

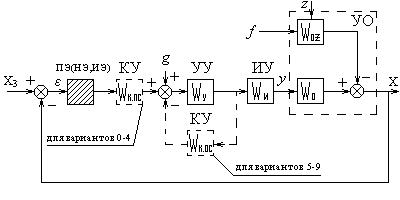
В курсовой работе необходимо выполнить комплекс расчётов автоматической системы управления, задаваемой в виде обобщённой унифицированной алгоритмической схемы (рис. 1). Система состоит из объекта управления ОУ, исполнительного устройства ИУ, управляющего устройства и одного корректирующего устройства, включенного либо последовательно, либо встречно-параллельно в основной контур системы. В зависимости от варианта задания исполнительное устройство системы может рассматриваться как идеальное интегрирующее звено или как инерционное звено первого порядка. Соответственно вся система будет астатической или статической.
На разных этапах выполнения курсовой работы автоматическую систему рассматривают как линейную (с линейным преобразующим элементом ПЭ), нелинейную (введением вместо преобразующего элемента нелинейного элемента с заданным уровнем нелинейности) или импульсную (введением вместо преобразующего элемента ПЭ элемента дискретизации ИЭ).
Выходная величина объекта Х (управляемая величина системы) зависит от управляющего воздействия и возмущающего воздействия f .
Требуемый закон изменения величины Х определяется задающим воздействием Хз. Кроме основного возмущающего воздействия на систему влияет помеха z. Поскольку на систему действуют оба возмущения, а также из-за инерционности элементов системы в переходных и установившихся режимах возникает сигнал отклонения (сигнал ошибки ).
Содержание курсовой работы
Курсовая работа состоит из девяти разделов.
1. Оценка точности системы.
Точность статической системы оценивается при ступенчатом воздействии. Точность астатической системы – при линейном воздействии. Методика расчёта точности системы приведена в (1;2).
2. Проверка устойчивости исходной системы.
Проверяется устойчивость нескорректированной системы с исходными, постоянными времени и с выбранным (по требуемой точности) значением общего передаточного коэффициента.
Устойчивость – одна из наиболее важных характеристик автоматической СУ, наряду с точностью. От устойчивости системы зависит её работоспособность. В курсовой работе необходима устойчивость системы по методу, указанному в таблице выбора заданий по анализу устойчивости и качеству системы (см. табл.3).
3. Расчёт корректирующего устройства.
![]()
рис.1
Осуществляется с помощью логарифмических частотных характеристик. Результаты расчёта – передаточная функция, параметры и принципиальная схема корректирующего устройства.
Метод расчёта корректирующего устройства с помощью логарифмических частотных характеристик основан на связи переходного процесса с действительной частотной характеристикой
Р() замкнутой системы и ЛАЧХ L() разомкнутого контура. Благодаря этой связи можно по указанным показателям переходного процесса построить так называемую желаемую характеристику Lcк() – характеристику скорректированной системы, соответствующую требуемым показателям качества. Зная желаемую Lcк() и исходную,
Нескорректированную Lн() характеристики, можно найти требуемую характеристику корректирующего устройства Lк(). Для расчёта корректирующего устройства рекомендуется использовать методику из (2;3).
При выборе корректирующего устройства по справочным таблицам допускается приближённая замена требуемой характеристики. Построение характеристик разомкнутой и замкнутой систем целесообразно осуществить с применением ЭВМ.
4. Построение области устойчивости скорректированной системы.
Выполняется согласно методике описанной в (3;4).
После построения области устойчивости скорректированной системы необходимо на рисунке показать точку, соответствующую принятым значениям параметров.
5. Построение графика переходного процесса и оценка качества скорректированной системы.
Необходимо построить график переходного процесса в скорректированной системы, вызванного единичным ступенчатым воздействием.
Качество системы оценивается по форме переходного процесса, числу полуколебаний, первому максимальному отклонению, длительности и перерегулированию. Значение двух последних показателей сравнивают с требуемыми значениями (5;6).
6. Вычисление и минимизация квадратичной интегральной оценки при типовом воздействии.
Квадратичная интегральная оценка наиболее широко используется для исследования колебательных систем. Квадратичная оценка учитывает размер и длительность отклонений.
Квадратичная интегральная оценка вычисляется при заданном типовом (линейном или ступенчатом) воздействии (см. табл.2) при этом допускается упрощение передаточной функции скорректированной системы приравниванием наименьшей постоянной времени (исходной системы) к нулю.
Минимум интегральной оценки и оптимального значения передаточного коэффициента рекомендуется определить непосредственно по графику функции I=f(ку), построенного по точкам (4-6).
Вычисление и минимизация дисперсии сигнала ошибки при случайных воздействиях.
При вычислении и минимизации дисперсии сигнала ошибки скорректированной системы также рекомендуется упрощение передаточной функции и использование графика минимизированной функции Д=f(ку), построенного по точкам (1-4).
Анализ нелинейной системы.
Так как нелинейная система образована из нескорректированной системы заменой преобразующего элемента ПЭ нелинейным элементом НЭ (см. табл.4), то в начале необходимо провести алгоритмическую схему нелинейной системы, состоящей из линейной и нелинейной частей и отражающую конкретный вид статической характеристики нелинейного элемента.
Если согласно заданию нелинейная система анализируется методом фазовых траекторий, линейная часть нескорректированной системы может быть упрощена до второго порядка (приравниванием к нулю наименьшей постоянной времени) (6-9).
Анализ импульсной системы.
Импульсная система образуется из нескорректированной линейной системы заменой элемента ПЭ импульсным элементом ИЭ.
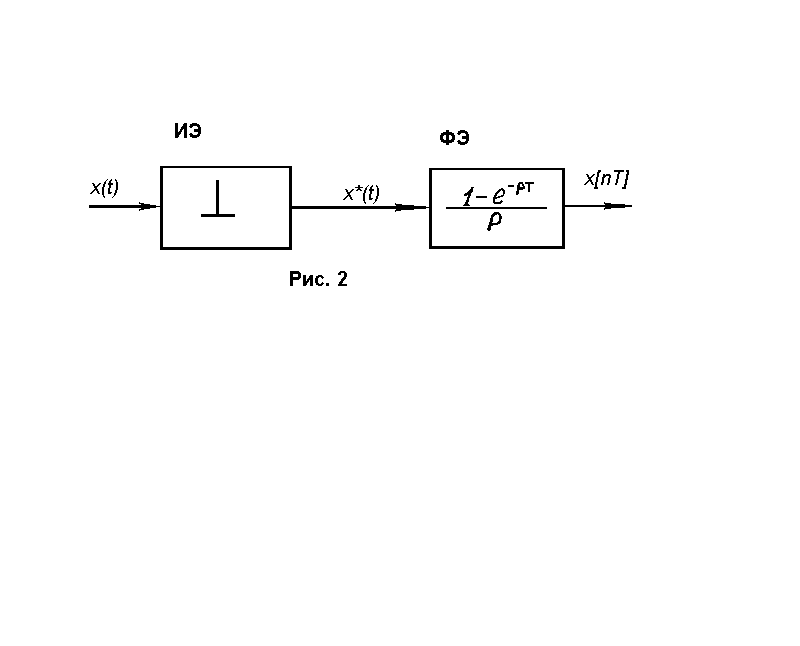
Необходимо в начале привести алгоритмическую схему импульсной системы. Импульсный элемент ИЭ (рис. 2) состоит из простейшего импульсного элемента ПИЭ («ключа») и формирующего элемента ВЭ в виде фиксатора с параметрами
Киэ=I , н=Т , =1 .
При выполнении разделов 5,7-9, кроме основных расчётов по аналитическим выражениям рекомендуется производить моделирование системы на ЭВМ и сравнивать результаты моделирования с результатами основных расчётов.