

2.5.2. Инженерный расчет передаточной функции контура регулирования тока якоря
Для большинства систем подчиненного регулирования параметров в электроприводах постоянного тока контур регулирования является внутренним. С него начинают расчет и настройку многоконтурной системы. Оптимизированный токовый контур представляет собой составную часть объекта управления в контуре регулирования скорости вращения электродвигателя. От его быстродействия в значительной мере зависят динамические качества всей системы управления электроприводом. Структурная схема контура регулирования тока без учета влияния ЭДС двигателя представлена на рис. 2.9. Объектом управления контура регулирования тока является тиристорный преобразователь и якорная цепь электродвигателя.
Согласно принятым на практике критерием оптимизации по модульному и симметричному оптимам [16], регулятор тока РТ выбирают интегрально-пропорциональным [13].
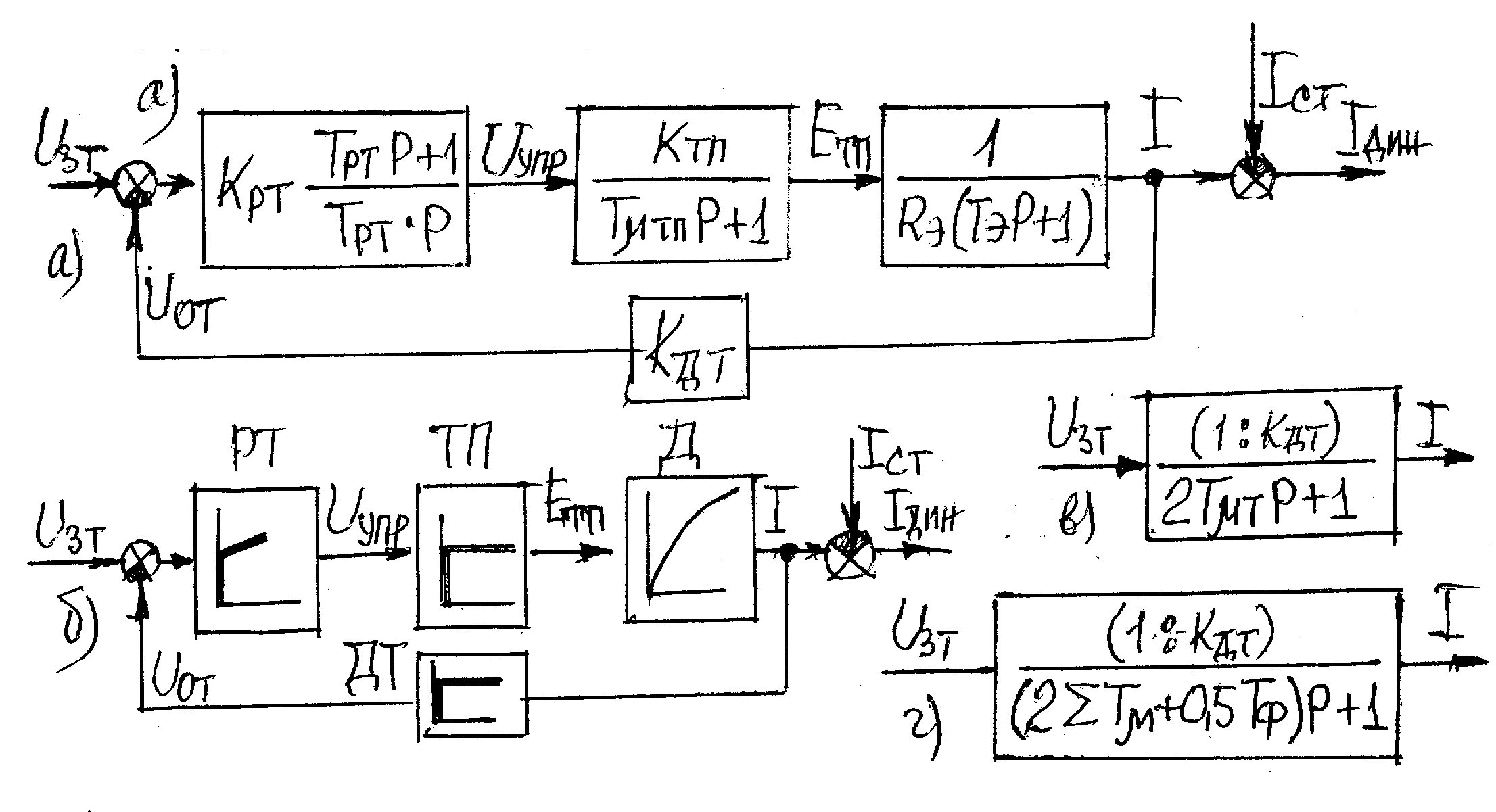
Рис. 2.9. Структурная (а) и функциональная (б) схемы контура регулирования тока. Передаточные функции замкнутого контура регулирования тока при его оптимизации по МО – оптимуму (в) и SO – оптимуму (г).
На схеме рис. 2.9, а показана передаточная функция ПИ-регулятора тока, а на рис. 2.9,б та же схема представлена в функциональном виде, где вместо передаточных функций звеньев изображены их передаточные функции при скачкообразном входном сигнале. На рис. 2.9 в и г представлены передаточные функции контура регулирования тока, как звена оптимизированного по МО(в) и SO(г) оптимумам.
Инженерный расчет представленного на рис. 2.9.а контура регулирования тока дан в учебном пособии [15].
Выбор
критерия оптимизации зависит от величины
отношения электромагнитной постоянной
времени якорной цепи Тэ, определенной
согласно (2.22), и суммы малых постоянных
времени передаточных звеньев контура
![]() в его прямом
ПР
и обратном
обр
каналах, т.е.:
в его прямом
ПР
и обратном
обр
каналах, т.е.:
![]() ; (2.37)
; (2.37)
Сумма
постоянных времени в прямом канале
складывается из постоянной преобразователя
![]() ТП
(2.8) и постоянных регулятора тока и
потенциального разделителя между
выходом регулятора и входом СИФУ, а
ОБР
– из постоянных датчика тока и фильтра
в цепи обратной связи по току, который
включают при необходимости снижения
уровня пульсаций.
ТП
(2.8) и постоянных регулятора тока и
потенциального разделителя между
выходом регулятора и входом СИФУ, а
ОБР
– из постоянных датчика тока и фильтра
в цепи обратной связи по току, который
включают при необходимости снижения
уровня пульсаций.
Найденную величину Тэ сравнивают с величиной 4 . Если Тэ:(4 )<1, то оптимизация контура регулирования тока выполняют по МО-оптимуму [15], а его передаточная функция выражаются формулой:
![]() (2.38)
(2.38)
где:
![]() - сопротивления решающих цепей регулятора
тока соответственно в обратной связи
и канале задания;
- сопротивления решающих цепей регулятора
тока соответственно в обратной связи
и канале задания;
Кдт – коэффициент передачи датчика тока, определяемый отношением максимального входного напряжения для регулятора (9.2 – 9.5)В к допустимому току перегрузки комплектного электропривода (В:А);
ТТ – эквивалентная постоянная времени токового контура равная:
![]() (2.39)
(2.39)
Вот – оптимальная величина эквивалентной постоянной времени токового контура, определяемая по выражению:
![]() ; (2.40)
; (2.40)
ТПР, ТОБР – суммы малых постоянных времени в прямом и обратном каналах регуляторе (см. 2.37);
Коэффициент усиления регулятора тока, обеспечивающий оптимизацию контура по МО-оптимуму, находится по выражению:
![]() (2.40
а)
(2.40
а)
Если
![]() то оптимизация контура регулирования
тока проводится по SO-оптимуму
[15], а его оптимизированная передаточная
функция определяется выражением:
то оптимизация контура регулирования
тока проводится по SO-оптимуму
[15], а его оптимизированная передаточная
функция определяется выражением:
![]() (2.41)
(2.41)
где:
![]() - сумма малых постоянных времени
передаточных звеньев контура регулирования
тока согласно (2.37);
- сумма малых постоянных времени
передаточных звеньев контура регулирования
тока согласно (2.37);
Тф – постоянная фильтра на входе регулятора тока, выбираемая согласно рекомендации табл. 2.1.
Коэффициент усиления регулятора тока, обеспечивающий оптимизацию контура по SO-оптимуму, находится по выражению:
![]() (2.41а)
(2.41а)
где: - сумма малых постоянных времени контура согласно (2.37).