

3.5. Тормозные режимы двигателя постоянного тока с независимым возбуждением. Механические характеристики дпт с нв в тормозных режимах
Кроме двигательных режимов электродвигатели также могут работать в тормозных режимах. Тормозной режим характеризуется тем, что скорость вращения и момент двигателя имеют разные знаки. Быстрота и точность, с какой будут протекать переходные процессы остановки или реверса во многом определяют производительность механизма, а иногда и качество вырабатываемого продукта. Возможны три варианта электрического торможения:
рекуперативное торможение;
динамическое торможение;
торможение противовключением.
Каждый тормозной режим является генераторным, так как энергия поступает в машину с вала, преобразуется в электрическую и либо отдаётся в сеть, либо затрачивается на нагрев элементов якорной цепи, обладающих активным сопротивлением, и рассеивается в окружающую среду.
3.5.1. Рекуперативное торможение
Такой режим возникает, когда скорость двигателя больше скорость идеального холостого хода двигателя, то есть выполняется условие
![]() .
.
При этом ЭДС двигателя становится больше
напряжения сети (![]() ),
и ток двигателя меняет направление. При
этом двигатель работает генератором и
отдает энергию в сеть. Электромагнитный
момент двигателя при этом противодействует
внешнему вращающему моменту.
),
и ток двигателя меняет направление. При
этом двигатель работает генератором и
отдает энергию в сеть. Электромагнитный
момент двигателя при этом противодействует
внешнему вращающему моменту.
Данный вид торможения является наиболее экономичным, так как энергия возвращается в сеть. Применение этого способа является эффективным энергосберегающим средством. Этот режим целесообразен, когда привод работает с частыми пусками и остановками. Например, электротранспорт. При движении под уклон также возникают благоприятные условия для возникновения этого режима торможения.
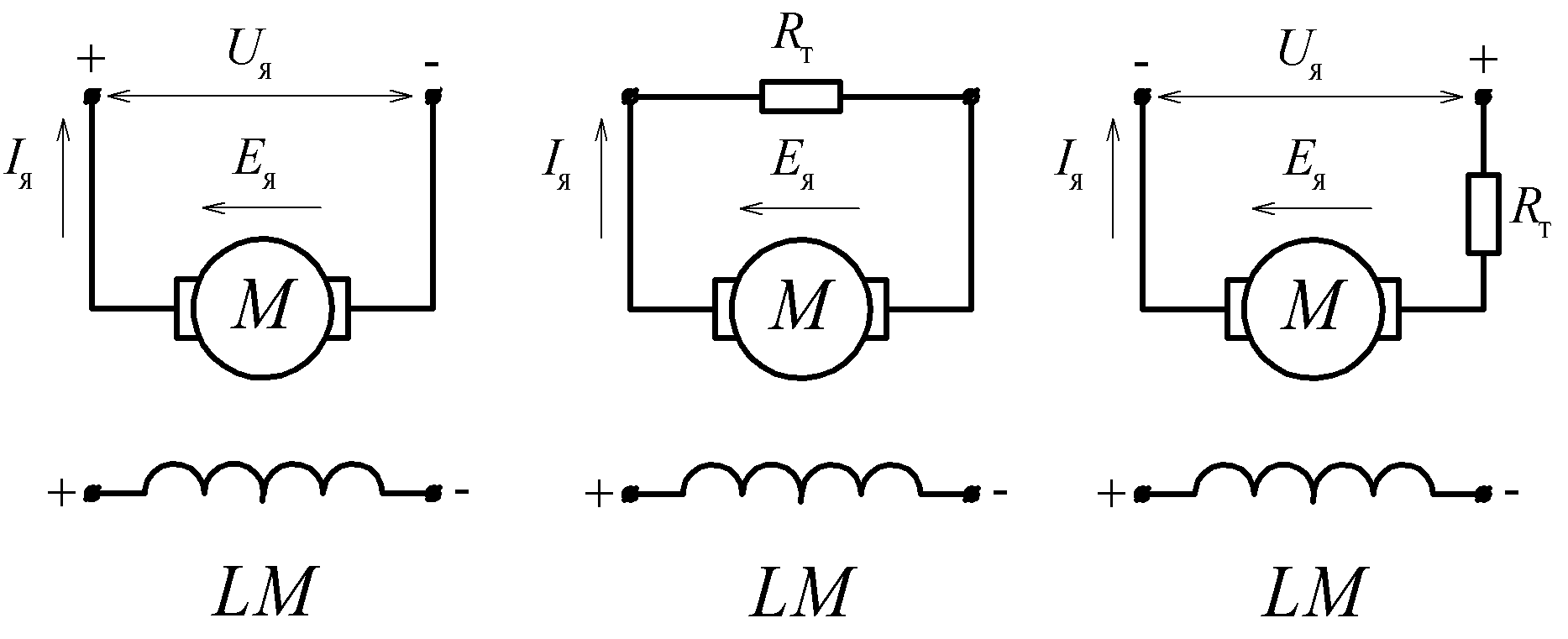
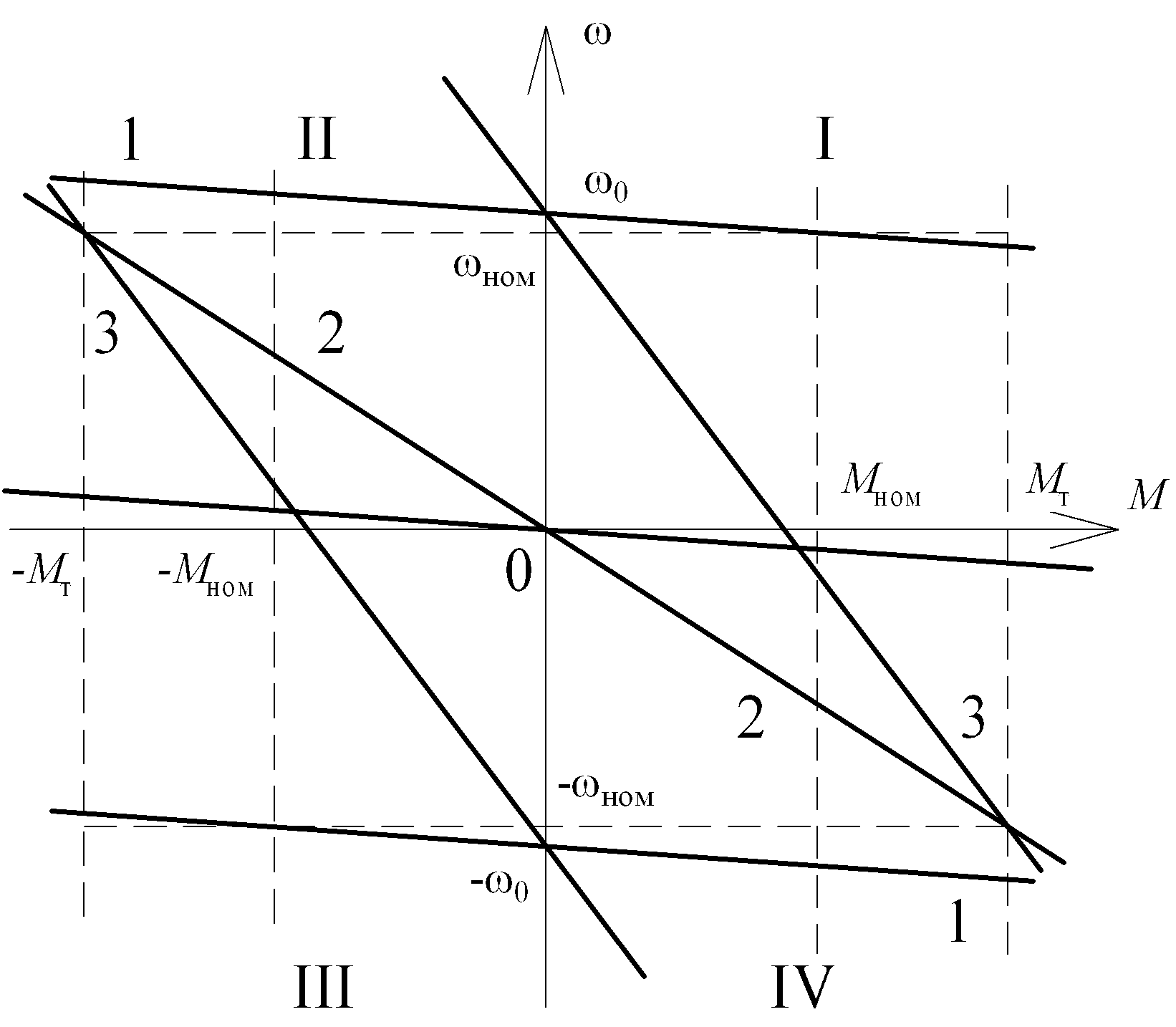
Схема включения двигателя для данного режима показана на рис. 3.6, а, а характеристики представлены на рис. 3.7 (характеристика 1).
3.5.2. Динамическое торможение
Необходимость в таком торможении возникает, когда после отключения двигателя от сети его якорь продолжает вращаться под действием запаса кинетической энергии. Если по технологии требуется более быстрый останов двигателя, чем время остановки на выбеге, используется динамическое торможение.
При данном способе торможения якорь двигателя замыкается на тормозное сопротивление, а обмотка возбуждения остаётся подключенной в сеть для создания тормозного момента. Вырабатываемая при этом энергия переходит в тепловую и рассеивается в окружающее пространство. В этом режиме ток двигателя меняет знак, так как он начинает протекать под действием ЭДС двигателя, которая направлена всегда встречно напряжению сети
![]() .
.
Величину тормозного сопротивления можно определить из формулы
![]() .
.
При этом слишком малое значение тормозного момента ведет к затягивания процесса торможения, а слишком большой ток отрицательно сказывается на работе щеточно-коллекторного аппарата двигателя.
Схема включения двигателя для данного режима показана на рис. 3.6, б, а характеристики на рис. 3.7 (характеристика 2).
|
||
а |
б |
в |
Рис. 3.6. Схемы включения двигателя в тормозных режимах работы (а-рекуперативное, б-динамическое, в-противовключение) |
||
|
Рис. 3.7. Механические характеристики ДПТ с НВ в тормозных режимах |
3.5.3. Торможение противовключением
Для уменьшения времени торможения или реверса иногда применяют данный режим. Реализация этого режима возможна на работающем двигателе при смене полярности питающего напряжения. В этом случае направления ЭДС двигателя и напряжения сети совпадает
![]() ,
,
что без ограничения тока якоря приводит к большим величинам тока якоря, что является недопустимым.
Величина тормозного сопротивления выбирается по формуле
![]() .
.
Торможение противовключением применяется в основном для реверса двигателя. Для точного останова двигателя данным режим не удобен, так как требуется довольно точная настройка аппаратуры для того, чтобы остановить двигатель в точке нулевой скорости. Если же двигатель не отключить от сети, то он перейдет в двигательный режим, и в дальнейшем разгонится до номинальной скорости при наличии номинального момента на валу двигателя. Для точной остановки двигателя используется режим динамического торможения.
Схема включения двигателя для данного режима показана на рис. 3.6, в, а характеристики на рис. 3.7 (характеристика 3).