

П.4. Геометрическая интерпретация и графическое решение злп
Можно решить графически ЗЛП сформулированную:
- в симметричной форме или в общем виде с двумя переменными;
- в канонической форме с двумя свободными переменными.
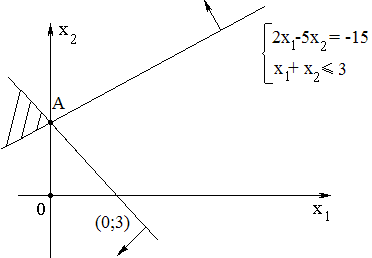
Рассмотрим ЗЛП:
(7)

Каждое
ограничение (8) задает на плоскости
 полуплоскость, которая представляет
собой выпуклое множество. Пересечение
(общая часть) выпуклых множеств – также
выпуклое. Следовательно, область
допустимых планов ЗЛП выпуклое множество.
Оно может иметь следующий вид:
полуплоскость, которая представляет
собой выпуклое множество. Пересечение
(общая часть) выпуклых множеств – также
выпуклое. Следовательно, область
допустимых планов ЗЛП выпуклое множество.
Оно может иметь следующий вид:
a. выпуклый замкнутый многоугольник (имеется максимум и минимум целевой функции; если линия уровня параллельна границе многоугольника – решений множество, имеется альтернативный оптимум; если несколько ограничений пересекаются в одной угловой точке – решение вырожденное)
Пример 3:
|
|


b. выпуклый незамкнутый многоугольник (не существует либо максимум, либо минимум неограниченной целевой функции)
Пример 4:
|
|

c. отрезок, точка
Пример 5:
|
|
Пример 6:
|
|

- пустое множество (решений ЗЛП нет – условия неравенства – противоречивы)
Пример 7:
|
|
Пусть
область допустимых планов ЗЛП – непустое
множество (многоугольник). Выбрав
произвольное значение целевой функции
 получают равенство
получают равенство
 (графически – это уравнение прямой). В
точках построенной прямой
целевая функция сохраняет одно и то же
значение
.
При различных значениях
(графически – это уравнение прямой). В
точках построенной прямой
целевая функция сохраняет одно и то же
значение
.
При различных значениях
 получают семейство параллельных прямых,
называемых линиями
уровня
целевой функции.
получают семейство параллельных прямых,
называемых линиями
уровня
целевой функции.
Чтобы
установить направление возрастания
целевой функции найдем частные производные
целевой функции по
 и
и
 :
:
 ;
;
 .
Вектор
.
Вектор
 является градиентом
целевой функции.
является градиентом
целевой функции.
Он задает направление наискорейшего возрастания функции, а направление наискорейшего убывания функции задает вектор
 ,
,
называемый
антиградиентом.
Вектор
 перпендикулярен прямым
перпендикулярен прямым
 .
.
Алгоритм графического решения злп.
на основе системы ограничений строится область допустимых планов ЗЛП.
строится вектор наискорейшего возрастания целевой функции –градиент (если в ЗЛП требуется минимизировать целевую функцию строят антиградиент).
проводится произвольная линия уровня
 (обычно это
(обычно это
 )
перпендикулярно вектору
.
)
перпендикулярно вектору
.при решении задачи на максимум перемещают линию уровня
 в направлении вектора
так, чтобы она касалась области допустимых
значений в ее крайнем положении (если
решается задача на минимум, то перемещают
линию уровня в направлении антиградиента).
в направлении вектора
так, чтобы она касалась области допустимых
значений в ее крайнем положении (если
решается задача на минимум, то перемещают
линию уровня в направлении антиградиента).
определяется оптимальный план
 и экстремальное значение функции
и экстремальное значение функции
 .
.
При этом возможны следующие случаи:
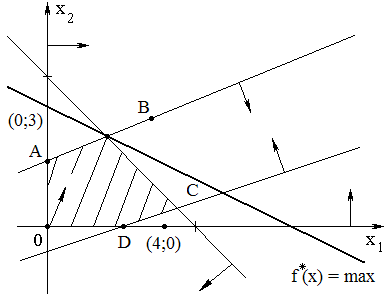
оптимальный план единственный (на рисунке – точка B – максимум, точка O – минимум)
Пример 8:
|
|

 ,
,

b.оптимальных планов бесконечное множество, при этом линия уровня проходит по границе области допустимых значений (альтернативный оптимум)
-
Пример 9:

 ,
,

,


 =1
=1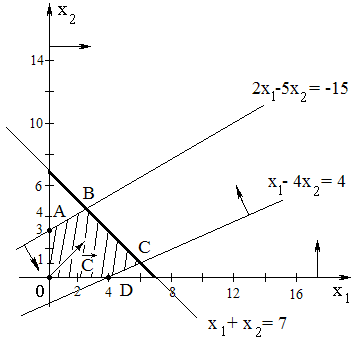
целевая функция не ограничена (С – точка минимума; максимума целевая функция не достигает в силу неограниченности ОДП).
Пример 10:
|
|
если область допустимых планов состоит из одной точки, то эта точка является решением ЗЛП.
если область допустимых планов – пустое множество – в этом случае задача не имеет решения.
Пример 11 (преобразование ЗЛП к каноническому виду и графическое решение)
ЗЛП сформулирова-на в общем виде (x, y – переменные) |
границы области допустимых решений задаются уравнениями прямых «в отрезках» |



ЗЛП сформулиро-ванная в каноническом виде |
свободные переменные |


Легко различить базисные и свободные переменные, составив матрицу A.

Свободные переменные
Базисные переменные




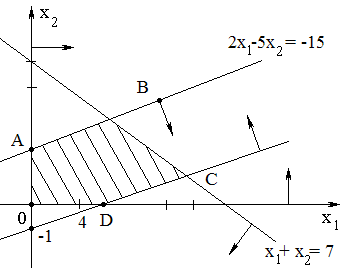
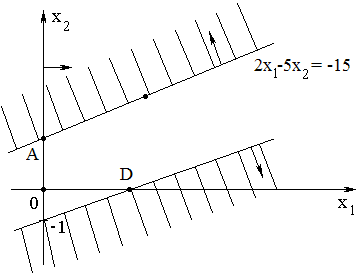
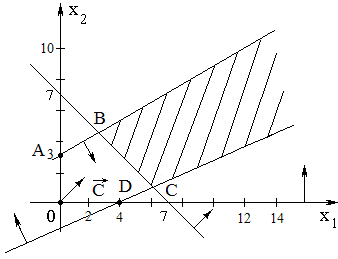
На
плоскости
 построены полуплоскости, задаваемые
ограничениями (2). Анализ чертежа
показывает, что ограничение
(e)
– избыточное (его можно отбросить).
Через точку C(6;1)
проходит 3 прямые (a),
(b),
(d),
что указывает на вырожденность
соответствующего опорного решения
(содержащего базисные 0). Получена область
допустимых значений – выпуклый
многоугольник ABCD.
построены полуплоскости, задаваемые
ограничениями (2). Анализ чертежа
показывает, что ограничение
(e)
– избыточное (его можно отбросить).
Через точку C(6;1)
проходит 3 прямые (a),
(b),
(d),
что указывает на вырожденность
соответствующего опорного решения
(содержащего базисные 0). Получена область
допустимых значений – выпуклый
многоугольник ABCD.
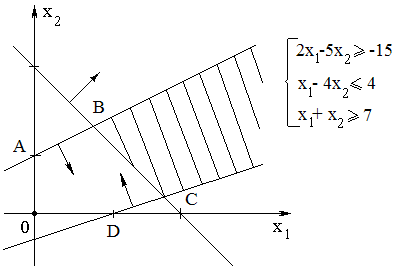
Из
точки O(o,o)
проведены векторы
 - градиент и
- градиент и
 .
Смещая линии уровня в направлении
градиента, найдём точку в которой целевая
функция достигает максимального
значения. B(1;6)
– план, обеспечивающий max
f(x,y):
.
Смещая линии уровня в направлении
градиента, найдём точку в которой целевая
функция достигает максимального
значения. B(1;6)
– план, обеспечивающий max
f(x,y):
 .
.
Смещая
линии уровня в направлении антиградиента,
найдём точки в которой целевая функция
достигает минимального значения. D(3;0),
C(6;1)
– планы, обеспечивающие min
f(x,y)
:



(на альтернативный оптимум указывает то, что анти градиент ортогонален одной из границ области G: отрезку CD)
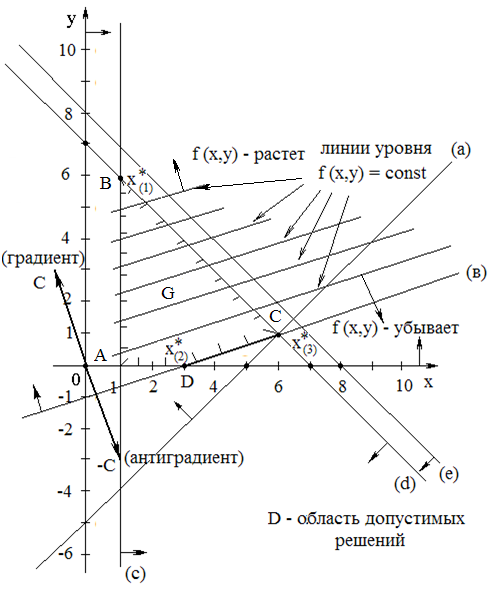
Рисунок 5. Графическое решение ЗЛП