

Федеральное агентство по образованию
Архангельский государственный технический университет
Лабораторные работы по теории механизмов и машин
________________________________________
Методические указания к выполнению
лабораторных работ
по теории механизмов и машин
Архангельск
2009
Рассмотрены и рекомендованы к изданию
методической комиссией механического факультета
Архангельского государственного технического университета
30 Декабря 2008 г.
Составители:
Т. В. Цветкова, ст. преп.
М. Ю. Кабакова, доц., канд. техн. наук
Рецензент:
Н. И. Дундин., канд. техн. наук, доц. кафедры прикладной
механики и основ конструирования АГТУ
УДК 621.81
Цветкова Т. В., Кабакова М. Ю. Лабораторные работы по теории механизмов и машин. Методические указания к выполнению лабораторных работ по теории механизмов и машин. Цветкова Т. В., Кабакова М. Ю. –Архангельск: Изд-во Арханг. гос. техн. ун-та, 2009. – 60 с.
Подготовлены кафедрой прикладной механики и основ конструирования.
В методических указаниях излагается методика выполнения лабораторных работ по теории механизмов и машин: «Структурный анализ механизмов», «Профилирование зубьев колеса звольвентного профиля методом огибания (обката)» и «Кинематический анализ эпициклических механизмов». Указания содержат минимум теоретических сведений, необходимых для выполнения работ, а также примеры выполнения.
Предназначены для студентов всех форм обучения, изучающих дисциплину « Теория механизмов и машин».
Табл. 7. Прил. 3. Рис. 23. Библиогр. 5 назв.
© Архангельский государственный
технический университет, 2009
© Т. В. Цветкова, М. Ю. Кабакова, 2009
______________________________________________________________
ЛАБОРАТОРНАЯ РАБОТА №1
СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМОВ
Цель работы: ознакомиться с классификацией кинематических пар и механизмов.
СОДЕРЖАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ
ЛАБОРАТОРНОЙ РАБОТЫ
1. Выполнить эскиз реальной кинематической пары в аксонометрии.
2. Дать условное изображение кинематической пары.
3. Определить класс кинематической пары и название по типу касания звеньев и соединения их в пару.
4. Выполнить кинематическую схему полученного механизма.
5. Определить степень подвижности механизма.
6. Определить класс и порядок механизма.
КИНЕМАТИЧЕСКАЯ ПАРА
Соединение двух соприкасающихся звеньев, допускающее их относительное движение, называется кинематической парой.
Для кинематических пар характерны следующие признаки:
классы, элементы касания звеньев, типы соединения звеньев в пару.
1. Классы
Класс кинематической пары определяется числом ограниченных степеней свободы (S). Таким образом, у пар 1-го класса ограничена одна степень свободы, у пар 2-го класса – две степени свободы и т.д.
![]()
где Н – число движений звеньев, входящих в пару.
2. Элементы касания звеньев
Если элементом касания звеньев является точка или линия, то пара называется высшей.
Если элементом касания является плоскость или поверхность, то пара называется низшей.
3. Тип соединения звеньев в пару
Пара называется геометрически замкнутой, если соединение
звеньев обеспечивается их конструкцией.
Пара будет иметь силовое соединение, если контакт элементов обеспечивается под действием силы.
Звенья в механизме соединяются между собой кинематическими парами. Если соединяются два звена, то будет одна кинематическая пара. Если соединяются три звена, то будет две кинематических пары. Если соединяются n звеньев, то будет n–1 кинематических пар (сложный шарнир).
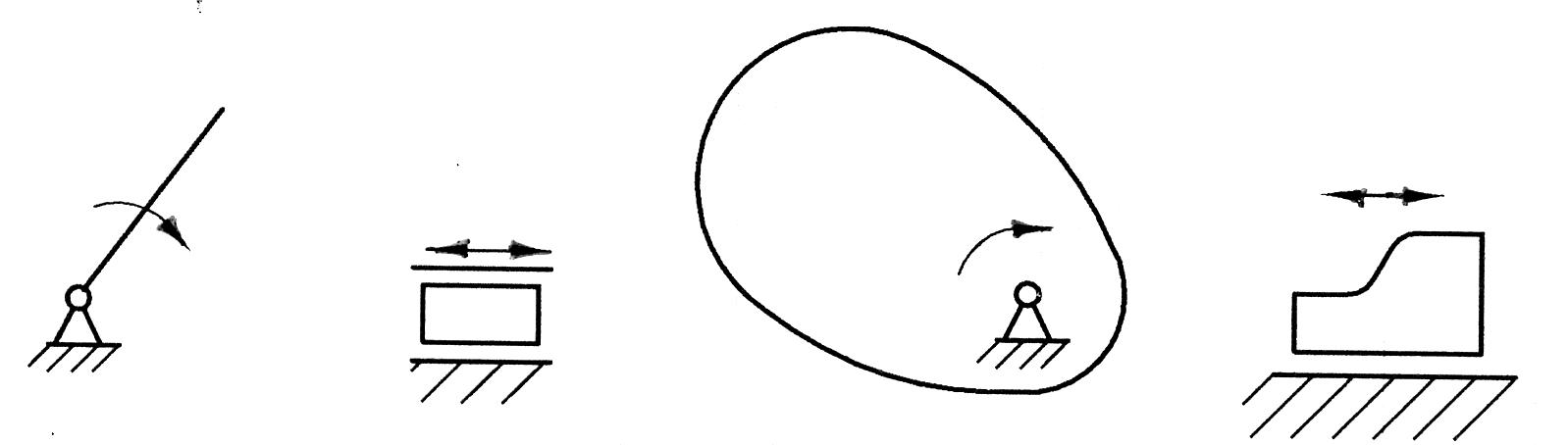
В табл. 1 приведены схемы и условные обозначения наиболее часто встречающихся видов кинематических пар.
Таблица 1
Пространственная схема (пример) |
Условное обозначение |
Кинематическая пара |
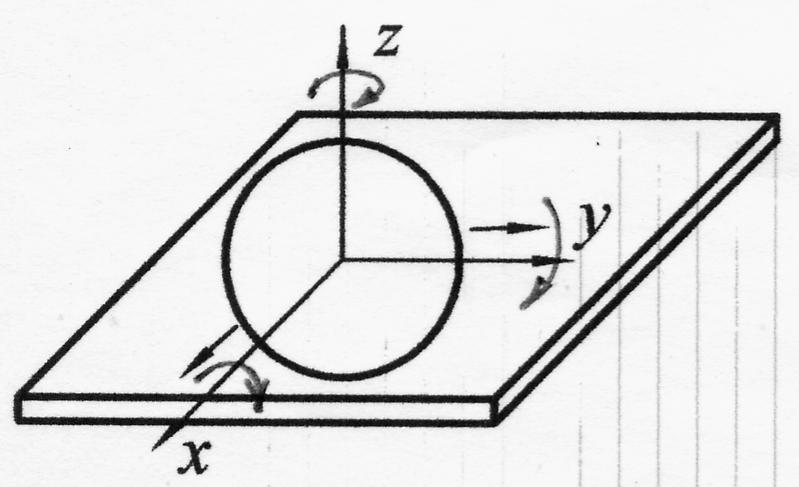
Шар на плоскости |
|
Точечная кинематическая пара 1-го класса с силовым замыканием, высшая
|
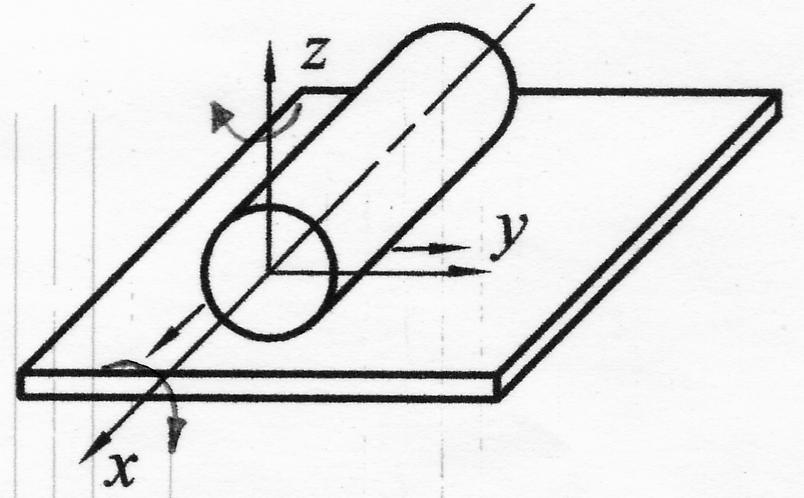
Цилиндр
на плоскости |
|
Кинематическая пара 2-го класса с силовым замыканием, высшая |
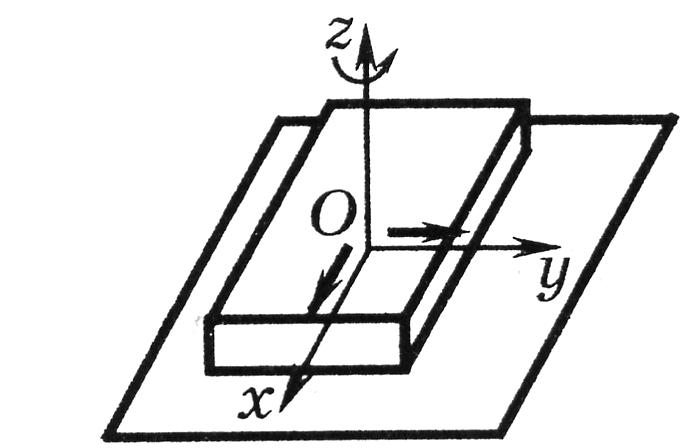
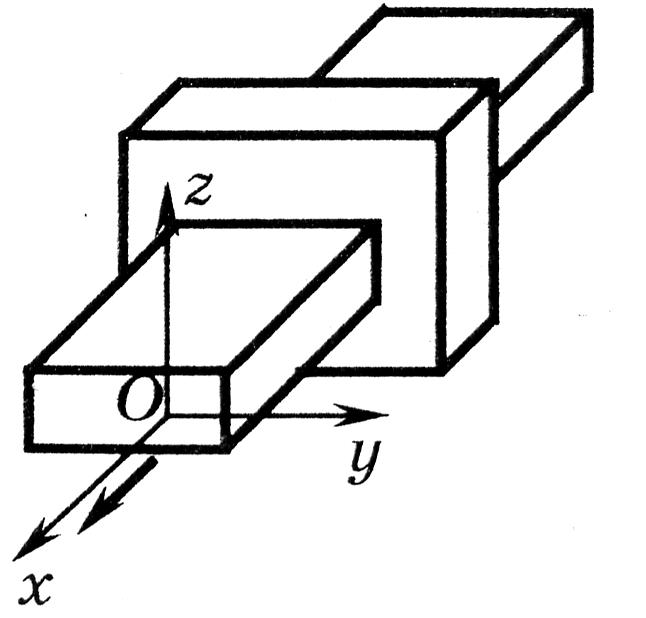
Призма на
плоскости |
|
Кинематическая пара 3-го класса с силовым замыканием, низшая |
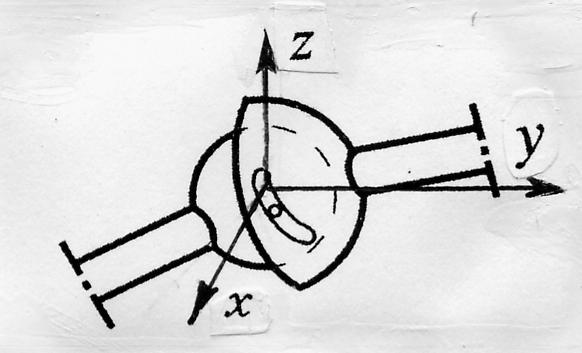
Сферическая
|
|
Сферическая кинематическая пара 3-го класса с геометрическим замыканием, низшая |
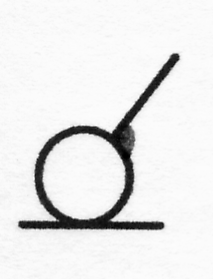
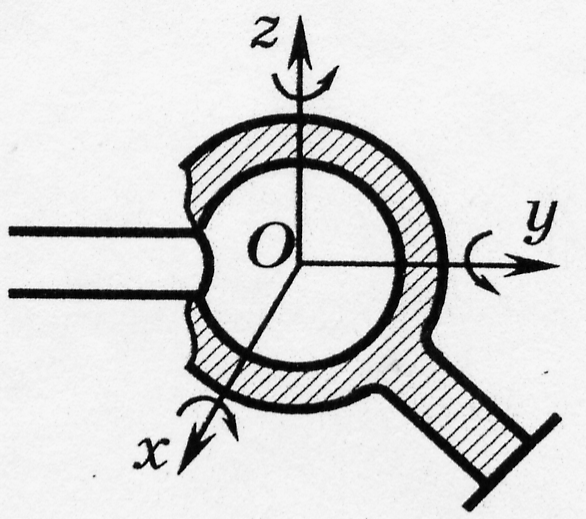
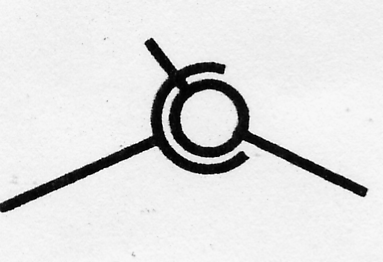
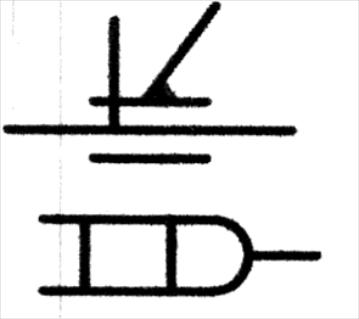
Сферическая с
пальцем |
|
Кинематическая пара 4-го класса с геометрическим замыканием, низшая |
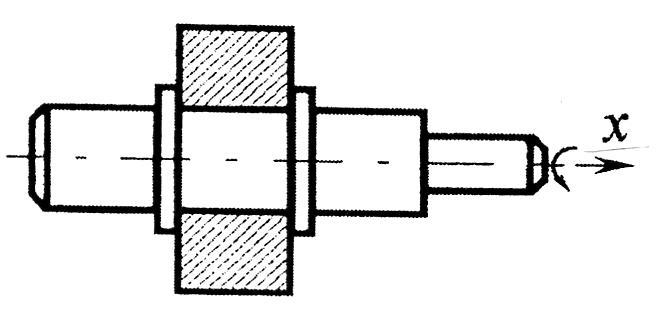
Цилиндрическая
|
|
Цилиндрическая кинематическая пара 4-го класса с геометрическим замыканием, низшая
|

Продолжение табл. 1
Пространственная схема (пример) |
Условное обозначение |
Кинематическая пара |
В
|
|
Вращательная кинематическая пара 5-го класса с геометрическим замыканием, низшая
|
П |
|
Поступательная кинематическая пара 5-го класса с геометрическим замыканием, низшая |
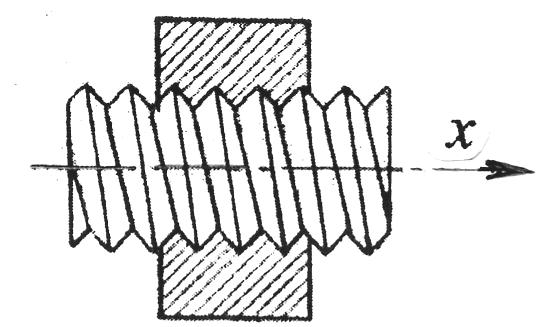
В |
|
Винтовая кинематическая пара 5-го класса с геометрическим замыканием, низшая |
 ращательная
ращательная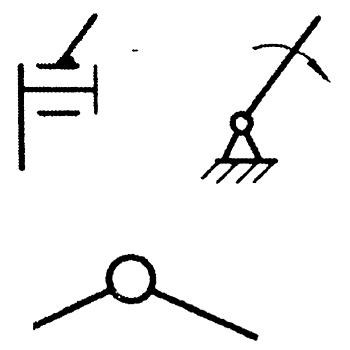
 оступательная
оступательная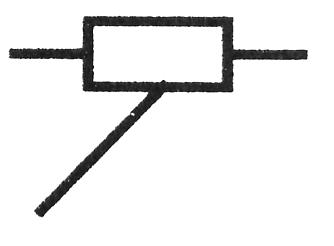
 интовая
интовая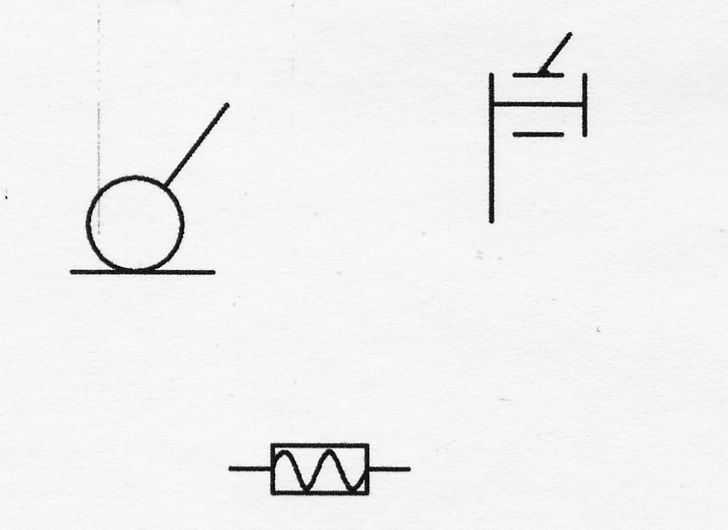
МЕХАНИЗМ
Принцип образования механизмов был впервые сформулирован выдающимся русским ученым профессором Л. В. Ассуром в 1914 г.
Он состоит в следующем:
любой механизм может быть образован путем последовательного присоединения к входному звену и стойке кинематических цепей с нулевой степенью подвижности (группы Ассура).
Известно, что в состав каждого механизма входят: неподвижное звено (стойка), входные звенья, законы движения которых заданы, выходные звенья, законы движения которых зависят от законов движения входных звеньев, а также могут входить промежуточные звенья.
Рычажный механизм состоит из звеньев:
Звенья рычажного механизма:
- ползун – совершает возвратно-поступательное движение;
- кривошип – совершает вращательное движение (полный оборот вокруг неподвижной оси);
- шатун – совершает сложное плоскопараллельное движение (звено, образующее кинематические пары только с подвижными звеньями);
- коромысло (качающееся звено) – совершает неполный оборот вокруг оси;
- кулиса – звено совершающее поступательное, вращательное или
качательное движение, по которому перемещается кулисный камень;
- камень – звено кулисного механизма, совершающее поступательное движение относительно кулисы (в случае качающегося камня кулиса движется поступательно относительно камня);
- стойка – неподвижное звено любого механизма.
Если входное звено не задано, то его можно выбрать в зависимости от характера движения механизма, который нужно получить. Число входных звеньев должно быть равно числу степеней подвижности механизма.
В современном машиностроении широкое применение получили плоские механизмы.
Степень подвижности такого механизма определяется по формуле П.Л.Чебышева:
![]()
где W – число степеней подвижности;
3 – число движений, которыми обладает звено на плоскости;
n – число подвижных звеньев;
p5, p4 – число кинематических пар 5-го и 4-го классов.
Группа начальных звеньев
В группу начальных звеньев обязательно входит стойка (станина) и входное звено.
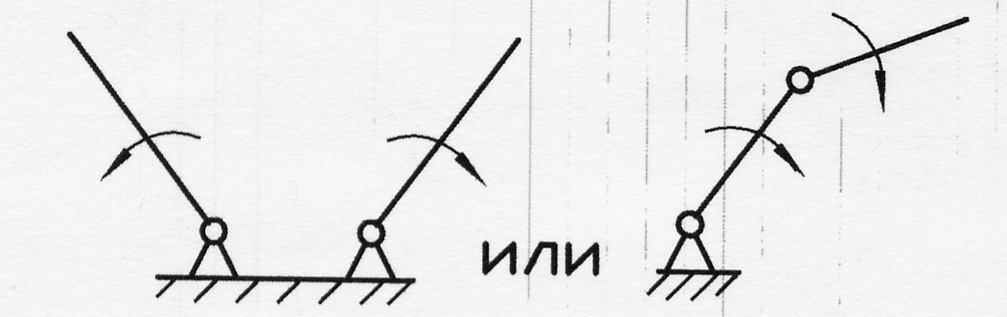
При степени подвижности механизма W = 1 группа начальных
звеньев может быть представлена в вариантах, показанных на рис. 1, а.
Если W =2, то группа начальных звеньев может быть представлена в вариантах, показанных на рис. 1,б.
а б
Рис. 1. Группы начальных звеньев: а – при W = 1; б – при W = 2
Структурная группа (группа Ассура) – кинематическая цепь, содержащая четное число подвижных звеньев, в случае присоединения которой элементами свободных кинематических пар к стойке образуется система с нулевой степенью подвижности.
Для проведения структурного анализа механизма необходимо выделить начальную группу звеньев, а оставшуюся часть разложить на структурные группы в определенной последовательности:
а) отсоединение структурных групп начинать с наиболее удаленных от входного звена;
б) после отсоединения первой группы продолжают отсоединять от оставшейся кинематической цепи следующую группу, проверив степень подвижности оставшихся звеньев.
В результате разложения должно остаться одно входное звено, если степень подвижности всего механизма была равна единице; если степень подвижности всего механизма равна двум, то должно остаться два входных звена.
Примечания:
1– При разделении механизма на структурные группы следует иметь в виду, что одна и та же кинематическая пара может входить только в одну структурную группу;
2– При разделении структурной группы на отдельные звенья одна и та же кинематическая пара показывается у того и другого звена, если эти звенья входили в нее в составе структурной группы.
После этого определяется класс и порядок каждой структурной группы, затем класс и порядок механизма в целом.
Класс группы определяется наивысшим классом входящего в нее контура (звена), класс контура определяется количеством кинематических пар, в которые входит.
Порядок группы определяется количеством свободных элементов кинематических пар, которыми группа присоединяется к входному звену и стойке или к механизму и стойке.
Класс и порядок всего механизма определяется классом и порядком наиболее сложной структурной группы, механизма, то есть наивысшим классом и наивысшим порядком группы, входящей в состав механизма.
Н![]() аиболее
часто встречаются двухповодковые
группы:
аиболее
часто встречаются двухповодковые
группы:
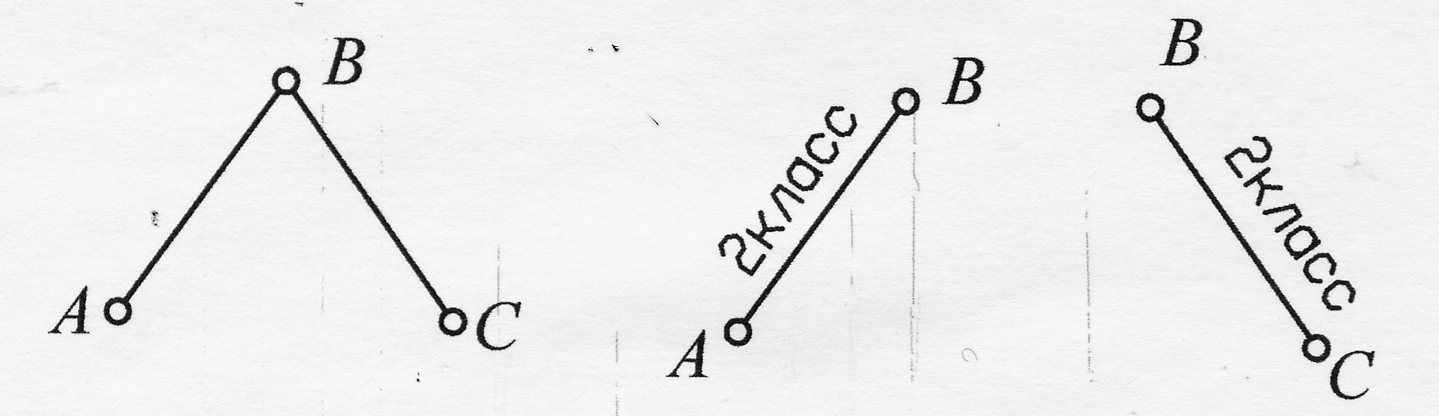
Рис. 2.
Контуры АВ и ВС – 2-го класса, так как каждый из них входит в две кинематические пары (рис. 2).
Контуры АВ и ВВХ – 2-го класса, так как каждый из них входит в две кинематические пары (рис. 3).
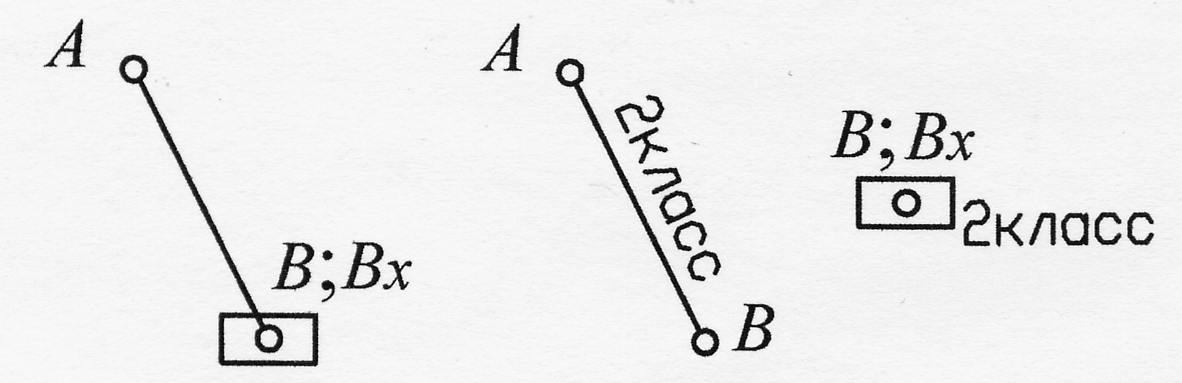
Рис. 3.
Контуры ОА/ и АА/ – 2-го класса, так как каждый из них входит в две кинематические пары (рис. 4).
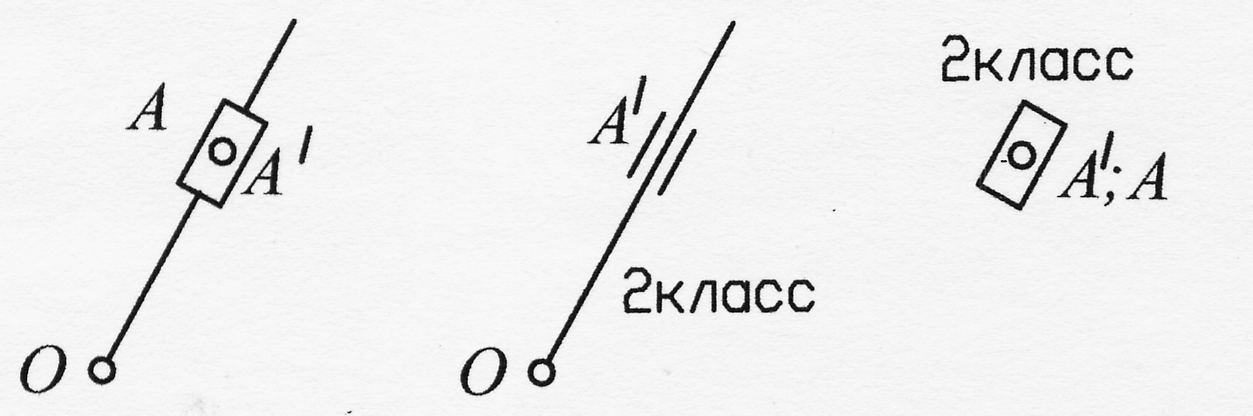
Рис. 4.
Группы (рис. 2, 3, 4) – 2-го класса второго порядка, так как каждая из них состоит из двух контуров 2-го класса и имеет по два свободных элемента кинематических пар.
Т![]() рехповодковые
группы:
рехповодковые
группы:
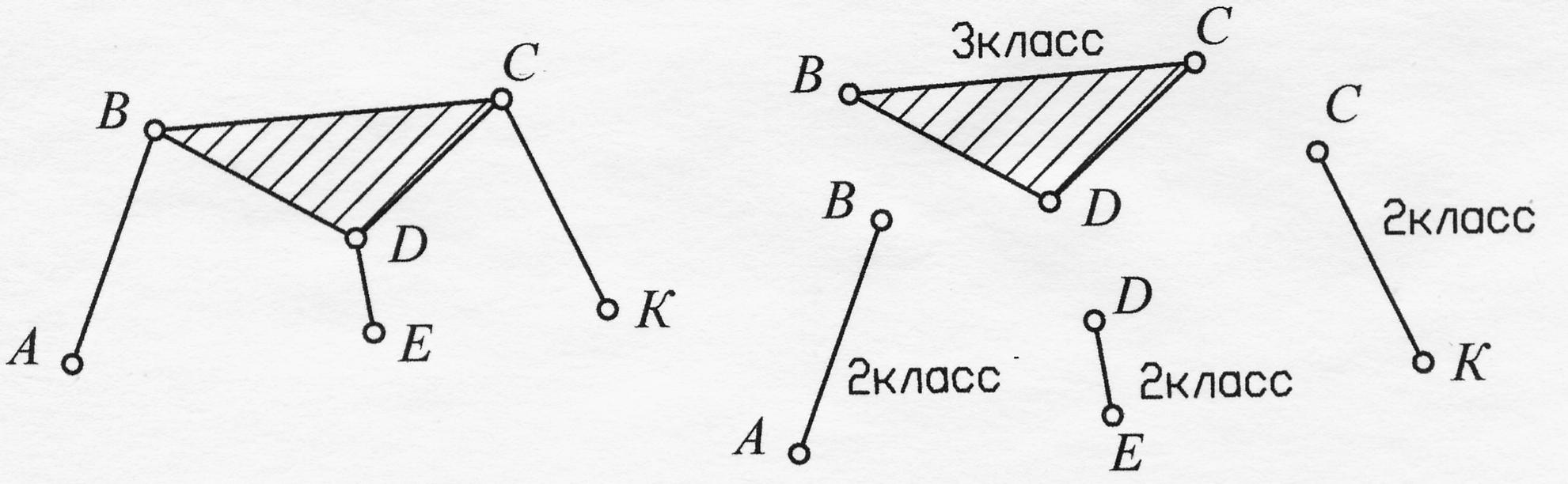
Рис. 5.
Контуры АВ, DЕ, СК – 2-го класса, так как каждый из них входит в две кинематические пары (рис. 5).
Контур ВDС – 3-го класса, так как входит в три кинематические пары.
Группа 3-го класса третьего порядка. Она состоит из трех контуров 2-го класса и одного контура 3-го класса и имеет три свободных элемента кинематических пар.
ПРИМЕРЫ ВЫПОЛНЕНИЯ
Пример 1. Произвести структурный анализ рычажного механизма качающегося конвейера (рис. 6).
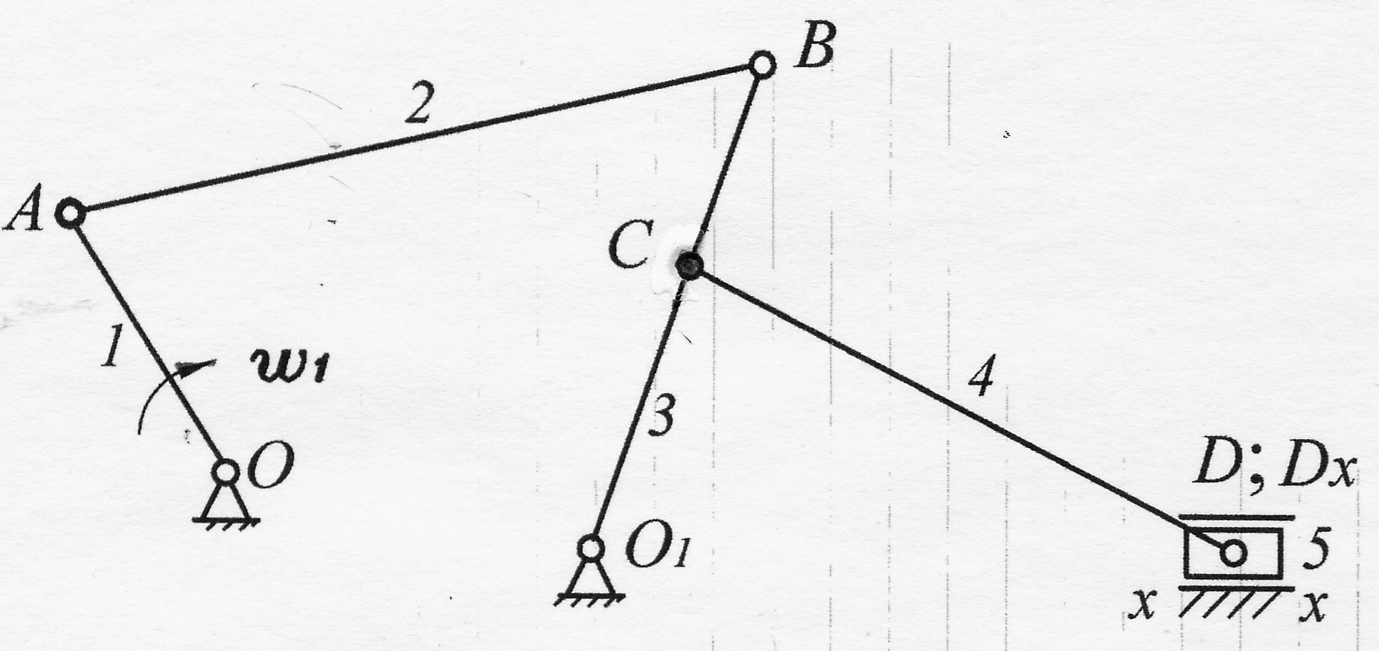
Рис. 6. Кинематическая схема: звено 1– кривошип; звено 2 – шатун;
звено 3 – коромысло; звено 4 – шатун; звено 5 – ползун.
1 .1. Определим степень подвижности механизма (рис. 6) по формуле П. Л. Чебышева.
г![]() де
де
Поэтому W= 3·5 - 2·7= 1, то есть в данном механизме одно входное звено ОА. Следовательно, обеспечивается структурное условие существования механизма.
1.2. Разобьем механизм на структурные группы.
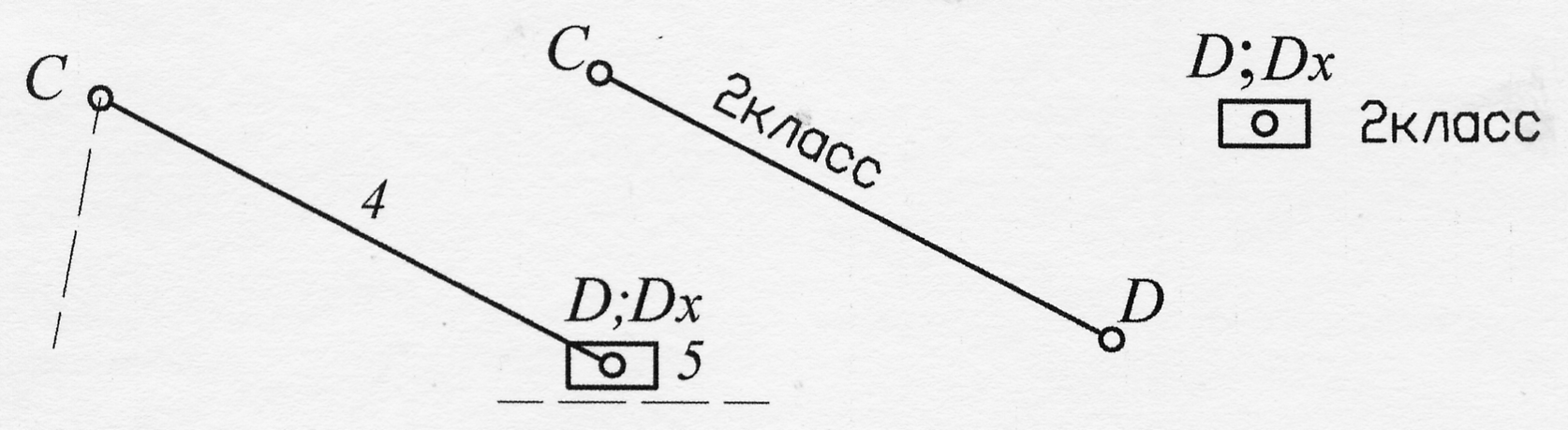
Рис. 7. Группа звеньев 4-5
n=2; p5=3; W=3·2 - 2·3=0.
Группа звеньев 4-5 – 2-го класса (рис. 7), так как контуры 4-5 имеют 2 класс.
Группа звеньев 4-5 – второго порядка, так как имеет два свободных элемента кинематических пар (свободными элементами в точке С присоединяется к другой группе, а в точке DХ ползуна присоединяется к неподвижной направляющей х–х, рис. 6).
Группа звеньев 2-3 – 2-го класса (рис. 8), так как контуры АВ и О1В имеют 2-й класс. Связь контура О1В с группой 4-5 в точке С – пассивная, поэтому эта пара не принимается во внимание (рис.6).
n=2; p5=3; W=3·2 - 2·3=0.
Р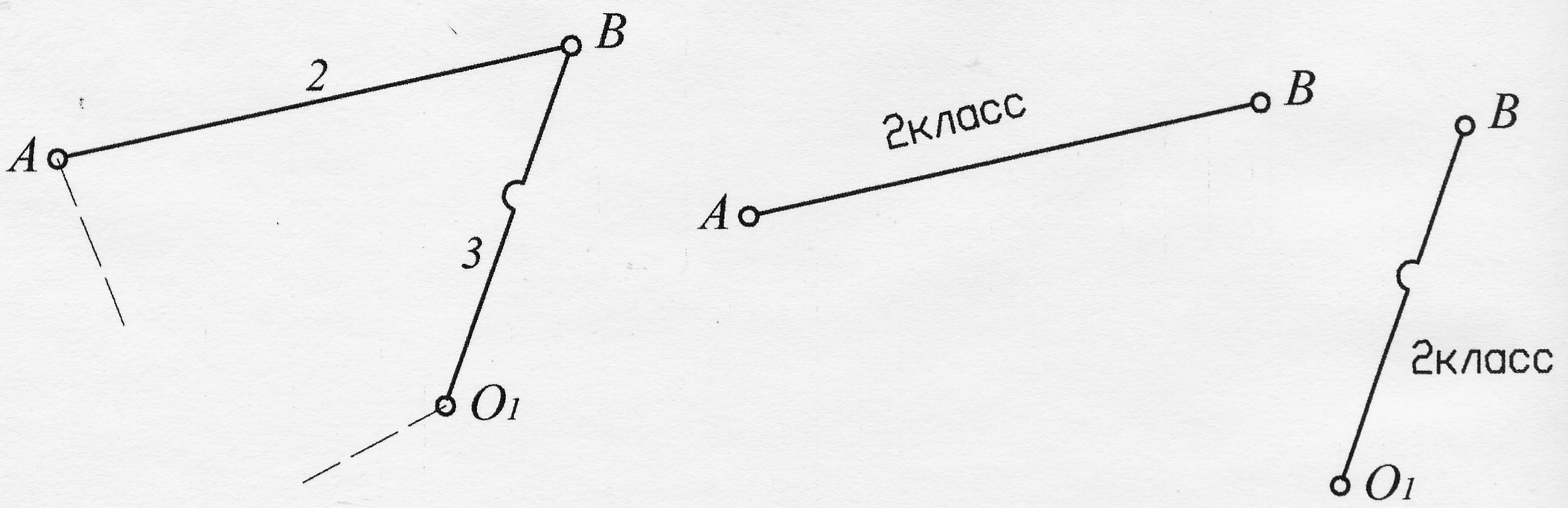 ис.
8. Группа звеньев 2-3
ис.
8. Группа звеньев 2-3
Группа звеньев 2-3 – второго порядка, так как имеет два свободных элемента кинематических пар (свободным элементом в точке А присоединяется к входному звену, а свободным элементом в точке 01 присоединяется к стойке (рис. 8).
Вывод: данный механизм имеет 2-й класс, второй порядок, так
как в его состав входят две группы 2-го класса и второго порядка.
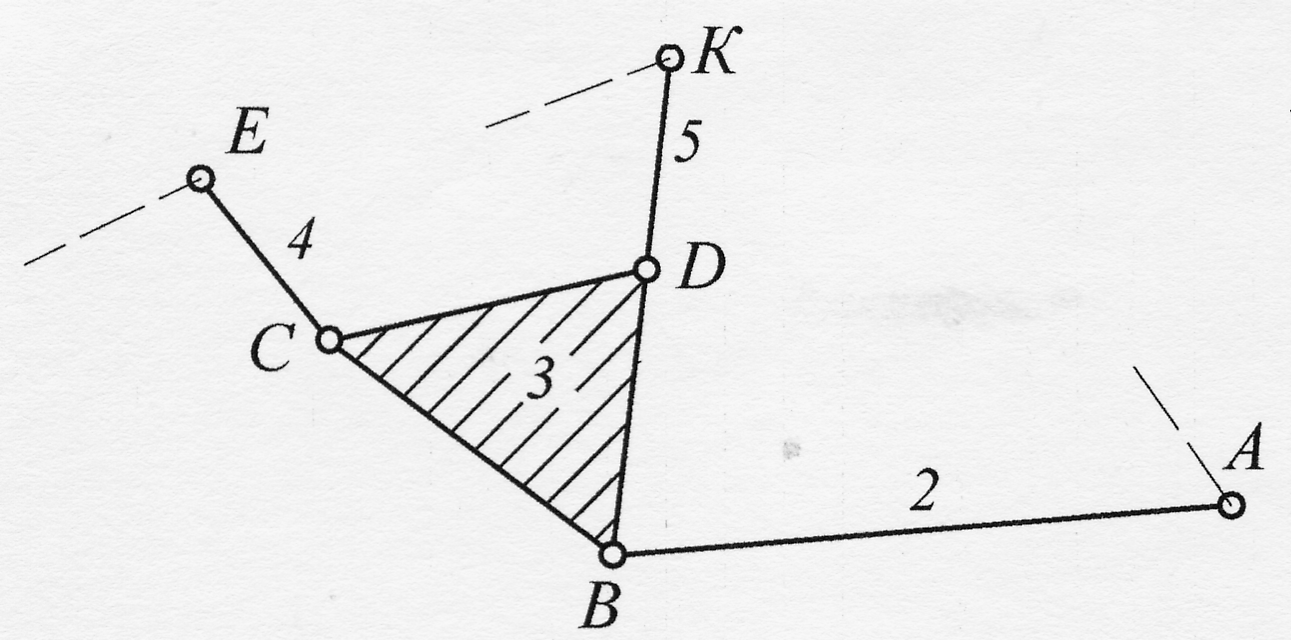
Пример 2. Произвести структурный анализ механизма (рис. 9).
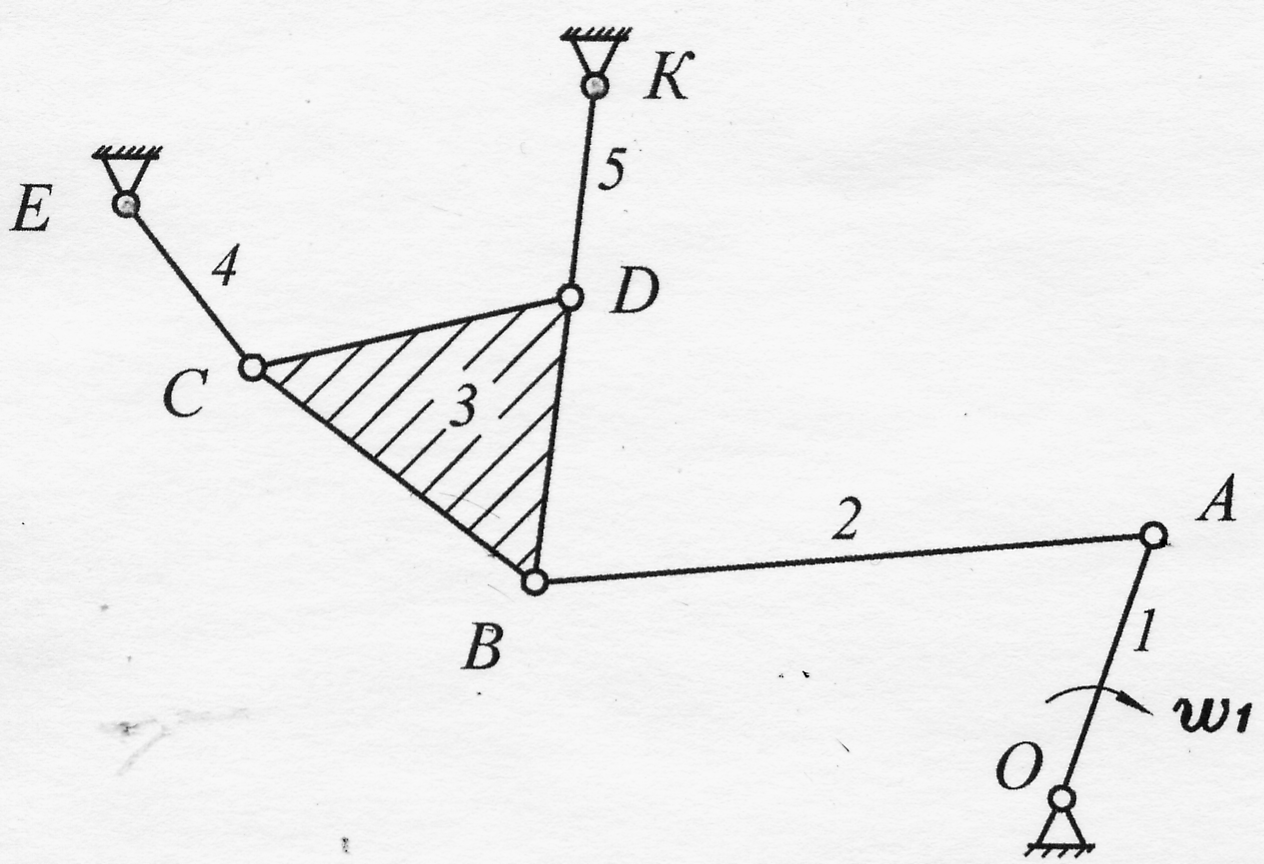
Рис. 9. Кинематическая схема: звено 1– кривошип; звено 2 – шатун;
звено 3 –шатун; звено 4 – коромысло; звено 5 – коромысло.
2.1. Определим степень подвижности механизма (рис. 9) по ф ормуле П. Л. Чебышева.
г де
Поэтому W= 3·5 - 2·7= 1, то есть в данном механизме одно входное звено ОА. Следовательно, обеспечивается структурное условие существования механизма.
2.2. Определим класс и порядок механизма.
В механизме одна структурная группа, так как на более мелкие группы механизм разбить нельзя (рис. 10, 11).
 Здесь
Здесь
n=4; p5=6; W=3·4 - 2·6=0.
Рис. 10. Группа звеньев 2-3-4-5
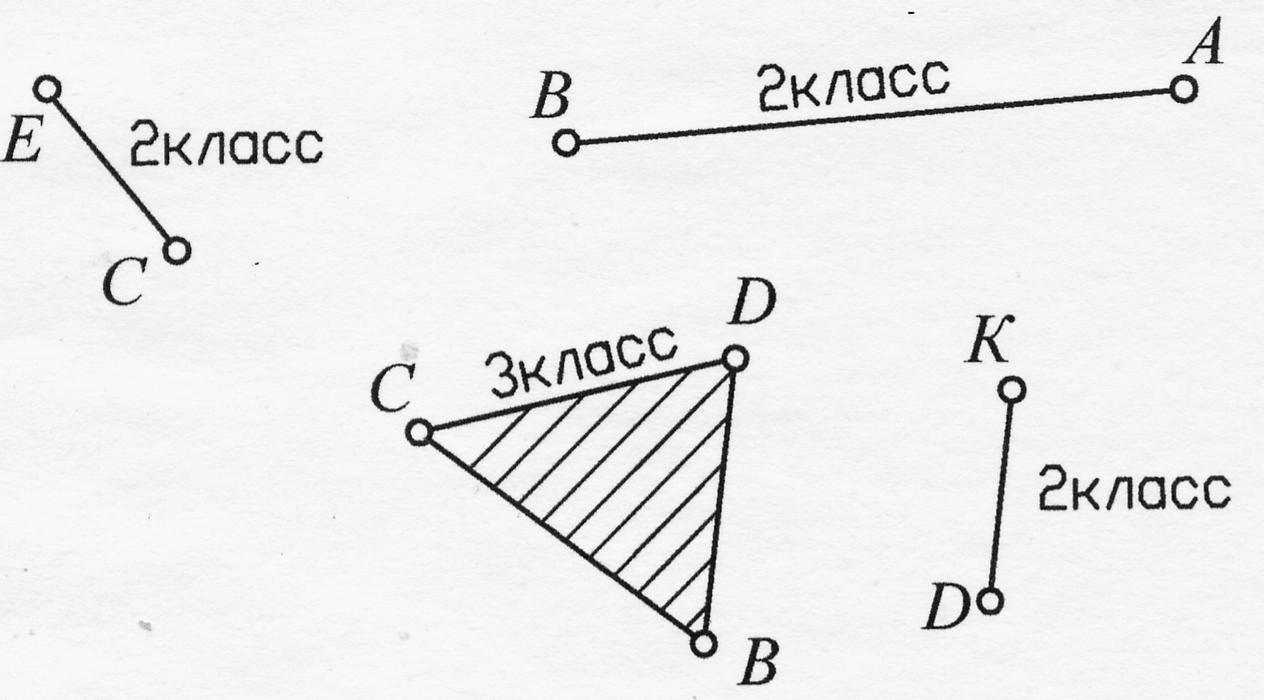
Рис. 11.
Группа звеньев 2-3-4-5 – 3-го класса, так как контуры 2,4,5 – 2-го класса; контур 3 – 3-го класса, так как образует кинематические пары со звеньями 2,4,5 (рис. 11).
Группа звеньев 2-3-4-5 – третьего порядка, так как имеет три свободных элемента кинематических пар (в точках А, Е, К) (рис. 10).
Вывод: данный механизм имеет 3-й класс и третий порядок.
так как в его состав входит одна группа 3-го класса
третьего порядка
Пример 3. Произвести структурный анализ механизма (рис. 12).
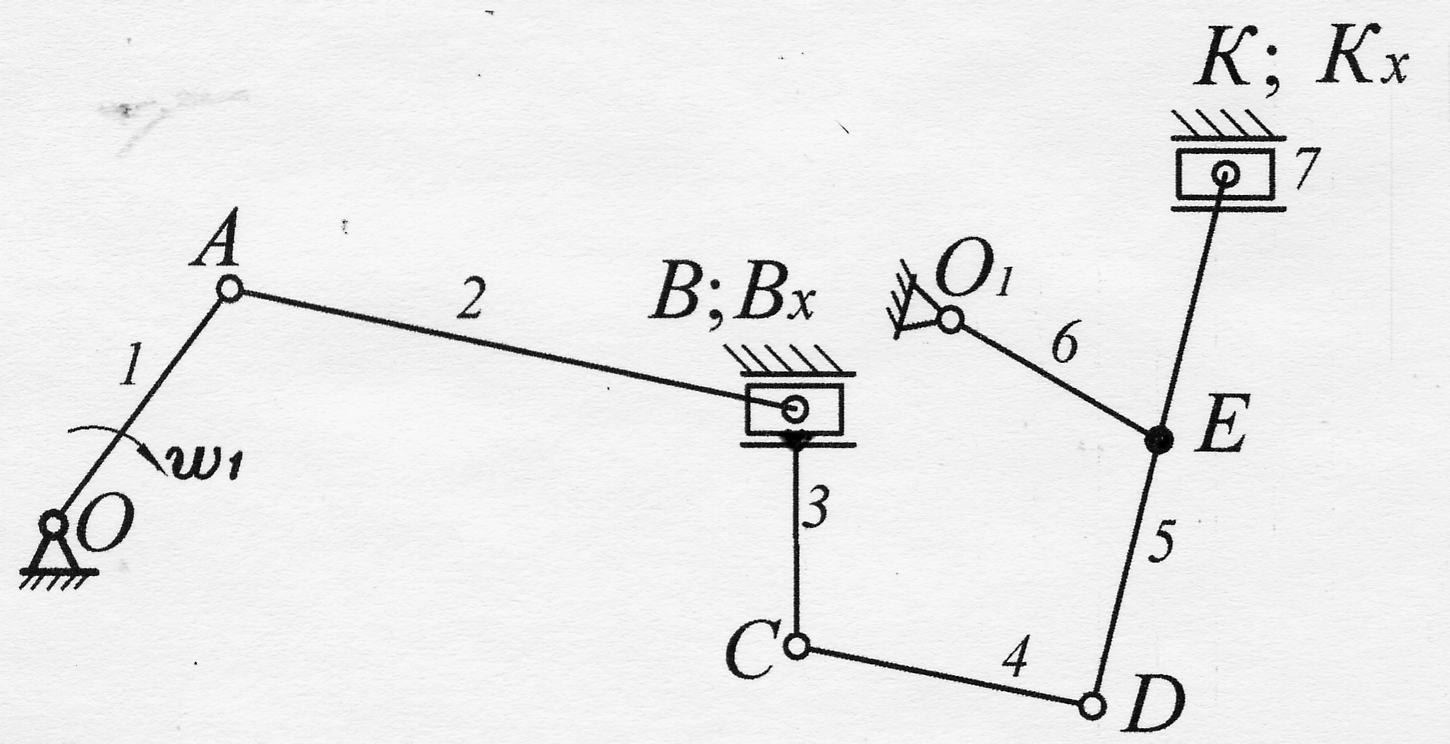
Рис.12. Кинематическая схема: звено 1– кривошип; звено 2 – шатун;
звено 3 –ползун; звено 4 – шатун; звено 5 – шатун;
звено 6 – коромысло; звено 7 – ползун.
3.1. Определим степень подвижности механизма (рис. 12) по формуле П. Л. Чебышева.
г![]() де
де
Поэтому W= 3·7 - 2·10 = 1, то есть в данном механизме одно входное звено ОА. Следовательно, обеспечивается структурное условие существования механизма.
3.2. Определим класс и порядок механизма.
Разобьем механизм на структурные группы (см. рис. 12).
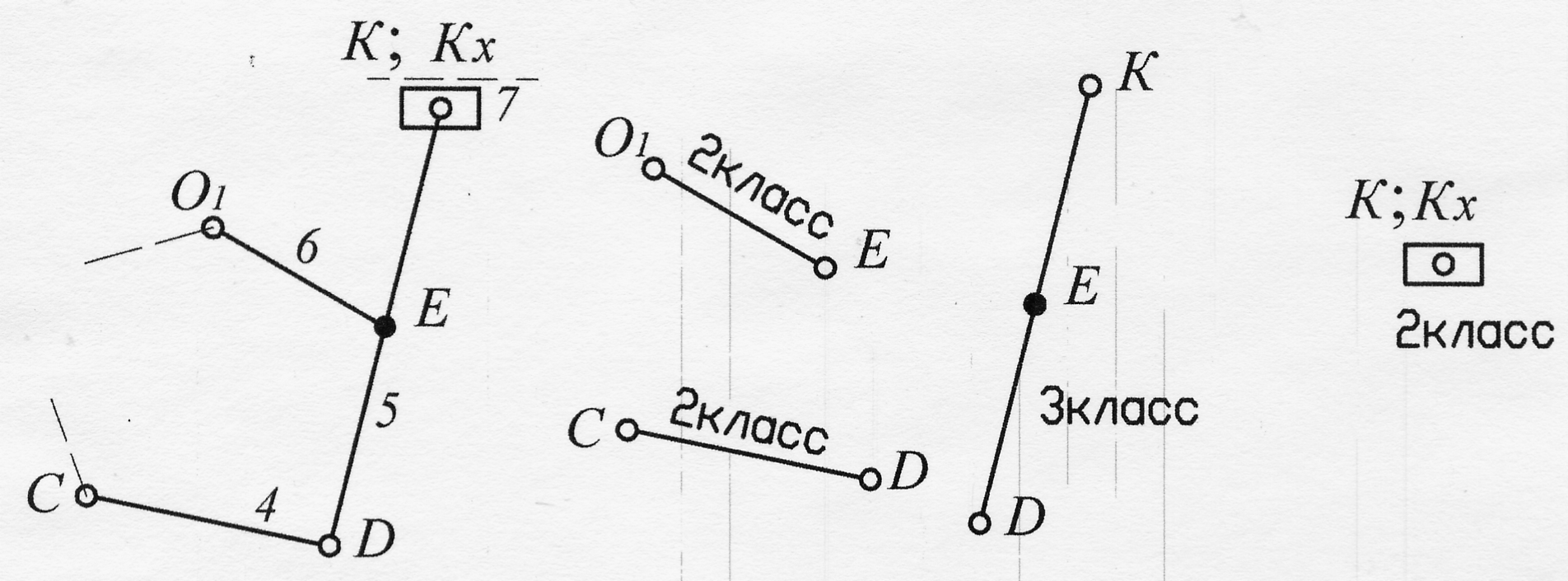
Рис. 13. Группа звеньев 4-5-6-7
Здесь n=4; p5=6; W=3·4 - 2·6=0.
Группа звеньев 4-5-6-7 – 3-го класса, так как контуры 4-6-7 – 2-го класса, контур 5 – 3-го класса (рис. 13).
Группа звеньев 4-5-6-7 третьего порядка, так как имеет три свободных элемента кинематических пар (рис. 13).
Группа звеньев 2-3 – 2-го класса, так как контуры 2-3 –2-го класса (рис. 14) (буквенные обозначения те же, что и на рис. 12).
Группа звеньев 2-3 – второго порядка, так как имеет два свободных элемента кинематических пар (рис. 14).
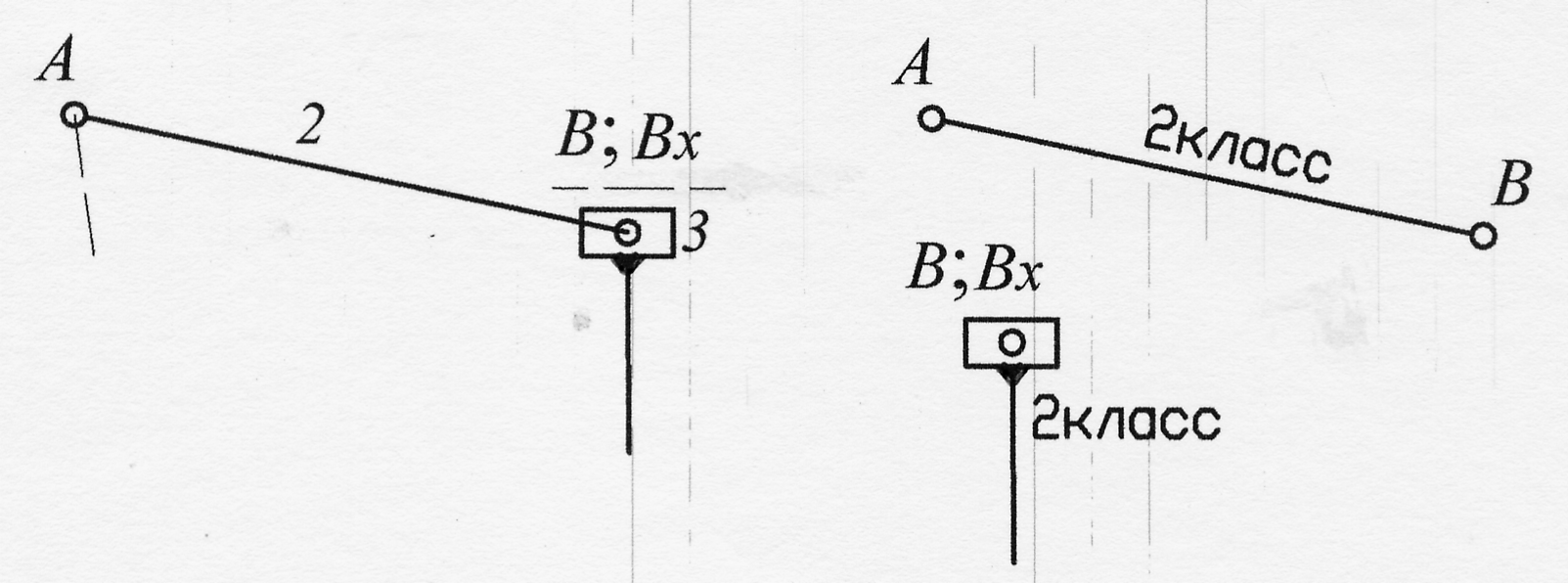
Рис. 14. Группа звеньев 2-3
Вывод: данный механизм 3-го класса третьего порядка, так как в
его состав входит одна группа 3-го класса третьего
порядка, в вторая группа – 2-го класса второго порядка.