

Міністерство освіти і науки України
Вищий навчальний заклад
«Київський Індустріальний коледж»
ЛАБОРАТОРНА РОБОТА № 1
Вивчення типових вузлів металорізальних верстатів. Конструкція та наладка коробок швидкостей і подачі токарно-гвинторізного верстата для обробки деталі.
з дисципліни: Основи обробки матеріалів та інструмент
Виконав
Студент групи М-21
Перевірив
Волобуєва Г. В.
Київ 2014
1 Мета роботи
1.1 Навчитись на практиці робити нескладні розрахунки для нарізання різьб та обточування конічних поверхонь.
1.2 Навчитися встановлювати поворотну частину супорту, задню бабку і отримувати заданий конус.
Навчитися встановлювати гітару змінних коліс, потрібний різьбовий інструмент та нарізати спеціальні метричні різьби.
Обладнання та інструмент
2.1Універсальний токарно-гвинторізний верстат.
2.2 Пристрій для закріплення деталі.
2.3 Токарні різці.
2.4 Вимірювальний інструмент.
2.5 Набір ключів.
Теоретичні положення
3.1 Загальні положення
Результатом роботи металорізального верстата є утворення поверхонь деталі з заданими формою, розмірами, точністю і шорсткістю. Для цього необхідно забезпечити необхідні умови кінематичного узгодження переміщень чи швидкостей виконавчих органів між собою і джерелом руху. Цей процес називається кінематичним настроюванням верстата.
У більшості металорізальних верстатів з механічними зв'язками для настроювання кінематичних ланцюгів застосовуються органи кінематичного настроювання у виді гітар змінних зубчастих коліс, пасових передач, варіаторів, регульованих електродвигунів, коробка швидкостей і подач.
Значення передаточного відношення органа настроювання визначають по формулі настроювання і потім його реалізують у гітарах змінних зубчастих коліс підбором і установкою відповідних коліс у гітарі, а в коробках швидкостей і подач, - зачепленням зубчастих коліс.
3.2 Послідовність налагодження
Налагодження
верстата вимагає
розрахунку передаточного відношення
органа налагодження швидкостей ланцюга
для одержання заданої частоти обертання
шпинделя і передаточного відношення
органа налагодження ланцюга для
здійснення заданої подачі.
![]()
Для цієї мети намічають розрахунковий кінематичний ланцюг, складають розрахункові переміщення кінцевих ланок цього ланцюга і рівняння кінематичного балансу, з якого виводять формулу налагодження ланцюга. Рівнянням кінематичного балансу називають рівняння, що зв'язує розрахункові переміщення кінцевих ланок кінематичного ланцюга. Воно є основою для визначення передаточних відносин органа налагодження. Кінцеві ланки можуть мати як обертальний, так і прямолінійний рух. Якщо обоє кінцеві ланки обертаються, то розрахункові переміщення цих ланок умовно записують так
![]()
Стрілка в цьому записі заміняє слово "відповідає". По цих розрахункових переміщеннях складають рівняння кінематичного балансу даного кінематичного ланцюга:
![]()
де пк - частота обертання в хвилину кінцевої ланки органа налагодження;
пн - частота обертання в хвилину початкової ланки органа налагодження;
iпост - постійне передаточне відношення органа налагодження;
іx - шукане передаточне відношення органа налагодження.
Вирішуючи рівняння кінематичного балансу відносно ix, одержимо формулу налагодження розглянутого кінематичного ланцюга.
Якщо одна з кінцевих ланок має обертальний рух, а інша - прямолінійний, то для подачі, вираженої в міліметрах на один оберт початкової ланки, розрахункові переміщення можна записати так:
1 оберт початкової ланки → S мм подовжнього переміщення кінцевої ланки.
Рівняння кінематичного балансу буде мати вид:
1
оберт
початкової ланки
![]()
де l=Z·Тгв — переміщення кінематичної пари, що перетворює обертальний рух у прямолінійний (наприклад, переміщення гайки за один оберт гвинта), мм; (тут Z — число заходів гвинта; Тгв— крок гвинта, мм).
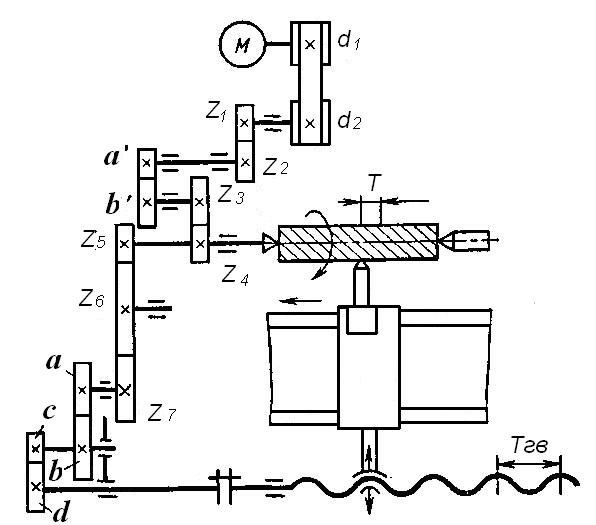
![]()
Рисунок 1 – Спрощена кінематична схема токарно-гвинторізного верстата