

Функциональные схемы регуляторов, используемых в комплектных тиристорных электроприводов и соотношения для настройки (п. 1.9). П. 8.1. Регулятор тока якоря.
Регулятор тока якоря получает сигнал задания uз.т. с выхода регулятора скорости или какого-либо другого устройства (в специальных электроприводах), сигнал обратной связи uд.т. с выхода датчика тока. На выходе он формирует напряжение управления uу в СИФУ ТП, определяющее угол управления . Схема простейшего регулятора тока изображена на рис. 3.1.

Рисунок 3.1. Простейший регулятор тока.
Параметры регулятора выбираются по соотношениям:
![]() (3.1)
(3.1)
причем T равна сумме постоянных времени аналоговых элементов в контуре, фильтра на входе СИФУ и среднестатического запаздывания ТП, равного 1,67 мс. В современных системах управления собственными постоянными времени аналоговых элементов можно пренебречь, а постоянная времени фильтра не превышает 1 мс.
Сигнал обратной связи по току снимается с шунта, установленного в главной цепи; датчик тока осуществляет гальваническое разделение цепей управления от главных цепей и усиление по напряжению.
Возможно также использование датчика тока на основе трансформаторов тока, установленных на стороне переменного тока ТП, и ключей, изменяющих полярность обратной связи при переключении выпрямительных мостов.
На регулятор тока возлагают также другие функции: ограничение скорости нарастания тока di/dt, улучшение динамики контура тока в зоне прерывистого тока, компенсация влияния ЭДС двигателя на характеристики контура, обеспечение режима стоянки электродвигателя, управление переключением выпрямительных мостов реверсивного ТП.
На рисунке 3.2
показан регулятор тока электроприводов
серии КТЭУ мощностью до 2000 кВт. В составе
регулятора имеются усилитель А1 с
ограничителем di/dt
, А2 – собственно регулятор тока, А3 –
внутренний регулятор напряжения, А4 –
апериодический фильтр в цепи обратной
связи по напряжению. При замыкании ключа
К1 на время паузы прекращается
интегрирование напряжения задания
тока. Ключ К2 замыкается при стоянке
электропривода, чем обеспечивается
надежная стоянка электродвигателя.
Наличие контура напряжения улучшает
динамику электропривода в режиме
прерывистых токов ТП, так как коэффициент
усиления регулятора в этом режиме
возрастает в
![]() раз по сравнению с режимом непрерывного
тока. Передаточная функция регулятора
близка к передаточной функции чистого
интегратора.
раз по сравнению с режимом непрерывного
тока. Передаточная функция регулятора
близка к передаточной функции чистого
интегратора.
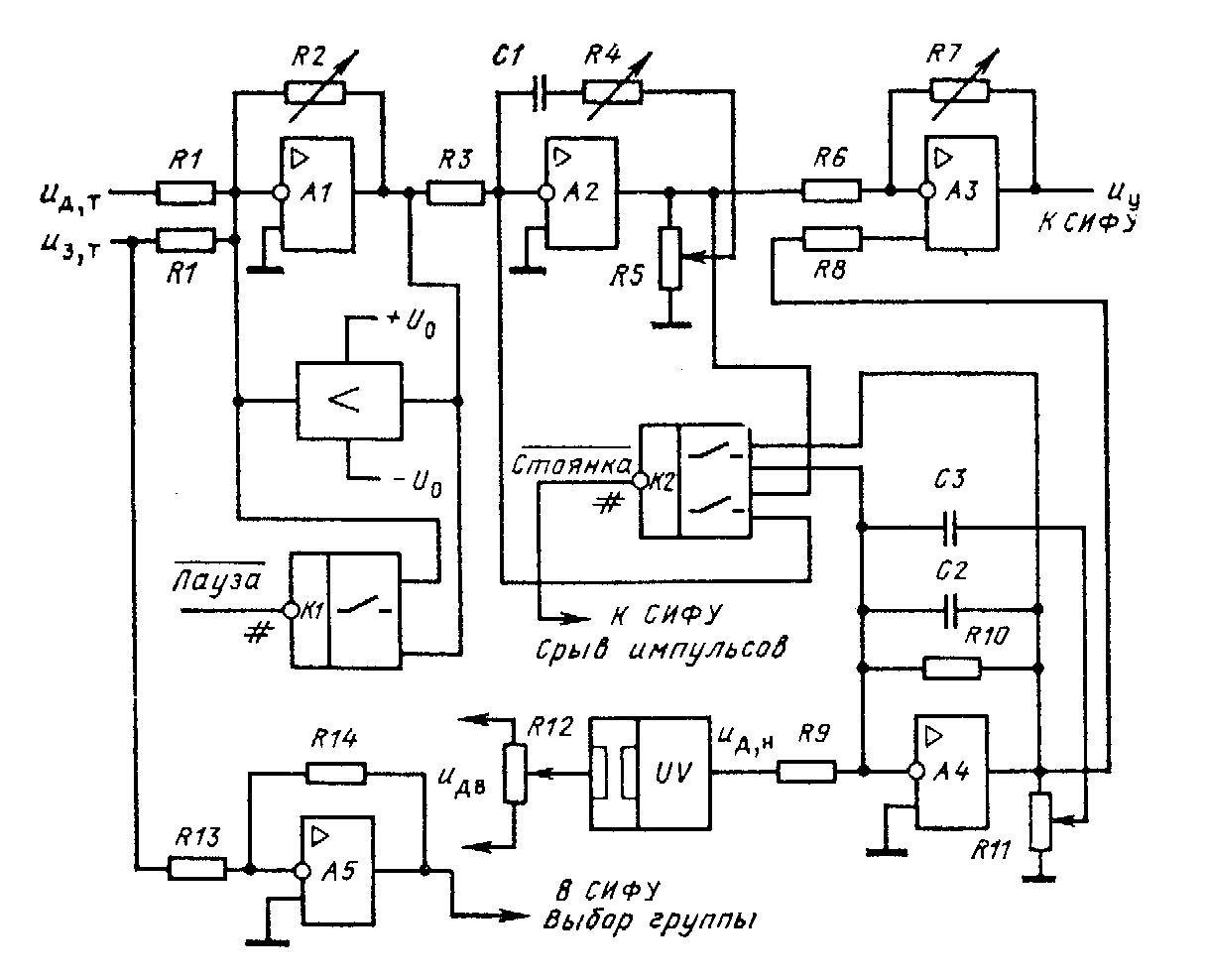
Рисунок 3.2. регулятор тока серии КТЭУ мощностью 2000 кВт:
R1 = R13 = 20 кОм, R3 = 100 кОм, R6 = R8 = 10 кОм, R9 = R10 = 100 кОм, R14 = 200 кОм,
С1 = С3 = 1 мкФ, С2 = 0,1 мкФ.
![]() (3.2)
(3.2)
Условие устойчивости в режиме прерывистого тока имеет вид (при m=6)
![]() (3.3)
(3.3)
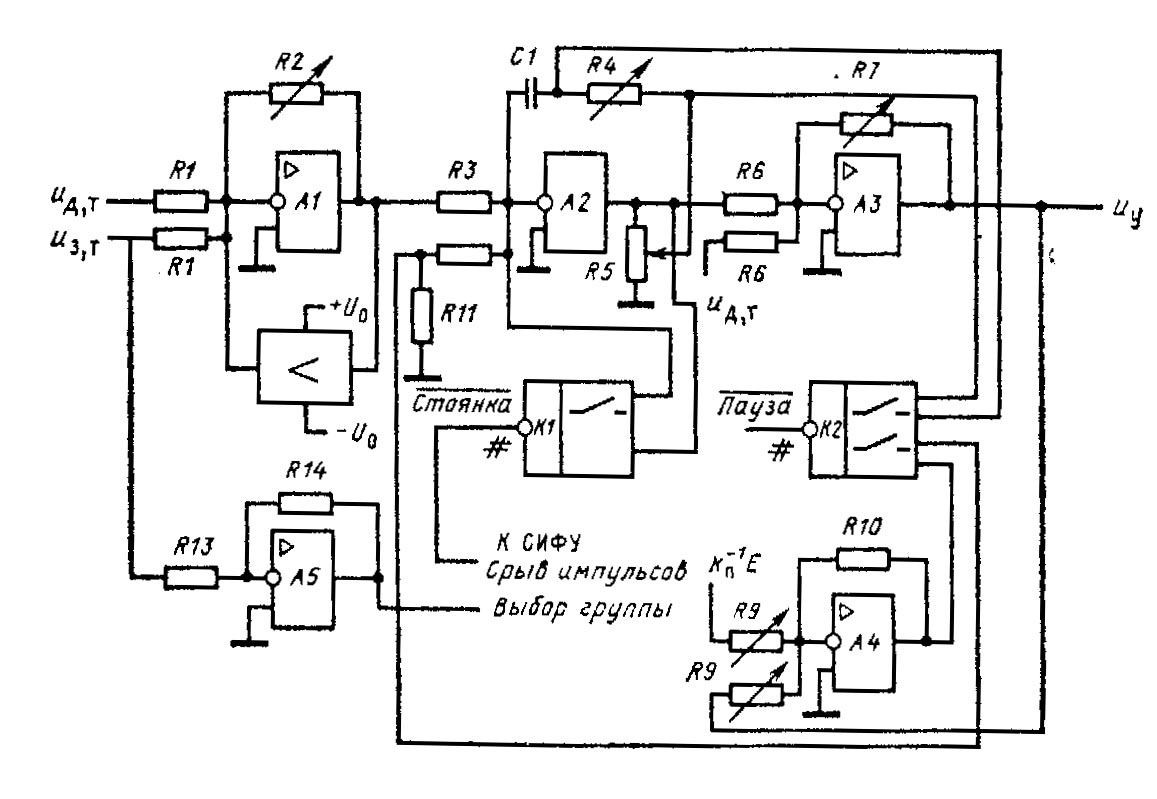 Рисунок
3.3. Регулятор тока для одномостовых ТП
серии КТЭУ мощностью 1000 – 12000 кВт:
Рисунок
3.3. Регулятор тока для одномостовых ТП
серии КТЭУ мощностью 1000 – 12000 кВт:
R8 = 2,4 кОм; R10 = 200 кОм; R11 = 5 кОм, остальные данные – см. рис. 3.2.
Если необходимость в улучшении динамических характеристик в режиме прерывистого тока отсутствует ,то связь по напряжению исключается, при этом:
![]() (3.4)
(3.4)
Полярность сигнала задания тока через усилитель А5 определяет нужный выпрямительный мост, переключение на который происходит после спадания тока нагрузки ТП до нуля и окончания отсчета паузы (см. разд. 2). Если же в СИФУ применяется автоколебательная логика, то выход А5 не используется.
Сигнал обратной связи формируется датчиком тока, подсоединенным к шунту.
На рис. 3.3 приведена схема регулятора тока, используемая в электроприводах серии КТЭУ мощностью 1000 – 12000 кВт. В отличие от схема рис. 3.2 внутренний контур напряжения заменен внутренним контуром тока. В режиме прерывистого тока в момент формирования очередного отпирающего импульса ток нагрузки ТП равен нулю, поэтому наличие внутренней цепи обратной связи не влияет на угол отпирания, она в этом режиме исчезает. Коэффициент усиления регулятора тока увеличивается в R7/R6 раз, а передаточная функция регулятора тока приближается к передаточной функции чистого интегратора. Выбор настраиваемых параметров регулятора осуществляется по соотношениям
 (3.5)
(3.5)
Сопротивления резисторов R1 и R2 выбираются так же, как и в схеме рис. 3.2.
В описываемую
схему введен узел слежения напряжения
uy за
значением ЭДС двигателя Е во время
бестоковой паузы. Смысл введения этого
узла заключается в том, что в некоторых
случаях, например, при напряжении uз,т,
полярность сигнала uд,т
на входе регулятора может не соответствовать
истинной полярности тока, что вызовет
накопление сигнала на выходе интегратора
А2 в направлении запирания работающего
моста ТП. После переключения мостов
этот сигнал будет соответствовать уже
выпрямительному режиму и вызовет большие
броски тока – вплоть до срабатывания
защиты. Наличие узла слежения приводит
напряжение uy
к напряжению
![]() так
что накопленная до наступления паузы
погрешность уменьшается до нуля.
так
что накопленная до наступления паузы
погрешность уменьшается до нуля.
Узел слежения
состоит из усилителя А4, входной сигнал
которого равен разности
![]() ,
и ключа К2, который во время паузы
подключает выход А4 на вход усилителя
А2. Ключ К3 закорачивает резистор R4
в этом режиме, что увеличивает скорость
отработки рассогласования. Сопротивление
резисторов R9
выбирается из условия:
,
и ключа К2, который во время паузы
подключает выход А4 на вход усилителя
А2. Ключ К3 закорачивает резистор R4
в этом режиме, что увеличивает скорость
отработки рассогласования. Сопротивление
резисторов R9
выбирается из условия:
![]() (0,31)
104 , (3.6)
(0,31)
104 , (3.6)
В серии ЭКТ регулятор тока также выполнен по схеме, показанной на рис. 3.3, причем функция ограничения di/dt на усилителе А1 исключена. Параметры в этой схеме таковы: R1=R3=40 кОм, R2=540 кОм, R8=1,5 кОм, С1=0,1 мкФ. Резистор R5 из цепи обратной связи усилителя А2 исключен.
Частота среза контура настраивается резистором R2:
![]() (3.7)
(3.7)
где R2 принимается в килоомах.
В этой серии электроприводов выбор выпрямительной группы в реверсивных ТП осуществляется полярность сигнала задания тока uз,т, а при малом значении этого сигнала в режиме прерывистого тока переключение групп осуществляется автоколебательной логикой.
Изображенная на рис. 3.3 схема регулятора применяется в нижнем по мощности отрезке серии КТЭУ 1000 – 12000кВт для одномостовых ТП. Мощные электроприводы выполняются по схеме с двумя параллельно включенными ТП, напряжение питания которых сдвинуты относительно друг друга на 30 (см. рис. 1.9). В этом случае на регулятор тока возлагается также функция выравнивания токов нагрузки параллельно включенных ТП. В рассматриваемой серии это достигается использованием двух регуляторов тока с общим сигналом задания uз,т. Каждый регулятор получает сигнал обратной связи от «своего»ТП (рис. 3.4).
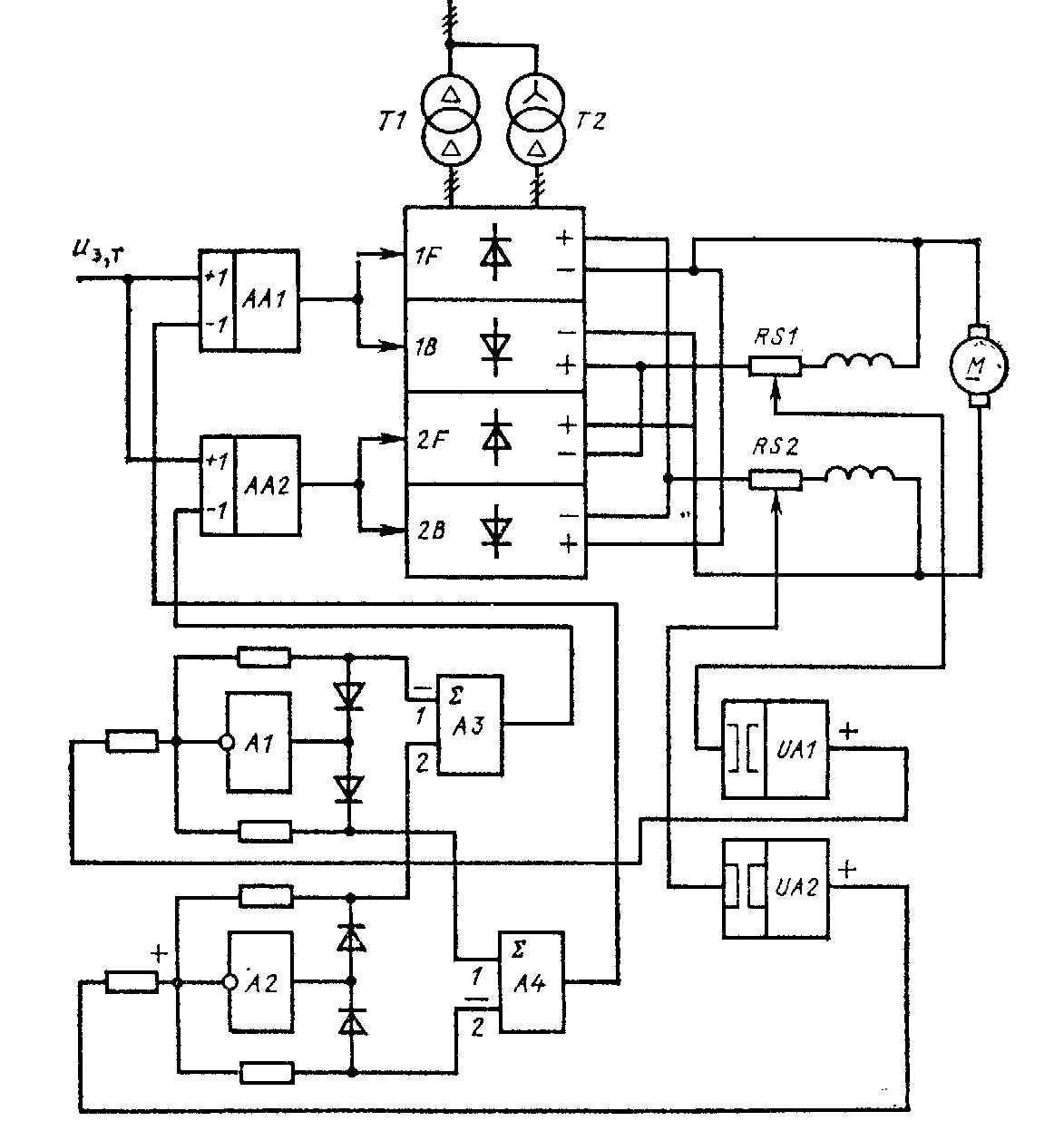
Рисунок 3.4. Регулирование тока в двухмостовом ТП с параллельно соединенными мостами.
Через измерительные шунты протекают токи нагрузки одного или другого ТП в зависимости от того, какая выпрямительная группа работает в данный момент. Схема регулирования содержит узлы выделения сигналов датчиков тока, собранные на усилителях А1 – А4.
При работе мостов 1F, 2F на выходах датчиков тока UA1, UA2 появляются напряжения положительной полярности, которые поступают на вход 1 сумматора А3 и на вход 2 сумматора А4, при этом по шунту RS1 протекает ток от группы 2F, а по шунту RS2 - от группы1F. Таким образом, на вход регулятора АА1 поступает сигнал тока нагрузки от группы 1F, а на вход регулятора АА2 – от группы 2F. При работе групп 1B, 2B по шунту RS2 протекает ток от группы 2B, а по шунту RS1 – от группы 1В. На выходах датчиков тока полярность напряжения при этом изменяется. Теперь напряжения будут поступать на вход 2 сумматора А3 и на вход 1 сумматора А4, т.е. на вход регулятора АА1 будет подаваться в качестве обратной связи сигнал тока нагрузки от группы 1В, а на вход регулятора АА2 – от группы 2В. Собственно регуляторы тока выполнены по схеме, изображенной на рис. 3.3.

Рисунок 3.5. Регулятор тока ЗПО «Преобразователь»:
R1=100 кОм, R2= 3 кОм, R4= R5= 51 кОм, R6= R7= R8= 10 кОм, С2 = 0,1 мкФ,
С3= 0,015 мкФ, R3, С1 – подбираются при наладке.
На рисунке 3.5 показана схема регулятора тока, используемого в серии КТЭ. Усилитель А1 является пропорционально-интегральным регулятором тока. Ключ К3 замыкается при стоянке привода, ключ К1 отключает входы регулятора во время бестоковой паузы. Апериодической звено, выполненное на усилителе А3, формирует сигнал эталонного переходного процесса, на усилителе А4 к сигналу выхода регулятора тока добавляется разность между сигналами эталонного и фактического переходных процессов.
Наличие эталонной модели А3 позволяет при неточной настройке параметров регулятора получить удовлетворительный переходный процесс, что упрощает наладку.
В режиме прерывистого тока наличие модели также улучшает динамику контура, однако недостаточно, поэтому в регуляторе предусматривается перестройка параметров регулятора в функции среднего значения тока. Генератор G формирует пилообразные колебания ug , которые на компараторе AU сравниваются с модулем сигнала выхода модели, т.е. со средним значением тока Id . Пока среднее значение сигнала тока превышает амплитуду пилообразного напряжения, компаратор AU находится в таком состоянии, что ключ К2, включенный на его выходе, ток не пропускает. При уменьшении среднего значения тока ключ AU открывается на промежуток времени, в течение которого ug>kд,тId , при этом K2 замыкается и входное сопротивление регулятора существенно уменьшается , увеличивая тем самым коэффициент усиления регулятора. Чем меньше Id , тем больше время, в течение которого ug>kд,тId , и тем больше коэффициент усиления регулятора. При замыкании ключа K2 усилитель А1 переводится в режим чистого интегратора.
На рисунке 3.6 приведена схема регулятора тока, который применяется в электроприводах серии ЭТУ3601. На усилителе А1 собрано пропорционально-интегральное звено. Сигнал обратной связи по току формируется с помощью трансформаторов тока ТА, вторичное напряжение которых выпрямляется выпрямителем V со средней точкой. На выходе выпрямителя образуются напряжения обеих полярностей, а на вход регулятора через ключи B и F подается сигнал той полярности, которая соответствует работающей выпрямительной группе. Выходное напряжение усилителя А1 ограничивается с помощью резистора R4. Когда усилитель А1 не насыщен, то сопротивление резистора R4 не влияет на выходное напряжение А1. Когда же А1 находится в насыщении, то его выходное напряжение определяется напряжением насыщения и делителем напряжения R3-R4.
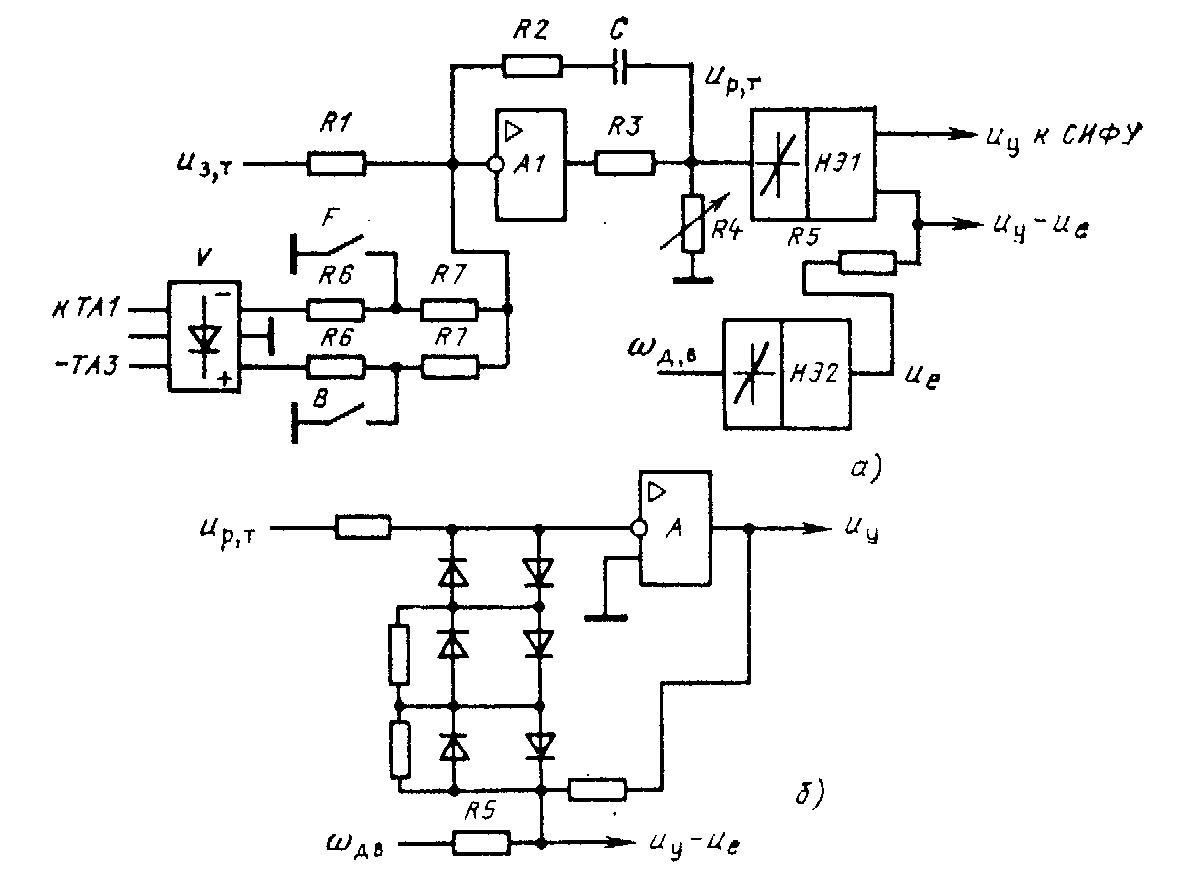
Рисунок 3.6. Регулятор тока электроприводов типа ЭТУ3601:
А – структурная схема; б – схема элемента НЭ1; R1 = 47 кОм, R2 =4,7 кОм, R3 = 2,7 кОм, R6 =20 кОм, R7 = 36 кОм, R7 = 36 кОм, R =0,47 мкФ.
На выходе регулятора тока включен нелинейный элемент НЭ1, предназначенный для линеаризации характеристик контура в режиме прерывистого тока. Характеристика этого элемента обратна регулировочной характеристике ТП и описывается соотношением 16:
![]() ,
,
где
![]()
![]()
![]() .
.
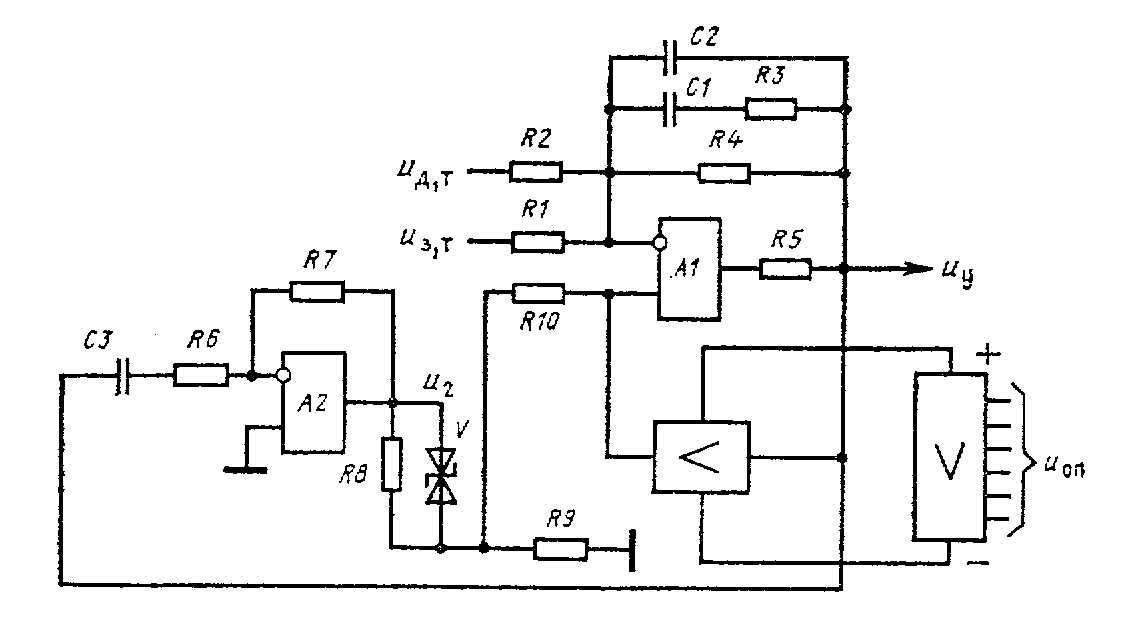
Рисунок 3.7. Регулятор тока электропривода серии ЭТ6:
R1= R2= 2 кОм, R3= 43 кОм, R4= 910 кОм, R5= 100 Ом, R6= 15 кОм, R7= 510 кОм,
R8=10 кОм, R9= 200 Ом, С1= 2 мкФ, С2= С3=0,068 мкФ.
Нелинейный элемент НЭ2 преобразует напряжение тахогенератора, пропорциональное ЭДС двигателя (так как его поток возбуждения постоянен), в такое напряжение ue, что в режиме холостого хода двигателя uр,т = 0, т.е. реализует зависимость 16
![]() (3.8)
(3.8)
Реализация узла НЭ1 показана на рис. 3.6, б. Полярность напряжения uр,т определяет выпрямительный мост. Такой способ выбора группы применим благодаря введению напряжения ue , соответствующего холостому ходу ТП, поэтому полярность uр,т такая же, как и требуемые направления протекания тока в нагрузке ТП.
На рис. 3.7 показан регулятор тока электропривода серии ЭТ6. В схеме регулятора конденсатор С2 и резистор R4 корректируют частотную характеристику усилителя А1, а резистор R5 защищает усилитель А1 от коротких замыканий. Входными напряжениями узла ограничения в обратной связи усилителя А1 являются опорные напряжения из схемы СИФУ UОП , чем обеспечивается ограничение минимального угла отпирания тиристоров. Усилитель А2 с дифференцирующей цепочкой на входе ограничивает скорость изменения управляющего напряжения. Когда duy/dt достигает такого значения, что выходное напряжение усилителя u2 превышает пробивное напряжение стабилитрона V, напряжение u2 оказывается приложенным к неинвертирующему входу А1, ограничивая скорость изменения его выхода.
Регуляторы тока электроприводов серий ЭТ3 и ЭТРП выполняются по схеме рис. 3.1, но с тем отличием, что в электроприводах серии ЭТРП, у которых предусмотрено рекуперативное торможение изменением полярности потока возбуждения, во время переходного процесса, связанного с изменением направления протекания тока возбуждения, на вход регулятора подается напряжение обратной полярности по отношению к uз.т , при этом ТП переходит в инверторный режим и ток нагрузки спадает до нуля.
В заключении отметим, что в электроприводах серии ЭПУ1 и реверсивных электроприводах серии ЭПУ2 используется жесткая отрицательная связь по току на вход СИФУ, нереверсивные электроприводы серии ЭПУ2 с обратной связью по скорости имеют токовую отсечку, а с обратной связью по ЭДС – регулятор тока (см. рис. 3.1).