

1. Основные понятия систем автоматического регулирования (сар)
Основные понятия и определения САР
Классификация САР
Основные свойства САР
Функциональные и структурные схемы
Математические модели САР
Понятие о передаточной функции
1.1. Основные понятия и определения сар
Системой автоматического регулирования называется замкнутая динамическая система, состоящая из объекта регулирования ОР и автоматического регулятора АР, предназначенного без участия человека поддерживать необходимый режим в объекте регулирования.
Любой технологический процесс, протекающий в какой либо производственной установке (объекте), можно характеризовать одним или несколькими показателями. Такими показателями обычно бывают самые различные механические, физические или химические параметры (температура, давление, расход, скорость, размер, состав и т.д.).
Параметры объекта, которые характеризуют состояние объекта и подлежат стабилизации или изменению по определенному закону, называются регулируемыми параметрами или выходными величинами ( y ).
Параметры, воздействуя на которые можно менять состояние объекта и, соответственно, получать нужное значение регулируемого параметра, называются регулирующими или входными величинами ( x ).
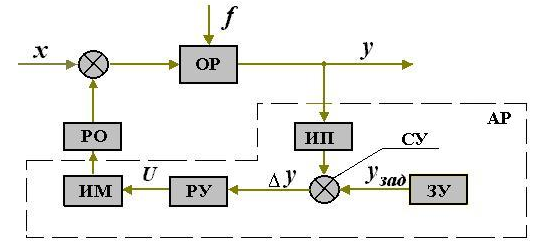
Рис. 1.1. Функциональная схема системы автоматического регулирования
ОР – объект регулирования; РО – регулирующий орган; ИП - измерительный преобразователь; СУ – сравнивающее устройство; ЗУ – задающее устройство; РУ – регулирующее устройство; ИМ – исполнительный механизм; АР – автоматический регулятор.
Параметры, которые по разным причинам не поддаются воздействию со стороны человека (автоматические устройства), но влияющие на состояние объекта и вызывающие необходимость регулирования, называются внешними возмущающими воздействиями ( f ).
![]() .
(2.1)
.
(2.1)
Задающее воздействие ( yзад ) – содержит информацию о требуемом значении регулируемого параметра, т.е. цель регулирования.
Регулирующее воздействие( U ) - вырабатывается в регулирующем устройстве РУ на основе закона регулирования и разницы ∆y между заданным и текущим значениями регулируемого параметра.
При составлении функциональных и структурных схем систем автоматики применяются условные обозначения логических функций сложения и вычитания. Они показывают, что происходит с сигналами, особенно, когда на вход одного и того же устройства поступает несколько сигналов.
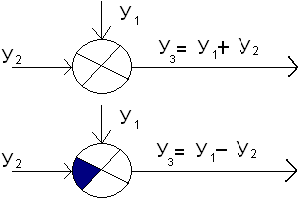
- условное изображение логиче-ской функции сложения
- условное изображение логиче-ской функции сложения
Рис. 2.2. Логические условные обозначения
1.2. Классификация сар
Существует большое многообразие классификаций систем автоматического регулирования, но многие классификации проведены по второстепенным признакам и различиям (по физической природе сигналов в регуляторе, по конструкции и общеинженерным свойствам и т.д.). Более существенно классификацию САР провести по принципу их динамических свойств и точности их действия (рис. 2.3).
