

4.3.7. Передача винт-гайка
Предназначена для преобразования вращательного движения в поступательное или наоборот.
Вращение винта или гайки осуществляют обычно с помощью маховика, шестерни, шкива, рукоятки и т.п. (рисунок 4.15). При этом передаточное отношение условно можно выразить отношением окружного перемещения маховика SM к перемещению винта (или гайки) SB:
![]() ,
(4.17)
,
(4.17)
где dM – диаметр маховика;
р1 – ход винта.
При малом р1 и сравнительно большом dM можно получить очень большое передаточное число u. Например, при р1=4 мм, dM=250 мм – u=196.
Зависимость между осевой силой Fa на винте (гайке) и окружной силой Ft на маховике (рукоятке) запишем в виде:
![]() ,
(4.18)
,
(4.18)
где η – кпд винтовой пары.
Для u=196 и η=0,35 получим Fa=68,6 Ft. Если к маховику приложить усилие Ft=160H, то осевая сила составит Fa≈10980 H.
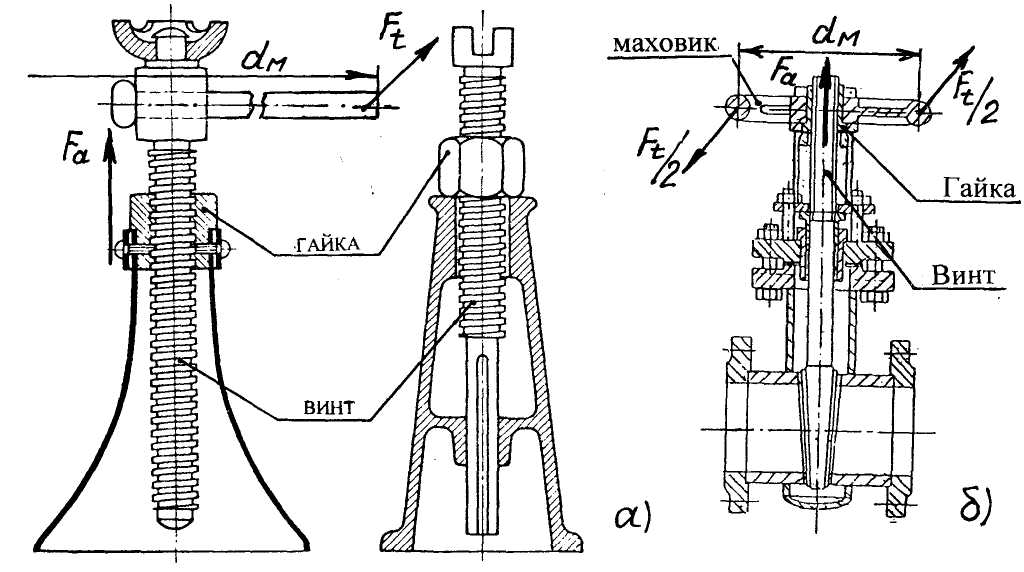
Рис. 4.15. Примеры применения передачи винт-гайка:
а) – в винтовых домкратах; б) – в клиновой задвижке
Таким образом, передача винт-гайка при простой и компактной конструкции позволяет получать большой выигрыш в силе или осуществлять медленные и точные перемещения.
Винты передачи делятся на грузовые, применяемые для создания больших осевых сил, и ходовые, для осуществления точных перемещений. Винты силовых передач имеют трапецеидальную, иногда прямоугольную резьбу, т.к. они имеют более высокий кпд. Для получения точных перемещений применяют винты с треугольной резьбой и мелким шагом.
Гайки винтовой пары применяют цельные, для грузовых механизмов, или составные, для механизмов точных перемещений.
Для увеличения кпд передачи и обеспечения ее износостойкости материалы винта и гайки должны представлять собой антифрикционную пару. Винты изготавливают из углеродистых или легированных сталей, а гайки – из бронзы, серого или антифрикционного чугуна.
Основным критерием работоспособности этих передач является износостойкость резьбы. Поэтому при проектном расчете резьба рассчитывается на износостойкость, а при проверочном производится расчет винта на прочность, а для длинных винтов, работающих на сжатие – и на устойчивость.
Достоинства: передачи винт-гайка: простота, компактность и технологичность конструкции, большая нагрузочная способность, плавность и бесшумность работы, возможность получения большого выигрыша в силе, медленного движения при высокой точности перемещений.
Недостатки заключаются в значительном трении в резьбовой паре, что вызывает повышенный ее износ, снижает ее кпд, а также необходимость применять для гайки дорогостоящие антифрикционные материалы.
4.3.8. Редукторы и вариаторы
Редуктор – это понижающая передача, заключенная в единый закрытый корпус, выполненная в виде отдельного агрегата. Редукторы выпускают для привода определенной машины - специальные или без указания конкретной машины - общемашиностроительного применения.
Редукторы классифицируют:
по типу передачи – зубчатые, червячные, зубчато-червячные;
по числу ступеней – одно-, двух- и многоступенчатые;
по типу зубчатых колес - цилиндрические, конические, коническо-цилиндрические;
по расположению валов – горизонтальные, вертикальные.
Одноступенчатый цилиндрический горизонтальный редуктор (рис. 4.16) состоит из корпуса 1 закрытого крышкой 2. В корпусе на подшипниках качения установлены ведущий 3 и ведомый 4 валы с насаженными на них шестерней 5 и зубчатым колесом 6. Смазка деталей зацепления и подшипников из общей масляной ванны окунанием и разбрызгиванием. Для контроля уровня масла на корпусе установлено маслоуказательное стекло 7; для выпуска масла - сливная пробка 8. На крышке 2 установлена пробка-сапун 9.
Основные характеристики редуктора, которые используют при его выборе: передаваемая мощность Р, передаточное число u, частота вращения быстроходного вала n1 и межосевое расстояние а.
Редукторы имеют постоянное передаточное число. Если возникает необходимость бесступенчато изменять передаточное число в каких-то пределах, то применяют вариаторы (от варьировать – изменять).
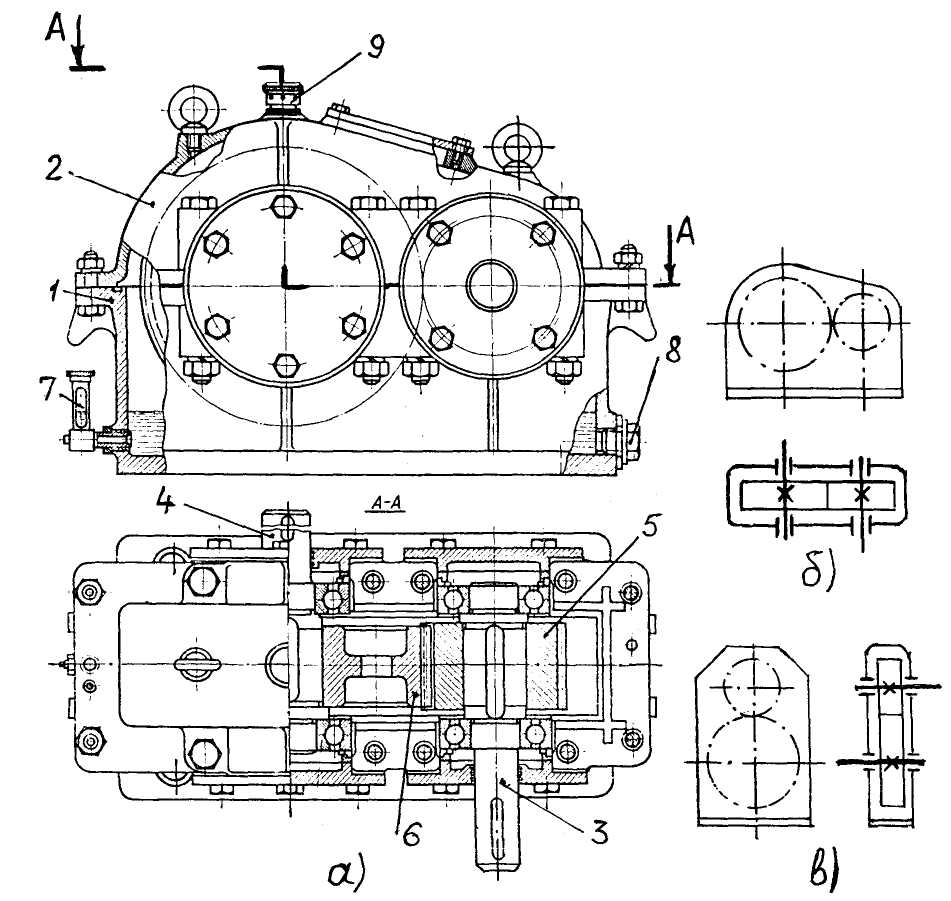
Рис. 4.16. Зубчатый редуктор: а) - общий вид; б) - схема горизонтального редуктора; в) - схема вертикального редуктора
Вариатором называют механизм для плавного изменения передаточного числа (бесступенчатая передача).
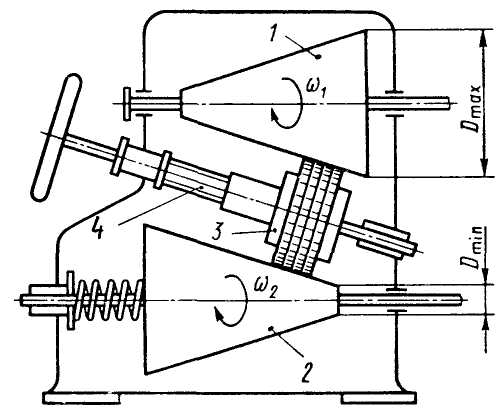
Рис. 4.17. Схема двухконусного фрикционного вариатора
Вариаторы могут быть выполнены в виде открытой или закрытой передачи. При величине передаваемой мощности до 20 кВт широко используются фрикционные вариаторы,
На рис. 4.17 приведена схема двухконусного вариатора с параллельными осями. Изменение передаточного отношения происходит за счет перемещения с помощью винтового механизма 4 промежуточного цилиндрического катка 3, зажатого между рабочими поверхностями конических катков 1 и 2.
Основной
кинематической характеристикой любого
вариатора является диапазон регулирования
Д,
равный отношению максимального
передаточного отношения к минимальному:
![]() .
.
Для рассмотренного
вариатора
![]() ,
а
,
а
![]() ,
и диапазон регулирования определится:
,
и диапазон регулирования определится:
![]() .
.