Лекция 41 Электрические измерения
Объектами электрических измерений являются все электрические и магнитные величины: ток, напряжение, магнитный поток и т.д.
Электр. приборами измеряют и неэлектрические величины: температура, давление и т.д., которые для этой цели преобразуются в пропорциональные им электрические величины. Остановимся подробнее на цифровых приборах. Микропроцессоры позволяют существенно повысить точность и производительность измереницй, позволяя дополнительно производить запоминание и обработку результатов измерений. Для исследования сложных объектов применяют автоматические измерительные системы.
Измерение любой физической величины заключается в её сравнении с эталоном. Различают прямые измерения (ток в цепи) и косвенные (сопротивление по данным измерений тока и напряжения).
Погрешности измерения и классы точности.
Абсолютная погрешность: ΔА=Аиз-А.
Относительная погрешность: γo=(ΔА/А) 100%.
Приведенная погрешность: γпр=(ΔА/Аном) 100%.
Класс точности прибора определяет допустимую погрешность в пределах классов точности приборов:0.05, 0.1, 0.2, 0.5, 1, 1.5, 2.5, 4.
Потребление энергии приборами.
Включение прибора в электрическую сеть изменяет режим работы сети.
Прибор не должен существенно влиять на параметры работа цепи.

На рис.12.2 А- измеряет ток, а V-напряжение на R.
V/I=R’=R+Ra. R=R’ (1-Ra/R’). Чем меньше Ra, тем точнее показания.
На рис. 12.3 I’=I+Iv.
I’=I+Iv, G’=I’/V=G+Gv =1/R+1/Rv. Чем больше Rv, тем точнее показания.
Механические узлы приборов.
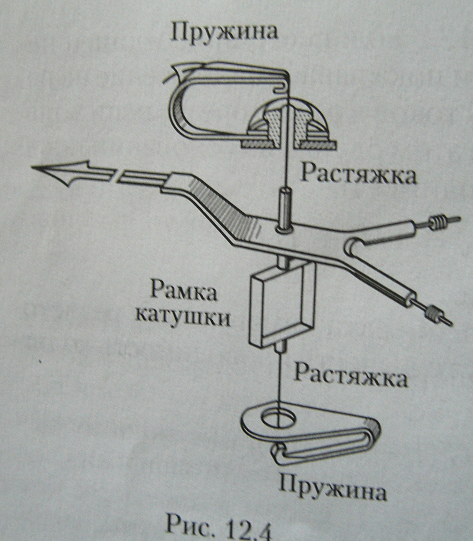
Подвижная часть прибора располагается на растяжках (упругие ленты из бериллиевой или оловянно- цинковой ленты), которые могут служить для подвода тока к подвижной части прибора (Рис. 12.4). Кварцевые растяжки применяют на зеркальных гальванометрах (рис.12.6).
Противодействующий момент создаётся спиральной пружиной (рис.12.5).
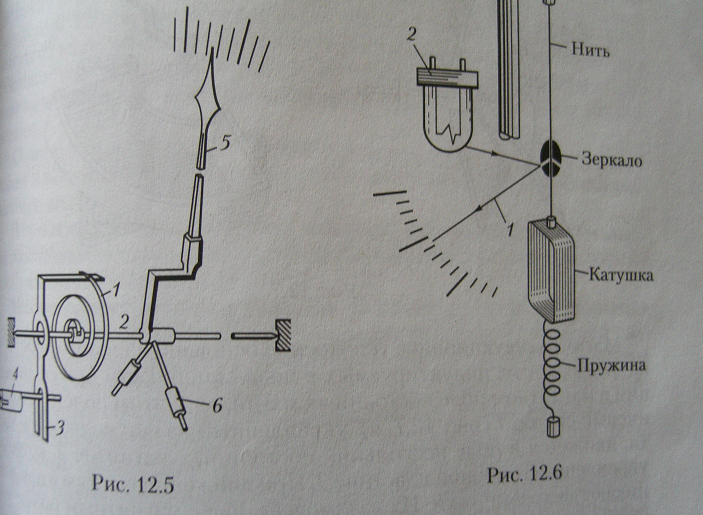
Грузила 6 на рис. 12.5 уравновешивают подвижную часть прибора.
Для быстрого измерения нужна система успокоителей. Магнитоиндукционные успокоители (рис.12.7А) основано на взаимодействии вихревых токов, индуцированных в магнитном поле постоянных магнитов 2 в алюминиевой подвижной пластине 1.
В воздушных успокоителях для торможения
используют разность давлений воздуха
в закрытой камере по обе стороны легкого
алюминиевого крыла (рис.12.7Б).
воздушных успокоителях для торможения
используют разность давлений воздуха
в закрытой камере по обе стороны легкого
алюминиевого крыла (рис.12.7Б).
подвижного алюминиевого крыла.
Системы показывающих приборов.
Магнитоэлектрическая система.
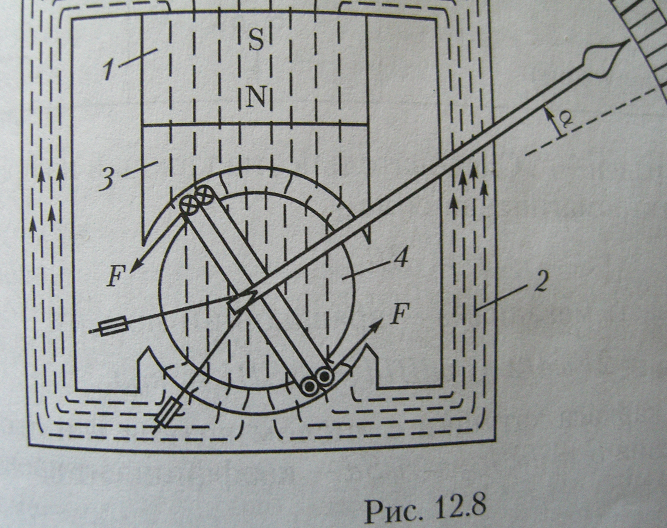
Вращающий момент создаётся взаимодействием измеряемого постоянного тока в катушке механизма с полем постоянного магнита. На рис. 12.8 показана система с подвижной катушкой в воздушном зазоре постоянного магнита. Магнитную цепь механизма составляет постоянный магнит 1, магнитопровод 2, полюсные наконечники 3 и цилиндрический сердечник 4.
Магнитное поле тока I в активной части проводников длиной L взаимодействует с магнитным полем магнита индукцией В силой F=B I L.
Возникает вращающий момент
Mвр =2F ω d/2=k I
Диаметр каркаса d ,ω-число витков катушки.
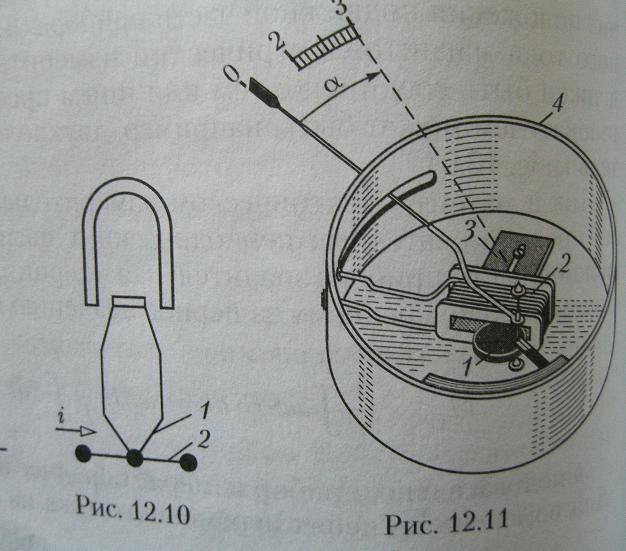
Электромагнитная система.
Вращающий момент обусловлен действием магнитного поля измеряемого тока в неподвижной катушке 2 на подвижный ферромагнитный якорь 1 (рис. 12.11).
Вращающий момент равен
Мвр =I2 dL(α)/(2 d(α)2,
где L(α)- и I индуктивность и ток в катушке.
Если ток синусоидальный, то I=C(α) √ α, где C(α)-цена деления. Аналогичная зависимость и для постоянного тока I.
Недостаток прибора -неравномерная цена деления, но он прост в изготовлении, дешев и допускает большие перегрузки.
Электродинамическая система
Вращающий момент создаётся взаимодействием двух катушек с токами.


Катушка 1 подвижна, катушка 2- неподвижна. Пружина 3 служит для создания противодействующего момента и подвода тока в подвижную катушку. Магнитный момент равен:
Мвр =I1 I2 dL(α)/d(α)
Ток пропускается последовательно через катушки 1 и 2. Система может быть использована для измерения напряжения V, тока I и мощности Р=VI.
Цена деления неравномерна, но приборы могут быть использованы для измерений при постоянных и переменных токах.
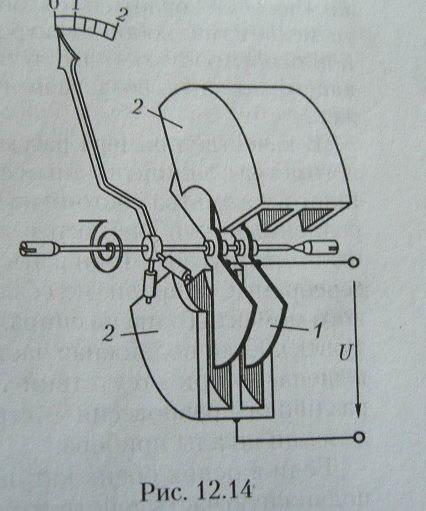
Другие системы..
Под действием измеряемого напряжения заряжаются подвижные 1 и неподвижные2 пластины (см. рис.12.14). Возникающие при этом электростатические силы притяжения создают вращающий момент.
Противодействуют этому пружины. Прибор пригоден для измерения напряжения в цепях постоянного и переменного тока.