1. Расчёт линейных непрерывных сау по заданной точности в установившемся режиме Передаточные функции сау
На рисунке 3 показана структурная схема линейной САУ с единичной обратной связью, где Хз=G ; W(p) и Woc(p) – передаточные функции элементов системы, находящихся в основном тракте и в канале главной обратной связи; Wf(p) – передаточная функция разомкнутой системы по возмущающему воздействию.
Рассмотрим воздействие по каждому входу независимо от других.
Передаточная функция замкнутой системы по управляющему воздействию (при f=0) имеет вид
![]() (1)
(1)
Передаточная функция замкнутой системы по возмущающему воздействию
![]()
![]() (2)
(2)
При исследовании точности системы управления в установившемся режиме целесообразно располагать выражениями для передаточной функции ошибки замкнутой системы по управляющему и возмущающему воздействиям:
![]() (3)
(3)
![]() (4)
(4)
Если система имеет единичную обратную связь, то в формулах (1)-(4)
Woc(p)=1.
С помощью передаточных функций замкнутой системы на основании принципа суперпозиции получаем изображения выходной величины и сигнала ошибки:
![]() (5)
(5)
![]()
Составляющая
ошибки
![]() называется ошибкой по управляющему
воздействию, она зависит от управляющего
воздействия;
составляющая ошибки
называется ошибкой по управляющему
воздействию, она зависит от управляющего
воздействия;
составляющая ошибки
![]() соответственно – ошибкой по возмущающему
воздействию.
соответственно – ошибкой по возмущающему
воздействию.
Определение установившихся ошибок в системах автоматического управления.
Обеспечение необходимой точности воспроизведения задающего (управляющего) сигнала в установившемся режиме – одно из основных требований, которым должна удовлетворять система автоматического управления. Для оценки точности системы определяют установившуюся ошибку, которую можно получить из (5) с помощью теоремы о конечном значении функции:
![]() (6)
(6)
Если управляющее воздействие g(t) имеет произвольный характер, то ошибку системы можно найти с помощью коэффициентов ошибок. На основании (3) и (5) определим изображение ошибки по управляющему воздействию системы с обратной связью:
![]() (7)
(7)
Передаточную функцию представим в виде ряда
![]() (8)
(8)
сходящегося при малых p, что соответствует установившемуся режиму или достаточно большим значениям времени.
Коэффициенты этого ряда называются коэффициентами ошибок.
Они определяются с помощью выражений
(9)
или непосредственным делением полинома числителя на полином знаменателя передаточной функции.
Коэффициенты С0, С1, и Сn называются соответственно коэффициентами позиционной, скоростной и ошибки от ускорения.
Выразим установившуюся ошибку через коэффициенты ошибок, управляющее воздействие и его производные с учетом приведенных формул и [1-4]:
![]() (10)
(10)
Аналогично можно ввести понятие коэффициентов ошибок по возмущающему воздействию.
1.2 Точность сау при типовых воздействиях
Как правило, работу САУ анализируют при типовых воздействиях, близких к реальным управляющим и возмущающим воздействиям в нормальных или в наиболее трудных режимах работы.
Рассмотрим
установившийся режим системы с единичной
обратной связью при постоянных возмущающих
(![]() )
и управляющих (
)
и управляющих (![]() ) воздействиях. В этом случае ошибка
системы называется статической [1-2]
и находится с помощью выражения
) воздействиях. В этом случае ошибка
системы называется статической [1-2]
и находится с помощью выражения
![]() (11)
(11)
В статических системах автоматического управления W(0)=k , где k. - коэффициент передачи разомкнутой системы. Составляющая статической ошибки от управляющего воздействия
![]() (12)
(12)
Составляющая статической ошибки от возмущающего воздействия
![]() (13)
(13)
где
![]() - коэффициент передачи системы между
точками приложения возмущения и выхода
системы (коэффициент передачи разомкнутой
системы по возмущающему воздействию).
- коэффициент передачи системы между
точками приложения возмущения и выхода
системы (коэффициент передачи разомкнутой
системы по возмущающему воздействию).
Кроме ошибок этих двух составляющих иногда необходимо учитывать и ошибку чувствительного элемента ч.э. который не является идеальным.
Результирующая статическая ошибка системы управления имеет вид
![]() (14)
(14)
В
астатических системах управления
![]() ,
поэтому составляющая ошибки
,
поэтому составляющая ошибки
![]() ,
Вторая составляющая ошибки
,
Вторая составляющая ошибки
![]() при
при
![]() не всегда обращается в нуль, так как
возможен случай, когда и
не всегда обращается в нуль, так как
возможен случай, когда и
![]() .
При включении интегрирующего
(астатического) звена в цепь обратной
связи относительно приложенного
возмущения и выхода системы статическая
ошибка системы при постоянном возмущающем
воздействии обращается в нуль. Однако
повышение порядка астатизма в следящих
системах за счет включения интегрирующих
звеньев в прямой цепи системы не может
исключить ошибку чувствительного
элемента, которую следует рассматривать
как эквивалентное постоянное возмущение.
.
При включении интегрирующего
(астатического) звена в цепь обратной
связи относительно приложенного
возмущения и выхода системы статическая
ошибка системы при постоянном возмущающем
воздействии обращается в нуль. Однако
повышение порядка астатизма в следящих
системах за счет включения интегрирующих
звеньев в прямой цепи системы не может
исключить ошибку чувствительного
элемента, которую следует рассматривать
как эквивалентное постоянное возмущение.
Режим работы при постоянных управляющих и возмущающих воздействиях наиболее характерен для систем автоматической стабилизации.
Рассмотрим
установившееся состояние при изменении
управляющего воздействия с постоянной
скоростью
![]() (где
(где
![]() )
и при постоянном значении возмущающего
воздействия
)
и при постоянном значении возмущающего
воздействия
![]() ,
по (6) найдем установившуюся ошибку:
,
по (6) найдем установившуюся ошибку:
![]() (15)
(15)
Система автоматического управления или следящая система, работающая в режиме слежения с постоянной скоростью, должна быть астатической относительно управляющего воздействия, так как первый, член выражения (15) в статической системе при W(0)=k стремится к бесконечности.
Второе слагаемое определяет статическую ошибку системы от возмущающего воздействия, в которую также необходимо включить ошибку чувствительного элемента.
Для системы с астатизмом первого порядка установившаяся ошибка от управляющего воздействия
![]() (16)
(16)
где
![]() - коэффициент передачи (добротность)
системы по скорости.
- коэффициент передачи (добротность)
системы по скорости.
Ошибка
![]() называется скоростной ошибкой от
управляющего воздействия.
называется скоростной ошибкой от
управляющего воздействия.
Скоростная
ошибка в системе с астатизмом второго
порядка и выше равна нулю (так как
![]() ), поэтому режим с управляющим
воздействием, изменяющимся с
постоянной скоростью, используется
только для оценки точности следящих
систем с астатизмом первого порядка.
), поэтому режим с управляющим
воздействием, изменяющимся с
постоянной скоростью, используется
только для оценки точности следящих
систем с астатизмом первого порядка.
Рассмотрим
установившийся режим в системе при
изменении управляющего воздействия
с постоянным ускорением
![]() (где
(где
![]() )
и при постоянном значении возмущающего
воздействия
.
)
и при постоянном значении возмущающего
воздействия
.
Установившаяся ошибка определяется аналогично (6):
![]() (17)
(17)
Этот режим имеет смысл только для следящих систем с астатизмом второго порядка, так как в статической и астатической системах первого порядка первая составляющая ошибки стремится к нулю. Ошибка по управляющему воздействию для следящих систем с астатизмом второго порядка имеет вид
![]() (18)
(18)
где
 - коэффициент передачи (добротность)
системы по ускорению.
- коэффициент передачи (добротность)
системы по ускорению.
Ошибка называется установившейся ошибкой системы от ускорения. Этот режим работы обычно применяется для оценки точности следящих систем с астатизмом второго порядка.
Второе слагаемое, как и в предыдущем случае, вместе с ошибкой чувствительного элемента определяет статическую ошибку системы от возмущающего воздействия.
Рассмотрим установившийся режим системы регулирования при изменении управляющего воздействия по гармоническому закону:
![]() (19)
(19)
Предположим,
что возмущающее воздействие равно нулю.
В этом случае ошибка в установившемся
режиме также изменяется по гармоническому
закону с частотой
![]() :
:
![]()
Точность системы в этом режиме можно оценить по амплитуде ошибки, которая находится из (5) подставкой р=jωk (при f=0) и определением модуля подученного выражения:
![]() . (20)
. (20)
При |W(jωk)|>>1
![]() (21)
(21)
где R(ωk) - модуль частотной характеристики разомкнутой системы.
Выражение (21) удобно применять, если используется метод логарифмических частотных характеристик.
В статических системах коэффициент усиления определяет значение статической ошибки. Другими словами, установившееся значение регулируемой величины будет тем меньше отличаться от своего первоначального значения, чем большим коэффициентом усиления обладает система. Следовательно, с точки зрения статической точности регулирования, коэффициент усиления нужно увеличивать. Однако по мере роста коэффициента усиления при прочих равных условиях ухудшается устойчивость системы.
Система неустойчива, если свободная составляющая переходного процесса от возмущающего воздействия на выходе системы с течением времени неограниченно возрастает. Поведение свободной составляющей зависит от расположения корней характеристического уравнения замкнутой системы на комплексной плоскости.
Правила, позволяющие определить расположение корней характеристического уравнения на комплексной плоскости без нахождения значений самих корней и тем самым определить устойчивость системы, называются критериями устойчивости.
2. ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ СИСТЕМЫ С ПОМОЩЬЮ КРИТЕРИЕВ
2.1. Критерий Гурвица
Устойчивость системы по критерию Гурвица исследуется с помощью характеристического уравнения замкнутой системы вида
![]() (22)
(22)
Формулировка критерия Гурвица:
система устойчива, если при a0>0 определитель, составленный по определенному правилу из коэффициентов характеристического уравнения, и все его диагональные миноры больше нуля.
Определитель Гурвица составляется по следующему правилу:
1) по главной диагонали выписываются все коэффициенты характеристического уравнения начиная с a1;
2) места вверх от диагонали заполняются коэффициентами с возрастающими индексами, а вниз - с убывающими; если такие коэффициенты отсутствуют, ставят нуль.
Для получения диагональных миноров из определителя вычеркивают нижние строки и крайние столбцы.
Пример определителя Гурвица для характеристического уравнения четвертого порядка:
 (23)
(23)
Как правило, при исследовании устойчивости по критерию Гурвица не вычисляют определитель и все его диагональные миноры. Достаточное условие устойчивости для системы четвертого порядка - положительность всех коэффициентов и диагонального минора третьего порядка:
 (24)
(24)
2.2. Критерий Михайлова
Критерий применяется обычно при сравнительно высоких степенях характеристического уравнения. Был предложен Михайловым В.М. в 1938 г.
Формулировка критерия Михайлова: система автоматического управления устойчива, если годограф вектора Михайлова при изменении частоты ω от 0 до ∞ начинается при ω=0 положительной вещественной полуоси и обходит в положительном направлении (против хода часовой стрелки) последовательно n квадрантов, нигде не обращаясь в нуль (где n– порядок характеристического уравнения системы).
Методом подстановки р=(jω) в характеристический полином
![]() (25)
(25)
получают вектор Михайлова
![]() (26)
(26)
Вещественные члены выражения D (jω) , получаемые при четных степенях, и мнимые, получаемые при нечетных, группируются следующим образом:
D (jω) = А(ω)+jB(ω) , (27)
где
![]() (28)
(28)
Годограф Михайлова имеет вид кривой, описанной концом вектора D(jω)на комплексной плоскости [A;jB] при изменении частоты ω от 0 до ∞ .
Порядок построения годографа:
1) задаются рядом значений частоты и вычисляют соответствующие им
значения A(ω) и B(ω);
2) откладывают эти значения на осях координат комплексной плоскости;
3) соединяют полученные точки и получают искомую кривую. Вид годографа вектора Михайлова показан на рис. 4.
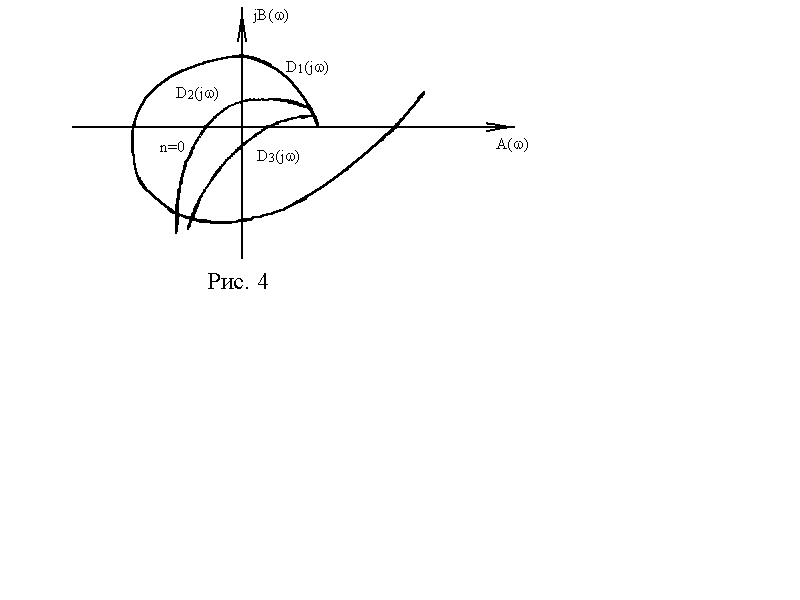
Согласно определению критерия Михайлова кривые D1(jω) и D2(jω) соответствуют устойчивой, D3(jω) – неустойчивой системам.
Если годограф D(jω) проходит через начало координат, то система находится на границе устойчивости.
Влияние некоторого параметра Т на устойчивость системы можно определить следующим образом. Строится ряд годографов Михайлова, каждый из которых соответствует определенному значению исследуемого параметра. Влияние Т на устойчивость определяют по расположению годографов. Значение T, при котором годограф проходит через начало координат, является критическим. Однако значительно удобнее исследовать влияние параметров с помощью следствия критерия Михайлова (вторая формулировка). В этом случае об устойчивости судят по виду кривых А(ω) и B(ω) без построения годографа Михайлова D(jω) .
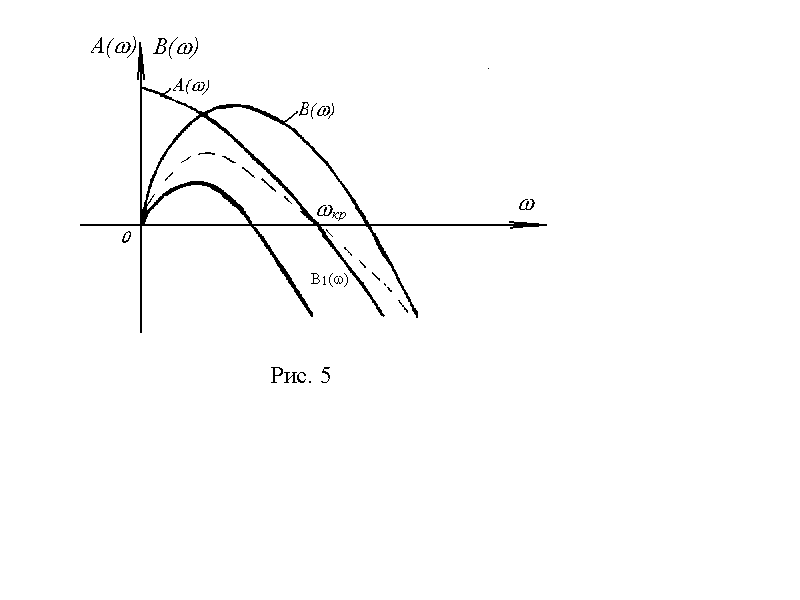
Вторая формулировка критерия Михайлова: система будет устойчивой, если корни кривых A(ω) и B(ω) будут вещественными, т.е. будут иметь пересечения с осью ω , и перемежающимися, т.е. вначале с осью ω пересекается кривая А(ω) , а затем В(ω) и т.д.
На рис. 5 показаны кривые А(ω) и B(ω) для устойчивой CAP и А1 (ω) , В1 (ω) - для неустойчивой.
Если кривые А(ω) и B(ω) пересекаются в одной точке на оси ω , то система находится на границе устойчивости. Значение частоты, соответствующее точке пересечения кривых, называют критическим.