Q2*Q1*A*S = R,
здесь Qi - соответствующие матрицы отражения, S -результирующая матрица перестановок, R - верхняя треугольная матрица.
Теперь решив треугольную систему
R*Y=Qn-1 ... Q2*Q1*b
нетрудно определить решение исходной системы
X=S*Y
Чуть подробнее о реализации алгоритма. Вначале находим преобразования отражения, применяя их к матрице A и вектору b. Затем решаем полученную систему, помещая решение в вектор X, и, наконец, переставляем элементы вектора X используя вектор S, который содержит информацию о перестановках в исходной матрице A.
Литература. Осн...7 [ 41-47 ], доп. 26 [121-133]
Контрольные вопросы и задачи
В чем заключаются преимущества использования матричных методов расчета?
В чем заключается сущность метода Гаусса?
Запишите формулу расчета по методу Гаусса ?
4. Что означает прямой и обратный ход Гаусса?
Лекция. 6
Тема лекции : Применение метода обратной матрицы при решении систем линейных уравнений. Представление обратной матрицы в виде простейших сомножителей. Критерий сходимости.
Конспект лекции