

По принципу регулирования По цели регулирования
По количеству регулируемых величин
По характеру сигналов в регуляторе
Рис. 1.3. Классификация систем автоматического регулирования по основным признакам
I) По приципу регулирования:
1) Разомкнутые САР, в них регулирование осуществляется по заданному значению (рис. 2.4) или возмущению f (рис. 2.5).
Преимущество таких САР – большое быстродействие, недостаток – не контролируется регулируемый параметр и поэтому невысокая точность регулирования. Зная величину возмущающего воздействия, регулятор заранее вносит регулирующее воздействие U.

Рис. 1.4. Функциональная схема разомкнутой САР
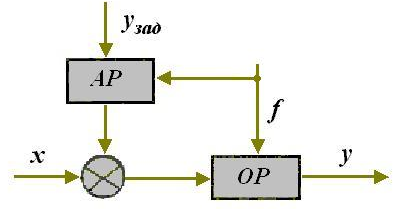
Рис. 1.5. Функциональная схема разомкнутой САР с коррекцией по
возмущающему воздействию
Замкнутые САР – регулирование осуществляется по отклонению регулируемого параметра от заданного значения (рис. 2.6). Такие САР называются еще САР с обратной связью (положительной или отрицательной).
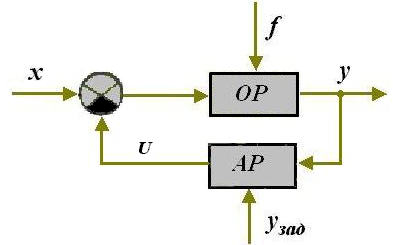
Рис. 1.6. Функциональная схема замкнутой САР
Преимущество – точность регулирования, недостаток – в контуре регулирования имеется запаздывание, т.е. не высокое быстродействие.
3) Комбинированные САР – состоят из автоматических регуляторов, которые воздействуют на объект и по «возмущению» и по «отклонению», т.е. обладают преимуществами разомкнутых и замкнутых САР.
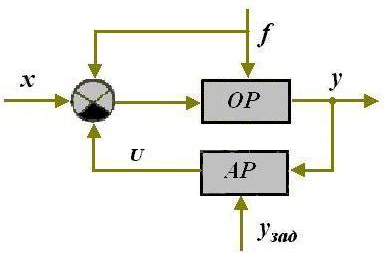
Рис. 1.7. Функциональная схема комбинированной САР
По характеру задающего воздействия сар делятся на:
Системы стабилизации, в них задающее воздействие постоянно.
Системы программного управления – задающее воздействие изменятся по заранее заданному заказу или программе.
Следящие системы – в них задающее воздействие изменяется в зависимости от изменения регулируемого параметра.
В зависимости от характера действия устройств, входящих в систему регулирования, различают:
Непрерывные системы - они состоят только из звеньев непрерывного действия, т.е. из таких звеньев, в которых выходная величина изменяется плавно при плавном изменении входной величины.
С гармоническим модулированным сигналом - они включают элементы, у которых входной и выходной величинами является переменное напряжение (или ток) некоторой частоты о, называемой несущей частотой. При подаче на этот элемент воздействия напряжение (или ток) модулируется, т.е. в простейшем случае его амплитуда и фаза изменяются соответственно значению и знаку передаваемого воздействия. Такие системы рассмотрены в работах [20, 22].
Дискретные системы - они содержат хотя бы одно звено дискретного действия, выходная величина которого изменяется скачками при плавном изменении входной величины.
IV) По способу математического описания сар делятся на:
1) Линейны системы – они описываются линейными дифференциальными уравнениями любого порядка. К линейным системам применим принцип суперпозиции. Принцип суперпозиции заключается в том, что реакция системы на любую сумму внешних воздействий равна сумме реакций на каждое из этих воздействий, поданных на систему порознь.
2) Нелинейные системы – они описываются нелинейными дифференциальными уравнениями, к таким системам принцип суперпозиции неприменим. Нет и общей методики решения нелинейных дифференциальных уравнений. Трудность исследования нелинейных систем заставляет упрощать их описание приближенными линейными уравнениями хотя бы в некоторых режимах. Этот прием называется линеаризацией нелинейных систем.
V) По способности к самоприспосаблению, т.е. способности системы автоматически изменять закон регулирования и параметры регулятора в зависимости от изменения внешних условий работы, системы АР делятся на:
1) Адаптивные системы находят и поддерживают оптимальный в некотором смысле режим работы САР.
2) Системы с переменной структурой меняют свою структуру в зависимости от изменения внешних условий.
3) Обыкновенные системы не обладают способностью к самоперестройке.
VI) По количеству входных и выходных величин различают:
Одномерные САР
Многомерные САР
VII) По числу цепей различают:
Одноконтурные САР.
Многоконтруные САР.
1.3. Основные свойства САР
Под основными свойствами САР понимается устойчивость системы, и качество процессов регулирования.
Устойчивость – это способность системы возвращаться в установившееся состояние после того, как она была выведена из этого состояния каким-либо возмущением.
Качество процесса регулирования характеризуется тем, насколько этот процесс близок к желаемому.
Количественно качество определяется с помощью специально выбранных критериев.
Для того чтобы создать САР и определить ее свойства, необходимо составлять математическую модель системы.