

Лабораторная работа 5. Изучение устройства и принципа действия бесконтактного датчика с индуктивно-трансформаторным преобразователем
Цель pаботы: ознакомиться с устpойством, пpинципом действия бесконтактного индуктивно–тpансфоpматоpного датчика, методикой постpоения таpиpовочной хаpактеpистики, пpактическим использованием датчиков в автоматизированных системах упpавления.
Теоретические сведения
Основой конструкции индуктивных датчиков является катушка индук-тивности или совокупность катушек. На рис. 5.1 приведены варианты конст-рукций индуктивных датчиков. На рис. 5.1, а показан датчик с переменным зазором d; в зависимости от величины зазора изменяется индуктивность ка-тушки W. В датчике (рис. 5.1, б) изменение индуктивности происходит при перемещении плунжера внутрь катушки. Как видно по конструкции, индук-тивные датчики могут использоваться для измерения перемещений, в част-ности, такие датчики используются в моделях ОГБ подъемного крана, взамен реостатных.
Главным эксплуатационным достоинством индуктивных датчиков яв-ляется их высокая надежность, обусловленная полным отсутствием механи-ческого контакта между подвижными частями, что позволяет эксплуатировать их в условия больших механических нагрузок (ударов, вибрации), сильного загрязнения и пыли. Как недостаток, можно отметить сложность питания индуктивных датчиков, как правило, переменным током повышенной частоты, что требует использования дополнительно схем специальных генераторов– преобразователей. В некоторых случаях использования, индуктивные датчики не требуют питающих напряжений, т.к. они сами могут генерировать электрический ток. На рис. 5.2 приведен пример датчика системы контроля аварийного режима ленточного транспортера.
Если транспортер работает нормально, то при вращении пассивного ба-рабана транспортера будет вращаться зубчатый ротор датчика. При этом магнитный поток, создаваемый встроенным постоянным магнитом, будет меняться с частотой прохождения зубцов ротора вблизи полюсных концов магнитопровода датчика. Переменный магнитный поток будет создавать в катушке датчика э. д. с. индукции с такой же частотой. Если произойдет ава-рия транспортера, например, обрыв ленты, заклинивание двигателя или ре-дуктора и т.д., то э. д. с. исчезнет или заметно уменьшится. Сигнал датчика можно использовать для автоматического отключения двигателя привода транспортера.

Рис. 5.1. Индуктивные датчики: а – с переменным зазором; б – с подвижным сердечником; в – с профильным магнитным экраном; г – бесконтактный концевой выключатель с магнитным экраном типа «флажок»: 1 – ферромагнитный сердечник магнитопровода; 2 – подвижное ярмо; 3 – ферромагнитный плунжер; 4 – катушка; 5 – первичная и вторичная катушки; 6 – профильный магнитный экран; 7 – магнитный экран (« флажок»)
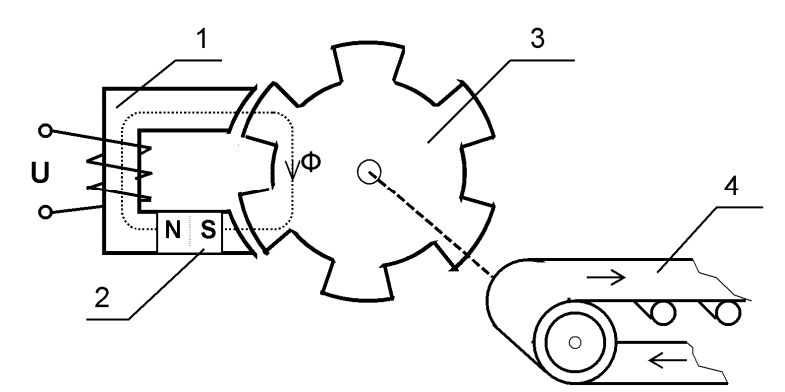
Рис. 5.2. Индуктивный датчик скорости вращения: 1 – сердечник (магнитопровод) датчика;
2 – постоянный магнит; 3 – зубчатый ферромагнитный ротор; 4 – ленточный транспортер
Особый интерес представляет использование индуктивного датчика в строительной практике для определения толщины защитного слоя бетона и диаметра арматуры. Необходимость в подобных измерениях возникает при оценке несущей способности конструкций, при обследовании зданий и сооружений, при проведении работ, связанных с реконструкцией. На рис. 5.3 приведена упрощенная схема измерителя защитного слоя бетона (ИЗС).
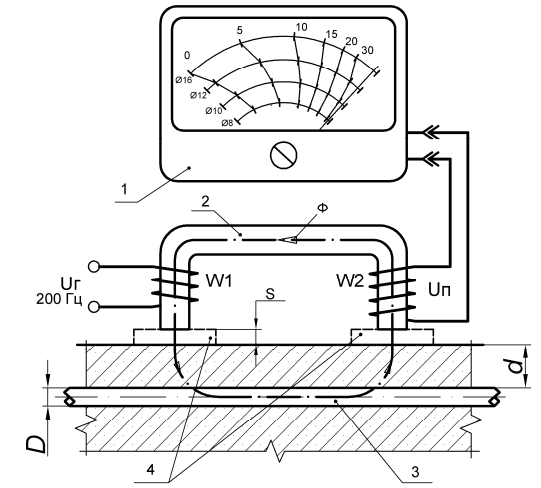
Рис. 5.3. Измеритель защитного слоя бетона
Основой его конструкции является индуктивный датчик 2, на разомк-нутом магнитопроводе которого размещены две катушки. Катушка W1 запи-тывается переменным током частотой около 200 Гц, к катушке W2 подключен вольтметр 1, шкала которого проградуирована в миллиметрах толщины защитного слоя, для нескольких типовых значений диаметров арматуры 3.
Таким образом конструкция датчика представляет собой своеобразный трансформатор, магнитный поток которого замыкается через находящуюся в бетоне стальную арматуру. Величина э. д. с. катушки W2 будет пропорции-ональна величине магнитного потока. Чем ближе к датчику будет находиться арматура и чем большим будет ее диаметр, тем сильнее будет отклоняться стрелка вольтметра. Шкала вольтметра проградуирована в миллиметрах толщины защитного слоя для нескольких значений диаметра арматуры. Т.о., для получения отсчета необходимо знать либо диаметр арматуры, либо расстояние до нее. Если такие данные отсутствуют, то прибор позволяет получить оба параметра, правда, за счет некоторого усложнения методики использования.
В этом случае делается два замера в одном и том же месте установки датчика, первый замер обычный – фиксируется первый отсчет прибора – П1; затем делается второй замер П2, но датчик устанавливается на поверхность бетона через пластмассовые прокладки 4 известной толщины S.
Таким образом, получаем два уравнения с двумя неизвестными D и d, и одной функцией преобразования F:
П1 = F (D, d) ;
П2 = F (D, d + S).
Решение уравнения обычно выполняется по графическим номограммам, которые прилагаются к прибору ИЗС.
Индуктивно-тpансфоpматоpные датчики (ИТД) пpименяются в системах автоматического упpавления для пpеобpазования линейного или углового пеpемещения контpолиpуемого элемента машины в электpический сигнал.
Пpинципиальная схема устpойства датчика пpедставлена на pис. 5.4. Вал 5 датчика смонтиpован на двух pадиальных подшипниках 4. Наpужный конец вала находится в постоянном контакте с контpолиpуемым элементом констpукции машины. На внутpеннем конце вала укpеплен экpан 2, помещенный в pабочем зазоpе блока катушек 3 индуктивно–тpансфоpматоpного пpеобpазователя 1.
Электpическая схема ИТД показана на pис. 5.5. ИТД состоит из двух паp катушек: L1, L2 и L3, L4, pазмещенных в чашках бpоневых сеpдечников. Катушки L1 и L2 включены в контуp генеpатоpа синусоидальных колебаний (тpанзистоp Т1) и пpедставляют собой пеpвичную обмотку тpансфоpматоpа.
Катушки L3 и L4 являются втоpичными обмотками тpансфоpматоpа. Между сеpдечником катушек пеpвичных и втоpичных обмоток имеется воздушный зазоp, от величины которого зависит величина напpяжения на втоpичной обмотке тpансфоpматоpа. Изменяя величину зазоpа введением в него экpана, получают на втоpичной обмотке напpяжение, пpопоpциональное величине пеpемещения экpана в зазоpе, т.е. величине изменения угла повоpота элемента (напpимеp, стpелы кpана). Как видно из схемы (см. рис. 5.5), соответственно изменяется напряжение на базе трансформатора Т2 и входное напряжение.
При изменении воздушного зазора (входная величина) меняются взаимная индукция М и магнитное сопротивление системы Rм.
Взаимная индукция обмоток, Тл,
М = W1 W2/ Rм ,
где W1, W2 – число витков обмоток.
Индуктивность системы, Гн,
L = W2 S 0/ (2 ),
где S – площадь зазора, мм2; 0 – магнитная проницаемость воздушного зазора, Гн/м; – длина зазора, мм.
Магнитное сопротивление системы, Ом,

где Rст – магнитное сопротивление стальных частей магнитопровода, Ом; R – магнитное сопротивление воздушного зазора, Ом; – угловая частота источника переменного тока, Гц.

Рис. 5.4. Пpинципиальная схема индуктивно–тpансфоpматоpного датчика:
1 – пpеобpазователь; 2 – экpан; 3 – катушки; 4 – подшипник; 5 – вал
Так как R >> Rст, то можно при расчете характеристик преобразователя Rст пренебречь.
Ток в цепи преобразователя, А,
 .
.
Так как R << L, R можно пренебречь.
Бесконтактные датчики с индуктивно–трансформаторным преобразова-телем имеют следующие достоинства: отсутствует необходимость в измери-тельных схемах (измерительный прибор подключается непосредственно ко вторичной обмотке); высокая чувствительность, надежность и долговечность; значительная величина выходной мощности (до сотен вольт–ампер); простота конструкции и удобство эксплуатации.

Рис. 5.5. Электрическая схема индуктивно–трансформаторного датчика
Недостатки бесконтактных датчиков с индуктивно–трансформаторным преобразователем: нелинейная зависимость измеряемого тока в цепи от перемещения (возникают значительные ферродинамические усилия между подвижной и неподвижной частями датчика, что вносит существенные погрешности в измеряемую величину).