

П. 8.4. Регулирование положения.
Общие требования к системам управления электроприводами с регулированием положения были приведены в п. 1.9.1. Такие электроприводы применяются для приведения исполнительного органа механизма в заранее заданное положение, слежения за положением другого механизма при взаимной синхронизации двух электроприводов по положению. Системы управления такими электроприводами имеют внешний (основной) контур положения и подчиненные ему контуры скорости и тока, которые выполнены по тем же схемам, что и описанные ранее.
Схема регулятора положения в значительной мере зависит от типа примененного датчика положения. По ХЭМЗ и ЗПО «Преобразователь» в своих серийных поставках применяют сельсинные схема измерения положения. Во многих случаях обеспечиваемая при этом точность является достаточной. Если же требуется более высокая точность, то применяют цифровые системы управления.
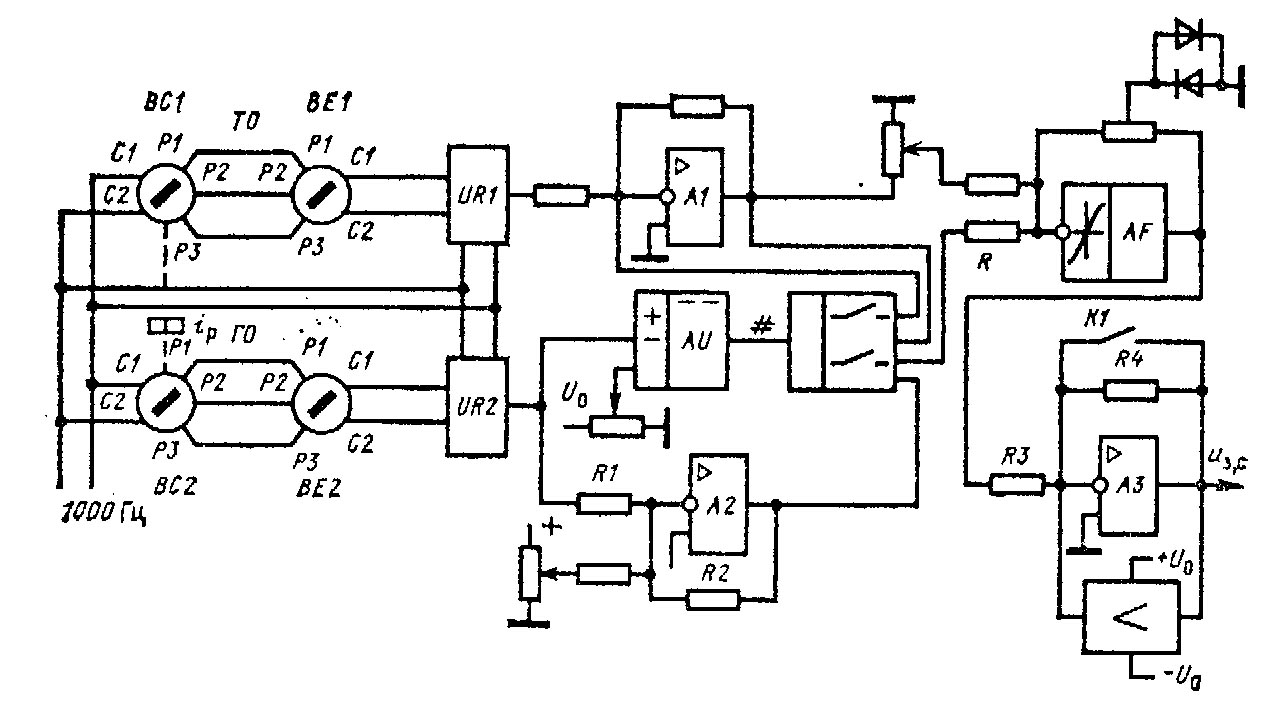
Рисунок 3.23. Регулятор положения электроприводов серии КТЭУ.
Схема регулятора положения, примененная в электроприводах серии КТЭУ, приведена на рисунке 3.23. Предполагается, что для измерения положения используются системы «грубого» ВС2 и «точного» ВС1 отсчетов, связанные между собой редуктором, повышающим от ВС2 к ВС1, с передаточным числом iР. выходные напряжения сельсинов-приемников ВЕ1, ВЕ2 выпрямляются фазочувствительными выпрямителями UR1, UR2, усиливаются усилителями А1, А2 и подаются на функциональный преобразователь AF. Смещение на входе усилителя А2 служит для предотвращения «застревания» системы в положении ложного нуля при четном передаточном числе iP. Устройство селекции, выполненное на нуль-органе AU и ключе К, пропускает на вход AF напряжение точного отсчета при uUR2<U0 и напряжение «грубого» отсчета при uUR2>U0 . Благодаря наличию диодов в цепи обратной связи AF характеристика последнего имеет зону нечувствительности. Собственно статическая характеристика AF имеет линейный участок с коэффициентом усиления k0 и нелинейный участок. В цепи обратной связи усилителя А3 установлено устройство ограничения для задания максимальной скорости, а также контакт реле К1 отключения регулятора положения. Частота среза контура положения:
![]() (3.23)
(3.23)
Схема регулятора положения ЗПО «преобразователь» близка к изображенной на рисунке 3.23 без канала точного отсчета и здесь не приводится.
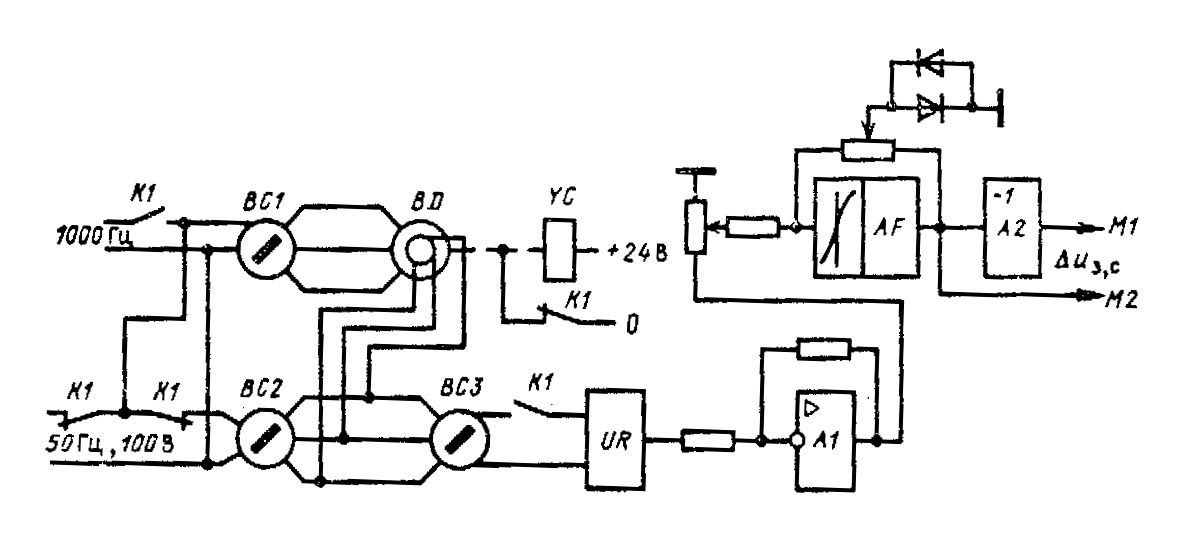
Рисунок 3.24. Взаимная синхронизация двух электроприводов серии КТЭУ.
Схема электрической синхронизации двух электроприводов приведена на рисунке 3.24. Сельсины-датчики ВС1, ВС3 связаны с исполнительными органами двух механизмов. При их совместной работе дифференциальный сельсин BD заторможен тормозом YC, и входное напряжение фазочувствительного выпрямителя UR пропорционально рассогласованию по положению обоих механизмов с учетом фазового сдвига за счет сельсина BD, при этом реле К1 включено и на входе регуляторов скорости поступает напряжение рассогласования uЗ,С с противоположными знаками. В режиме раздельной работы реле К1 отключено, сельсин BD расторможен, сельсины ВС1, BD, ВС2 (который также связан со вторым механизмом) питаются напряжением 110 В, 50 Гц, что увеличивает синхронизирующий момент сельсинов. Ротор сельсина BD устанавливаются в такое положение, что магнитная связь между его обмотками минимальна. Так как ротор сельсина ВС2 развернут на 90 относительно ВС3, то после включения реле К1 напряжение на выходе UR равно нулю, т.е. сельсины согласованы.
Цифровые системы регулирования положения применяются при высоких требованиях к точности позиционирования. Так как цифровое измерение положения обычно требует цифровых задатчиков положения для различных режимов, цифровой индикации и т.п., то обычно такого рода системы оказываются индивидуального применения и представляет собой типовую систему регулирования скорости или положения и дополнительные цифровые блоки. В качестве примера рассмотрим цифровую систему регулирования положения двух взаимосвязанных электроприводов, разработанную для нажимных винтов одного из станов холодной прокатки.
Система содержит два отдельных электропривода с регуляторами скорости. Установленные в них зля задания скорости используются в режиме раздельного управления. Для обеспечения всех предъявляемых к электроприводу требований устанавливаются дополнительные задатчик интенсивности для общего задания скорости при ручном управлении, узлы измерения перемещения обоих винтов и использованием импульсных датчиков, регулирования положения обоих винтов при их совместном перемещении, задания положения, электрической синхронизации перемещения обоих винтов.
В системе регулирования предусмотрена возможность одновременной отработки заданий на совместную и раздельную работу нажимных винтов. При этом раздельной работе отдается приоритет, и исключается возможность превышения ограничений по скорости и току путем воздействия на задатчик интенсивности общего задания.
В качестве датчиков положения использованы импульсные датчики типа ПДФ3, связанные с левым и правым нажимными винтами и обеспечивающие дискретность 0,01 мм. Измерение положения осуществляется реверсивными 16-разрядными счетчиками. В качестве кода обратной связи принята полусумма положений обоих винтов. Узел задания положения содержит регистр-счетчик, на вход которого поступает код задания положения, причем возможна предварительная установка трех значений этого кода в зависимости от режима работы прокатного стана. Собственно регулятор положения состоит из арифметического устройства, работающего в режиме вычитания, преобразователя код – напряжение, функционального преобразователя и дешифратора.
Схема электрической синхронизации содержит реверсивный счетчик, на вход суммирования которого поступает импульсы от одного датчика, а на вход вычитания – от другого, так что код счетчика равен интегралу от рассогласования. При начальной установке в счетчик записывается число, равное половине его максимального кода. На выходе счетчика установлен преобразователь код – напряжение, причем смещение на его входе компенсирует начальный код, так что напряжение на выходе преобразователя пропорционально интегралу от рассогласования. Такая схема синхронизации имеет преимущества перед сельсиной, в частности, облегчена установка начальной синхронизации, поэтому она применяется и без цифрового регулятора положения. Вся цифровая часть схемы выполнена на элементах УБСР-ДИ малой и средней степени интеграции.