

Лекция 1.
Тема лекции : Введение. Математические методы для анализа установившихся режимов электрической системы. Основные понятия и определения Электрическая система, параметры системы и параметры режима. Общие сведения о переходных процессах в электрических системах и процессах. Виды переходных процессов.
Конспект лекции
Основные понятия и определения
В настоящем курсе изучаются процессы, появляющиеся в электрической системе при изменении условий ее работы, т. е. переходные процессы.
Электрической системой называется условно выделенная часть электроэнергетической системы, в которой генерируется, преобразуется, передается и потребляется электрическая энергия.
Электрическая система представляет собой совокупность взаимодействующих элементов, которые можно разбить на две группы:
силовые элементы — вырабатывающие (например, генераторы), преобразующие (трансформаторы, выпрямители, инверторы), передающие и распределяющие (линии передач, сети) и потребляющие (нагрузки) электрическую энергию;
элементы управления — регулирующие и изменяющие состояние системы (регуляторы возбуждения синхронных машин, регуляторы частоты, реле, выключатели и т. п.).
Все элементы системы связаны единством процессов генерирования, передачи, распределения и потребления электрической энергии и1 процессов, появляющихся при изменении состояния системы.
При изучении работы электрических систем необходимо рассматривать не только электрические процессы, обусловленные упомянутыми выше основными функциями системы, но и затрагивать связанные с ними механические процессы в элементах системы: процессы в первичных двигателях (турбинах) и их автоматических регуляторах, в двигателях нагрузки, где электрическая энергия, получаемая из распределительной сети системы, преобразуется в механическую. Таким образом, необходимо рассматривать электромеханические процессы в электрической системе.
Следует отметить, что система, объединяющая отдельные элементы, имеет свойства, не выявляющиеся у отдельных элементов. Процессы, происходящие в системе, могут существенно отличаться от процессов, происходящих в ее элементах.
Режим системы.. Совокупность процессов, существующих в системе и определяющих ее состояние в любой момент времени, или на некотором интервале времени, называется режимом системы.. Режим — это состояние системы, определяющееся множеством различных процессов и зависящее от схемы соединения элементов системы.
Режим характеризуется показателями, количественно определяющими условия работы системы. Эти показатели называются параметрами режима.
Относится термин «режим» к некоторому интервалу времени, обычно указывают величину или другие признаки этого интервала (например, режим... «после отключения короткого замыкания»... «до срабатывания релейной защиты от повышения напряжения» и т. п.).
К ним относятся значения мощности, напряжения, тока, углов сдвига векторов э. д. с., напряжений, токов, частоты и т. д. Параметры режима связаны между собой соотношениями, в которые входят параметры системы.
Параметры системы — это показатели, количественно определяющиеся физическими свойствами элементов системы, схемой их соединений и рядом допущений расчетного характера. К параметрам системы относятся значения полных сопротивлений, активных и реактивных сопротивлений, проводимостей элементов, собственных и взаимных сопротивлений, коэффициентов трансформации, постоянных времени, коэффициентов усиления и т. д.
Например, ток в сопротивлении R
I=U/R
гдеI и U — параметры режима; R — параметр системы.
Ток в ветви сложной системы определяется параметрами режима (э. д. с. ei, ..., еk) и проводимостями у11, у 12, •••, у1к, являющимися параметрами системы:
I = Eiy11 + E2y12+ ... + Eky1k
Ряд параметров системы может зависеть от ее режима, поэтому система будет нелинейной. Однако, если параметры этой системы можно полагать не изменяющимися, считая систему линейной. Случаи, когда нелинейность, обусловленную изменением параметров системы при изменениях режима, необходимо учесть, будут специально оговариваться.
Другой вид нелинейности изучаемой системы, который часто приходится учитывать, обусловлен характером соотношений между параметрами ее режима.
Например, мощность связана квадратичной зависимостью с напряжением и синусоидальной— с углом расхождения векторов напряжений по концам передачи:
P=U2/R; P=U1U2 * SIN /X
где R, х — параметры системы; Р, U, 6 — параметры режима.
Режим электрической системы может быть установившимся или переходным (неустановившимся).
В установившемся режиме реальной электрической системы параметры режима не постоянны; они непрерывно изменяются, но эти изменения, происходящие около некоторого среднего значения, могут быть настолько малыми, что режим практически допустимо считать установившимся.
Виды режимов. Различают следующие основные виды режимов электрических систем:
нормальные установившиеся режимы, применительно к которым проектируется электрическая система и определяются основные технико-экономические характеристики;
нормальные переходные режимы, во время которых система переходит от одного рабочего состояния к другому;
аварийные установившиеся и переходные режимы, для которых определяются технические характеристики, связанные с необходимостью ликвидации аварии и выяснения условий дальнейшей работы системы;
после аварийные установившиеся режимы вызывают в общем случае изменение нормальной схемы системы, например отключение
Соответственно различают и процессы, хотя здесь различие более условно, так как природа процесса не зависит от того, является он нормальным или аварийным.
какого-либо элемента системы или ряда элементов. В после аварийном режиме система может работать с несколько ухудшенными технико-экономическими характеристиками по сравнению с нормальным режимом.
Переходные процессы
В любых переходных процессах происходят закономерные последовательные изменения параметров режима системы, вызванные какими-либо причинами, называемыми возмущающими воздействиями, создающими начальные отклонения параметров режима — возмущения режима.
Переходный процесс, начавшийся в момент возмущения режима, в линейной системе теоретически длится бесконечно долго. Поэтому практически считают, что переходный процесс закончился и наступил установившийся режим, если характеризующая его изменяющаяся величина (параметр) отличается от своего установившегося значения на некоторую конечную величину, принятую в данных условиях за весьма малую.
При решении инженерных задач рассматривают не все многообразие процессов, составляющих данный режим, а только те из них, которые непосредственно относятся к изучаемому вопросу. Так, при рассмотрении переходных режимов в данном курсе внимание сосредоточивается на нормальных и аварийных переходных электромеханических процессах.
Нормальные переходные процессы сопровождают текущую эксплуатацию системы. Они связаны в основном с изменениями нагрузки системы и реакцией на них регулирующих устройств. Эти процессы возникают при обычных эксплуатационных операциях: включении и отключении трансформаторов и отдельных линий электропередач; нормальных эксплуатационных изменениях схемы коммутации системы; включении и отключении отдельных генераторов и нагрузок или изменениях их мощности. При нормальной эксплуатации системы всегда имеются некоторые малые возмущающие воздействия, вызывающие малые возмущения режима, например изменения нагрузки. Следовательно, соответствующие действия регулирующих устройств происходят непрерывно.
Это означает, что строго неизменного режима в системе не существует, и, говоря об установившемся режиме, в сущности всегда имеют в виду режим малых возмущений. При этом предполагают, что отклонения параметров режима, связанные с этими возмущениями, происходят около некоторого условно принятого исходного равновесного состояния. Система должна быть устойчива при этих малых возмущениях. Иначе говоря, она должна обладать статической устойчивостью.
Статическая устойчивость — это способность системы восстанавливать исходный режим после малого его возмущения или режим, весьма близкий к исходному (если возмущающее воздействие не снято).
Нормальные переходные процессы при больших возмущениях и аварийные переходные процессы возникают вследствие резких и существенных изменений режима системы: при коротких замыканиях в системе и последующем их отключении; при соответствующем изменении схемы соединения системы, например, при случайном (аварийном) отключении агрегатов или линий электропередач, несущих значительные нагрузки при нормальном включении или отключении линий с большой зарядной мощностью, при включении генераторов методом самосинхронизации. Это и приводит к значительным отклонениям параметров режима от их исходного состояния, при которых необходимо учитывать нелинейности системы. По отношению к большим возмущениям вводят понятие динамической устойчивости системы.
Динамическая устойчивость — это способность системы восстанавливать после большого возмущения исходное состояние или практически близкое к исходному (допустимому по условиям эксплуатации системы).
Если после большого возмущения синхронная работа системы сначала нарушается, а затем после некоторого допустимого по условиям эксплуатации перерыва восстанавливается, то система считается имеющей результирующую устойчивость. Этот вид устойчивости иногда считают разновидностью динамической устойчивости, различая синхронную динамическую устойчивость и результирующую динамическую устойчивость .
Инженеру надо уметь рассчитывать процессы, предсказывая по изменениям параметров системы количественные изменения ее режима; надо уметь устанавливать, когда и какие воздействия должны получать элементы системы от регулирующих устройств для того, чтобы переходный процесс носил желательный характер.
Предметом изучения являются взаимосвязанные переходные электромагнитные и механические — электромеханические — процессы в электрических системах и установившиеся режимы, предшествовавшие переходным процессам и заканчивающие их.
Режим автоматизированной системы — это непрерывный ряд отдельных переходных процессов, в которых активно участвуют автоматические устройства, реагирующие на возмущения режима системы и в свою очередь вызывающие ответные реакции системы. Знание характера переходных процессов, появляющихся после возмущений, оказывается, таким образом, необходимым для оценки действия устройств автоматического регулирования при нормальных условиях их работы.
К числу элементов электрической системы, влияющих на переходные процессы и подлежащих рассмотрению в нашем курсе, следовательно, относятся и устройства автоматического регулирования.
Для настоящего курса существенно прежде всего то, что процессы, происходящие во взаимосвязанных элементах электрических систем, изучаются как единое целое.
Виды переходных процессов
При переходах системы от одного режима (состояния) к другому происходит изменение количества энергии, связанной с электрической или электромеханической цепью в ее первоначальном состоянии. Это явление, единое по своей природе, при анализе рассматривается состоящим из ряда процессов, каждый из которых отражает изменение определенной группы параметров режима. Рассматривать эти изменения нужно, строго говоря, во времени и одновременно в пространстве (например, распространение волн напряжения и тока вдоль длинных линий, кабелей, обмоток машин, трансформаторов). Рассматривая факторы, решающим образом влияющие на протекание процесса, удается упростить решение задачи. При этом можно различать переходные процессы по ряду признаков:
по причинам возникновения или по видам возмущающих воздействий и видам возмущений.
Под возмущениями при этом понимаются отклонения параметров режима, происходящие в начале переходного процесса в связи с появлением новых, т. е. не проявлявшихся ранее факторов, изменяющих (возмущающих) режим. Эти факторы, являющиеся причиной возмущений, называют возмущающими воздействиями;
по допущениям, сделанным при составлении и решении дифференциальных уравнений, т. е. различать их по математическому описанию;
по скорости протекания этих процессов в системе *;
по структуре исследуемой системы.
При рассмотрении причин возникновения переходных процессов можно различать: или реальные физические причины переходного процесса; или, независимо от этих физических причин, большие возмущения, изменяющие исходную систему на какое-то время и нарушающие ее исходный режим; или малые возмущения, которые проявляются во время нормальной работы системы.
Градация переходных процессов по допущениям, сделанным при математическом их описании, особенно многогранна, поэтому здесь придется ограничиться только наиболее существенными признаками. Так, анализ реальной нелинейной системы может проводиться с учетом имеющихся нелинейностей (всех или части) или при замене нелинейных зависимостей параметров режима линейными. В этом случае рассматриваемую систему называют линеаризованной. Примером линеаризации может быть замена синусоидальной зависимости мощности от угла Р — КР sin пропорциональной зависимостью Р = КРа, где а — коэффициент линеаризации.
Таким образом, выявляются две существенно различные по постановкам и исходным допущениям задачи: исследование переходных процессов в линеаризованных системах и исследование переходных процессов с учетом нелинейности.
В линеаризованных системах характер протекающих процессов не зависит от их интенсивности (рис. 2.1) и, следовательно, принципиальной
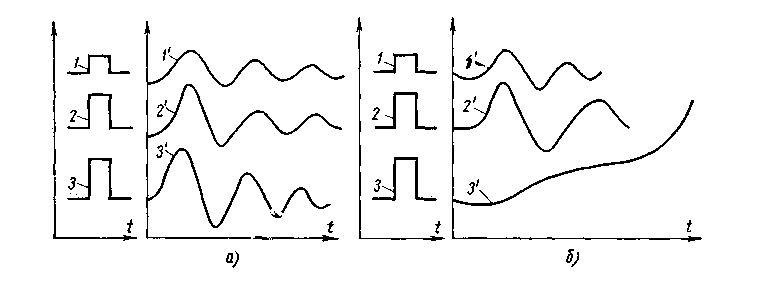
Рис. 2.1. Реакция на возмущения линейной и нелинейной систем:
а — линейная; б — нелинейная: 1, 2, 3 — толчки (возмущения), различные по величине; 1', 2', 3' — характер изменения параметров режима системы
разницы между статической и динамической устойчивостью не будет. При исследованиях таких систем можно применять метод наложения (суперпозиции), при котором сложный процесс, вызываемый двумя или .несколькими независимыми воздействиями, рассматривается как сумма отдельных процессов, каждый из которых вызван своим воздействием.
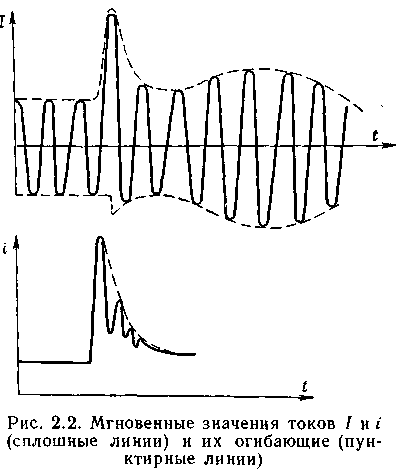
Ряд допущений, принимаемых при исследованиях электромеханических переходных процессов, основывающихся на методах электротехники, механики, теории колебаний, имеет свои существенные особенности. Так, в электрических системах переменного тока электрическая энергия вырабатывается, передается и распределяется с помощью синусоидально изменяющихся токов и напряжений. Рассматривая переходный процесс, можно оперировать с этими мгновенными (через каждую сотую секунды при частоте 50 гц изменяющими свое направление) значениями тока и напряжения и составлять применительно к ним уравнения.
Однако изучение более медленно протекающих электромеханических процессов часто можно упростить, отказавшись от рассмотрения изменений мгновенных значений параметров режима и учитывая только изменения их огибающих (рис. 2.2). Такое упрощение, оказывается, возможно, так как электромеханические процессы в электрических системах, связанные с изменениями скоростей вращения роторов генераторов и количества электромагнитной энергии, запасенной в элементах системы протекают значительно медленнее.
Нужно заметить, что в некоторых случаях, например при очень протяженных передачах (более 1000 км) и при применении быстродействующих устройств (например, регуляторов возбуждения, действующих в зависимости от изменения первой и второй производных регулируемых величин), может появиться необходимость в одновременном рассмотрении электромеханических и волновых процессов. Применение быстрого регулирования гидротурбин может привести к необходимости учета волновых процессов в трубопроводах одновременно с рассмотрением переходных электромеханических процессов. Однако пока практической необходимости в точных решениях,, учитывающих одновременно волновые, электрические и механические распределенные параметры, не возникало. При расчете сверхдлинных электропередач должны специально выявляться случаи, когда учет распределенности параметров подлежит особому рассмотрению.
Переходные электромеханические процессы можно также различать в зависимости от сложности системы, в которой они происходят.
В системе любой сложности может быть учтено действие регуляторов возбуждения или скорости, что может сделать расчеты, проводимые для простой системы, более громоздкими, чем расчеты для сложной системы. Особые вопросы возникают при учете весьма длинных линий, входящих в состав системы, как цепей с распределенными постоянными.
Сложность расчета зависит также и от того, проводится он с учетом мгновенных изменений параметров режима или ведется по их огибающим. Таким образом, само по себе разделение систем на простые и сложные является в известной мере условным, не характеризующим в полной мере сложность проведения расчетов.