

Вопрос 5. В какой сар входными воздействиями управляющего устройства являются только внешние воздействия, т.Е. В них не осуществляются контроль управляемой величины?
a) В замкнутой САР;
б) В разомкнутой САР;
в) В комбинированной САР.
Вопрос 6. В какой сар на вход управляющего устройства поступают как внутренние, так и внешние воздействия ?
a) В замкнутой САР;
б) В разомкнутой САР;
в) В комбинированной САР.
Лекция 15.
Тема лекции : Понятие передаточной функции системы Передаточные функции замкнутой и разомкнутой системы.
Конспект лекции
Передаточная функция элемента или системы - это отношение лапласова изображения соответствующей выходной величины к лапласову изображению входной величины.
При этом считается, что элемент или система находились при нулевых начальных условиях. Следовательно, передаточная функция элемента или системы получается из лапласова преобразования левой и правой частей соответствующего дифференциального уравнения при нулевых начальных условиях, т.е. при условии, что элемент или система находилась при t<0 в состоянии покоя. Таким образом, передаточная функция имеет вид
![]() , (1)
, (1)
где
![]()
![]()
Из сказанного выше вытекает, что если имеется линейное дифференциальное уравнение с постоянными коэффициента и с левой частью вида (2) и если в этом уравнении сделать простую замену символа дифференцирования на оператор Лапласа в соответствующей степени, то получим выражение
![]() (2)
(2)
y(р) и x(р) вынесем за скобки
 (3)
(3)
из полученного выражения найдем чему будет равен у(р)
 .
(4)
.
(4)
Как видно из уравнения (4), коэффициент при Х(р) и будет являться передаточной функцией. Это дробно-рациональная функция от независимого переменного p. Знаменатель передаточной функции является левой частью уравнения системы, а знаменатель - правой частью.
 .
.![]() (5)
(5)
Заменив в уравнении (4) коэффициент при Х(р) на обозначение передаточной функции W(p), получим обобщенную запись дифференциального уравнения в операторном виде
![]() .
(6)
.
(6)
Это означает, что если известены входая величина системы и ее передаточная функция, то вегда тем или иным способом можно найти выходную величину.
1. Соединение звеньев, звенья с обратной связью
Зная передаточные функции отдельных звеньев системы, можно построить структурную схему системы и по ней определить ее передаточную функцию. В системах автоматического регулирования применяются три основных типа соединения звеньев: параллельное, последовательное и обратное.
Параллельное соединение. При параллельном соединении звенья имеют общий вход, а их выходные величины суммируются.
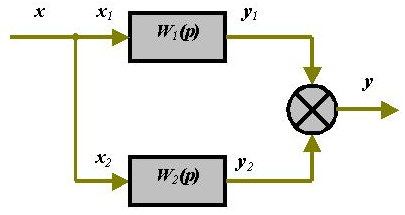
Рис.1. Структурная схема параллельно соединенных звеньев
Передаточная функция такой системы будет равна сумме передаточных функций отдельных звеньев.
![]() .
(7)
.
(7)
Последовательное соединение. При последовательном соединении звенья образуют цепочку, в которой выходная величина каждого из предыдущих звеньев является входной величиной для последующего звена.
W1(p)
W2(p)
x x1 y1 x2 y2 y


Рис. 2. Структурная схема последовательно соединенных звеньев
Передаточная функция
такой системы будет равна произведению
передаточных функций отдельных звеньев.
![]() .
(8)
.
(8)
Комбинированное соединение. Знание правил последовательного и параллельного соединения звеньев позволяет быстро получить передаточную функцию любой сложной комбинированной системы.
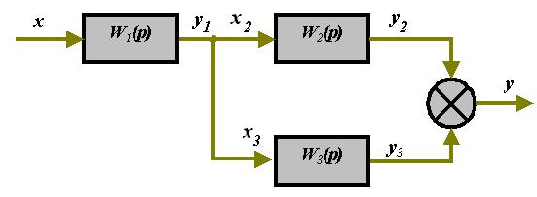
Рис. 3 Комбинированная структурная схема
![]() (9)
(9)
Система с обратной связью. В этом случае звено подключают навстречу одному или нескольким звеньям. Часть величины с выхода звена подается на его вход или на вход одного из предыдущих звеньев. Звено, подключенное таким образом, называются звеном с обратной связью
( ОС), а всю схему схемой с обратной связью. В зависимости от того, складывается переменная на выходе звена обратной связи с входной переменной или вычитается из нее, обратную связь называют соответственно положительной или отрицательной.
x(p) y(p)
xос
ос
Рис. 4. Структурная схема системы с обратной отрицательной связью
Передаточная функция такой системы имеет вид:
![]() .
(10)
.
(10)
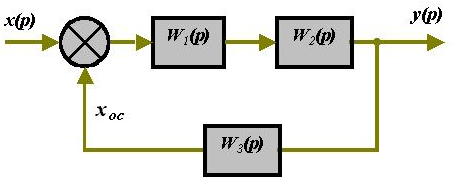
Рис.5. Структурная схема системы с обратной положительной связью
В этом случае звено подключают навстречу одному или нескольким звеньям. Часть величины с выхода звена подается на его вход или на вход одного из предыдущих звеньев.
Передаточная функция такой системы имеет вид:
![]() (11)
(11)
2.. Статистические и динамические характеристики объекта
Любая установка, любой технологический процесс как объект регулирования, кроме номинальных (базовых) параметров, определяется соответствующими характеристиками в статистическом и динамическом режимах.
Статическая характеристика объекта представляет собой зависимость регулируемого параметра (выходной величины) от регулирующего параметра (входной величины). Эта зависимость в общем виде записывается так:
![]() (12)
(12)
где: Y- выходная величина;
X - входная величина.
Если выходная величина зависит еще и от некоторых других величин, то объект автоматического регулирования описывается семейством статистических характеристик.
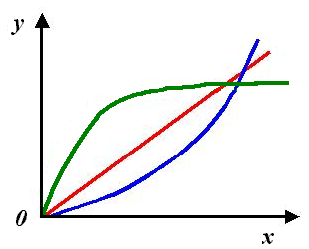
Статистические характеристики разных объектов отличаются друг от друга. Если они могут быть описаны линейными дифференциальными уравнениями, то такие объекты называются линейными. Для ряда объектов статистические характеристики нелинейны, что существенно усложняет математическое исследование их статистических свойств и САР в целом. С целью упрощения математического исследования нелинейные статистические характеристики часто заменяют на каком-либо участке линейными. Такую замену выполняют методом касательной или среднего наклона и называют линеаризацией.
|
Рис. 6. Статические характеристики
|
Динамическая характеристика – это зависимость изменения выходной величины во времени под воздействием изменения входной величины.
|
Рис.7. Динамическая характеристика
|
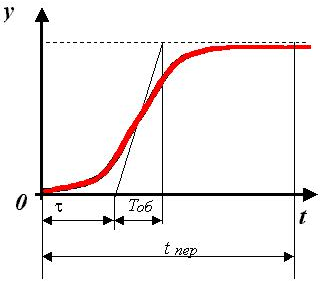
Динамическая характеристика, вызванная скачкообразным изменением входной величины, называется переходной характеристикой или кривой разгона. По переходной характеристике можно определить ее параметры:
![]() -
время переходного процесса,
-
время переходного процесса,
![]() -
постоянную времени объекта,
-
постоянную времени объекта,
![]() -
коэффициент передачи объекта,
-
коэффициент передачи объекта,
![]() - время запаздывания,
- время запаздывания,
и получить математическую модель объекта, если он является сравнительно простым, т.е. описывается дифференциальными уравнениями не выше второго порядка.
Время переходного процесса – это промежуток времени от начала изменения входной величины до момента, когда выходная величина после изменения приходит к новому установившемуся значению.
Постоянная времени – это условное время, за которое выходная величина достигла бы нового установившегося значения, если бы она изменялась с максимальной и постоянной скоростью для данного переходного процесса. Постоянная времени определяется как проекция касательной на ось времени, проведенной к точке максимального изменения выходной величины от оси времени до нового установившегося значения выходной величины.
Коэффициент
передачи объекта
– это отношение изменения выходной
величины
![]() к изменению входной величины
к изменению входной величины
![]() .
.
![]() (13)
(13)
Время запаздывания – промежуток времени от начала изменения входной величины до начала изменения выходной величины.
Запаздывания, возникающие в объектах, можно разделить на передаточные и переходные.
Передаточное (транспортное, чистое) запаздывание характеризуется временем, в течение которого входная величина проходит путь от места своего изменения до места приложения своего воздействия.
Переходное (емкостное) запаздывание зависит от тепловых, гидравлических и других свойств объектов, в том числе и различных сопротивлений, возникающих между емкостями объекта. Оно характеризуется временем, которое потребуется на преодоление инерционных свойств объекта или межемкостных сопротивлений.
Запаздывания отрицательно сказывается на качестве регулирования. Двухемкостные и многоемкостные объекты обладают передаточным и переходным запаздыванием, одноемкостные – только передаточным.
Литература Осн. [53-60, 117-120] доп.14[50-70]
Контрольные вопросы
Вопрос 1. В каких САР создают две цепи воздействий - по заданию и по возмущению и управляющее воздействие формируется согласно оператору y(t) = Aз[(t)] + Aв[f(t)]?
a) В замкнутых САР;
б) В разомкнутых САР4
в) В комбинированных СА.
Вопрос 2. Как называется обратная связь которая действует как во время переходного процесса так и во время установившегося процесса ?
a) Отрицательная обратная связь;
б) Положительная обратная связь;
в) Гибкая обратная связь;
г) Жесткая обратная связь.
Вопрос 3. Как называется обратная связь, которая при увеличении сигнала на выходе элемента передает на его вход воздействие вызывающее уменьшение выходного сигнала ?
a) Отрицательная обратная связь;
б) Положительная обратная связь;
в) Гибкая обратная связь;
г) Жесткая обратная связь.
Вопрос 4. Как называется обратная связь, которая действует только во время переходного процесса, а во время установившегося процесса ее действия прекращаются ?
a) Отрицательная обратная связь;
б) Положительная обратная связь;
в) Гибкая обратная связь;
г) Жесткая обратная связь.
Вопрос 5. Как называется обратная связь, которая с увеличением сигнала на выходе элемента передает на его вход сигнал вызывающий последующее увеличение сигнала на выходе ?
a) Отрицательная обратная связь;
б) Положительная обратная связь;
в) Гибкая обратная связь;
г) Жесткая обратная связь.
Вопрос 6. Какие схемы отражают взаимодействие устройств, узлов, элементов систем автоматики в процессе их работы ?
a) Функциональная схема;
б) Структурная схема;
в) Принципиальная схема;
г) Монтажная схема.
Вопрос 7. Как называется изменение выходной величины во времени при подаче на вход единичного ступенчатого воздействия ?
a) Ступенчатой функцией;
б) Импульсной функцией;
в) Передаточной функцией;
г) Переходной функцией.
Вопрос 8. В качестве какого стандартного воздействия используют обычно сигнал синусоидальной функции описываемый функцией:
x(t) = x(m) sin(wt).
a) Гармоническое воздействие;
б) Линейное воздействие;
в) Ступенчатое воздействие;
г) Импульсное воздействие.
Вопрос 9. Как называют режим работы системы при котором управляемая величина у не изменяется во времени, т.е.: y(t) = const.
a) Динамический режим.
б) Статический режим.
в) Переходной режим.
г) Неустановившийся режим.