

25. Назначение направляющих устройств подвески. Устройство и область применения различных конструкций направляющих устройств.
Р ис. 1 Схема подвески автомобиля
Н аправляющее
устройство (на рисунке рычаг 9) – механизм,
воспринимающий действующие на колесо
продольные и боковые силы и их моменты.
Направляющее устройство воспринимает
также реактивный момент P-,r
(r
— радиус колеса), стремящийся повернуть
мост автомобиля в направлении,
противоположном вращению колес. При
торможении через направляющее
устройство на раму от колеса передается
тормозная сила, и им воспринимается
тормозной момент, стремящийся
повернуть мост в направлении вращения
колес. Кроме того, через направляющее
устройство передаются боковые силы,
возникающие, например, при повороте
автомобиля. Направляющее устройство
не только передает продольные и поперечные
силы и их моменты. Оно определяет
характер перемещения колес относительно
рамы (кузова) автомобиля. По типу
направляющего устройства подвески
делят на две основные группы: зависимые
и независимые. Отличительной особенностью
зависимой подвески является наличие
жесткой балки, связывающей левое и
правое колеса оси, вследствие чего
перемещение одного из них в поперечной
плоскости передается другому.
аправляющее
устройство (на рисунке рычаг 9) – механизм,
воспринимающий действующие на колесо
продольные и боковые силы и их моменты.
Направляющее устройство воспринимает
также реактивный момент P-,r
(r
— радиус колеса), стремящийся повернуть
мост автомобиля в направлении,
противоположном вращению колес. При
торможении через направляющее
устройство на раму от колеса передается
тормозная сила, и им воспринимается
тормозной момент, стремящийся
повернуть мост в направлении вращения
колес. Кроме того, через направляющее
устройство передаются боковые силы,
возникающие, например, при повороте
автомобиля. Направляющее устройство
не только передает продольные и поперечные
силы и их моменты. Оно определяет
характер перемещения колес относительно
рамы (кузова) автомобиля. По типу
направляющего устройства подвески
делят на две основные группы: зависимые
и независимые. Отличительной особенностью
зависимой подвески является наличие
жесткой балки, связывающей левое и
правое колеса оси, вследствие чего
перемещение одного из них в поперечной
плоскости передается другому.
Н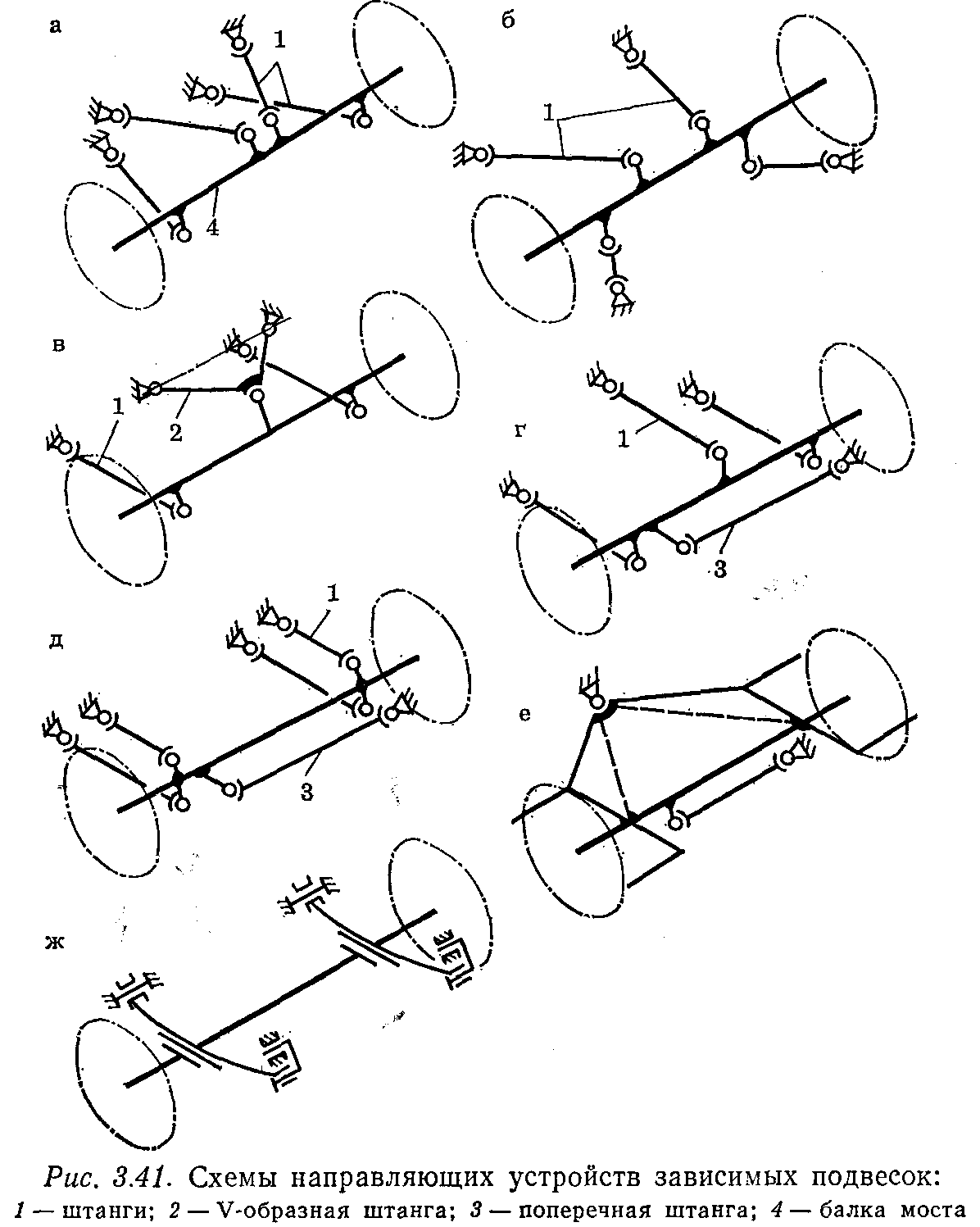 аправляющее
устройство подвески должно: 1) при
независимой подвеске иметь одну степень
свободы, обеспечивающую вертикальное
или близкое к нему перемещение колеса;
2) при зависимой подвеске — две степени
свободы, обеспечивающие вертикальное
или близкое к нему перемещение балки
моста, при котором ось моста остается
перпендикулярной к продольной оси
автомобиля, и поворот балки моста в
плоскости, перпендикулярной к продольной
оси автомобиля; 3) изолировать кузов от
дорожных шумов и вибраций, вызванных
качением шины.
аправляющее
устройство подвески должно: 1) при
независимой подвеске иметь одну степень
свободы, обеспечивающую вертикальное
или близкое к нему перемещение колеса;
2) при зависимой подвеске — две степени
свободы, обеспечивающие вертикальное
или близкое к нему перемещение балки
моста, при котором ось моста остается
перпендикулярной к продольной оси
автомобиля, и поворот балки моста в
плоскости, перпендикулярной к продольной
оси автомобиля; 3) изолировать кузов от
дорожных шумов и вибраций, вызванных
качением шины.
При зависимой подвеске оба колеса соединены балкой моста. Кинематически определенная установка моста в этом случае достигается использованием пространственных механизмов с двумя степенями свободы. Основным типом такого пространственного механизма является направляющее устройство с четырьмя штангами.
Направляющее устройство (рис. 3.41,6), у которого две штанги расположены по одну сторону моста, а две—по другую, способствует меньшему изменению базы автомобиля по сравнению с основным типом направляющего устройства (рис. 3.41, а). Но при этом увеличивается угол поворота моста вокруг его продольной оси, что необходимо учитывать при расчете углов установки карданного вала ведущего моста. В некоторых конструкциях две верхние штанги заменены одной V-образной (рис. 3.41, в). Две сферические кинематические пары крепления рычага на раме могут быть заменены кинематическими парами вращения. Боковые силы, действующие на колесо, воспринимаются только V-образной штангой, которая может быть развернута назад.
В направляющих устройствах (рис. 3.41, г...е) боковые силы воспринимаются поперечной штангой (тяга Панара).
Направляющее устройство с одним треугольным рычагом (рис. 3.41, е) позволяет наиболее просто разнести упругие элементы до размеров колеи автомобиля. Подвеска на листовых рессорах (рис. 3.41, ж) является наиболее распространенной. В общем случае для получения необходимых перемещений моста рессоры подвергаются изгибу и кручению.
С точки зрения кинематики схемы направляющих устройств, показанные на рис. 3.41, а...е, можно привести к схемам плоских двух- или однорычажных направляющих устройств, если рассматривать независимо вертикальное перемещение моста и его поворот в поперечной плоскости автомобиля.Рис. 3.42. Схемы однорычажных направляющих устройств
У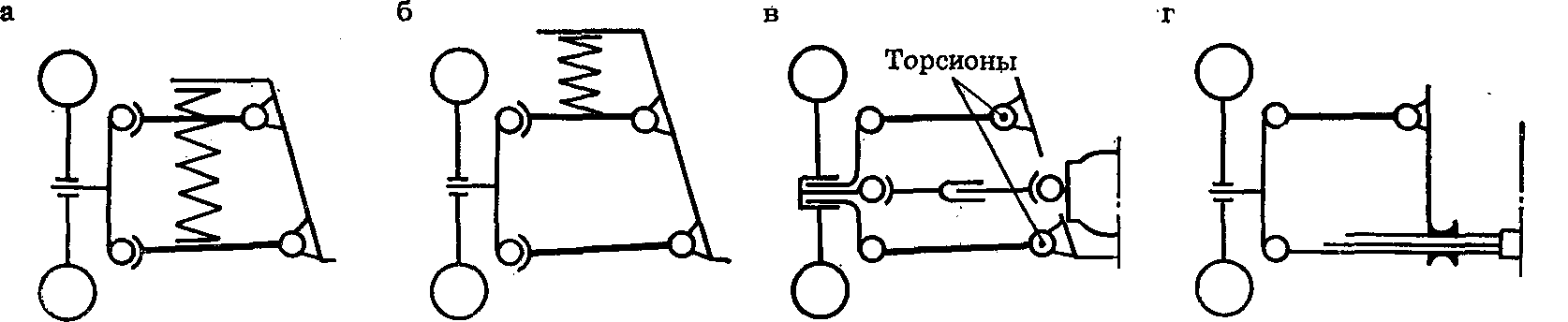 однорычажных направляющих устройств
независимых подвесок качание рычага
может происходить в продольной (рис.
3.42, а, в)
или поперечной плоскости (рис. 3.42, б,
г) или
одновременно в двух плоскостях. Для
получения удовлетворительных
кинематических характеристик, особенно
при качании рычага в поперечной плоскости,
требуется большая длина рычага, что не
всегда возможно осуществить по условиям
компоновки. Изменение угла наклона оси
поворота колеса в продольной и поперечной
плоскостях при вертикальном перемещении
колеса является одним из главных
недостатков однорычажных направляющих
устройств, и поэтому они в основном
применяются на неуправляемых мостах.
однорычажных направляющих устройств
независимых подвесок качание рычага
может происходить в продольной (рис.
3.42, а, в)
или поперечной плоскости (рис. 3.42, б,
г) или
одновременно в двух плоскостях. Для
получения удовлетворительных
кинематических характеристик, особенно
при качании рычага в поперечной плоскости,
требуется большая длина рычага, что не
всегда возможно осуществить по условиям
компоновки. Изменение угла наклона оси
поворота колеса в продольной и поперечной
плоскостях при вертикальном перемещении
колеса является одним из главных
недостатков однорычажных направляющих
устройств, и поэтому они в основном
применяются на неуправляемых мостах.
Д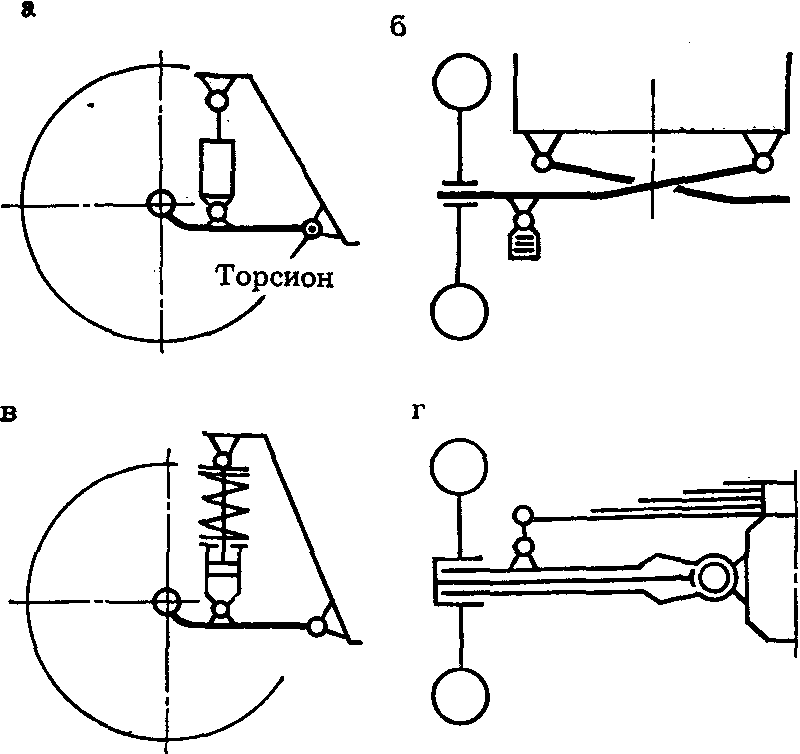 вухрычажные
направляющие устройства представляют
пространственные механизмы. Верхние и
нижние рычаги имеют разную длину, поэтому
такие направляющие устройства называются
трапециевидными. Упругие элементы,
работающие на сжатие, могут быть связаны
с нижним или верхним рычагом (рис. 3.44,
а, б) или
же со стойкой колеса. Торсионы соединяются
с верхним или нижним рычагом и располагаются
вдоль продольной оси автомобиля. В
случае необходимости, особенно на
тяжелых автомобилях, могут устанавливаться
два торсиона (рис. 3.44, в). Вместо верхнего
или нижнего рычага часто используются
листовые рессоры (рис. 3.44, г).Рис.
3.44. Схемы
двухрычажных направляющих устройств
вухрычажные
направляющие устройства представляют
пространственные механизмы. Верхние и
нижние рычаги имеют разную длину, поэтому
такие направляющие устройства называются
трапециевидными. Упругие элементы,
работающие на сжатие, могут быть связаны
с нижним или верхним рычагом (рис. 3.44,
а, б) или
же со стойкой колеса. Торсионы соединяются
с верхним или нижним рычагом и располагаются
вдоль продольной оси автомобиля. В
случае необходимости, особенно на
тяжелых автомобилях, могут устанавливаться
два торсиона (рис. 3.44, в). Вместо верхнего
или нижнего рычага часто используются
листовые рессоры (рис. 3.44, г).Рис.
3.44. Схемы
двухрычажных направляющих устройств
Рычажно- телескопические направляющие устройства в подвеске Макферсона используются как на легковых автомобилях, так и на тяжелых карьерных самосвалах. Телескопическая стойка (рис. 3.45, а) на легковых автомобилях выполняет и функцию амортизатора. Пружина устанавливается непосредственно на стойке или связана с рычагом. В последнем случае упрощаются обслуживание и ремонт стойки. На тяжелых автомобилях в качестве телескопической стойки используется гидропневматический упругий элемент (рис. 3.45,6). Телескопические направляющие устройства применяются сравнительно редко.
Р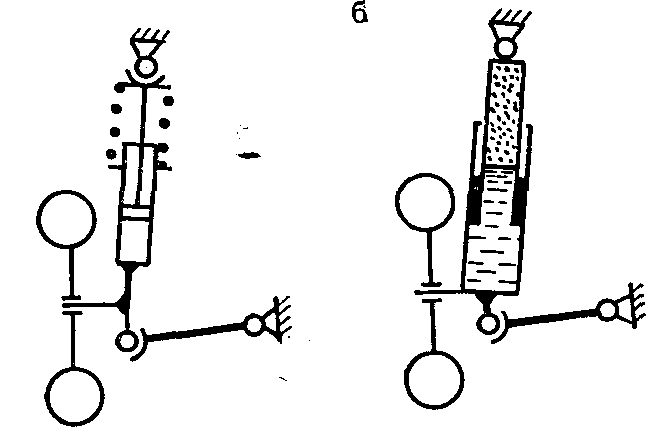 ис.
3.45. Схемы
рычажно-телескопиче-ских направляющих
устройств
ис.
3.45. Схемы
рычажно-телескопиче-ских направляющих
устройств