

Геометрическое и аналитическое условие равновесия сходящейся системы сил. Теорема о трех силах.
1.Геометрическое условие равновесия. Так как равнодействующая R сходящихся сил определяется как замыкающаяся сторона силового многоугольника, построенного из этих сил, то Rможет обратиться в нуль тогда и только тогда, когда конец последней силы в многоугольнике совпадает с началом первой, т.е. когда многоугольник замкнётся. Следовательно, для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугльник, постоенный из этих сил, был замкнут. 2.Аналитические условия равновесия. Для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трёх координатных осей были равны нулю. Теорема о трёх силах. Если свободное твёрдое тело находится в равновесии под действием трёх непараллельных сил, лежащих в одной плоскости, то линии действия этих сил пересекаются в одной точке. Доказанная теорема выражает необходимое, но недостаточное условие равновесия свободного твёрдого тела под действием трёх сил.
Алгебраический момент силы относительно центра и его свойства.
Вращательный
эффект силы характеризуется ее моментом.
Моментом силы F
относительно центра О называется
величина, равная взятому с соответствующим
знаком произведению модуля силы на
длину плеча.
 .
Отметим следующие свойства момента
силы: 1.Момент силы не изменяется при
переносе точкиприложения силы вдоль
её линии действия. 2.Момент силы
относительно центра О равен нулю только
тогда, когда сила равна нулю или когда
линия действия силы проходит через
центр О (плечо равно нулю). 3. Момент силы
численно выражается удвоенной площадью
треугольника ОАВ.
.
Отметим следующие свойства момента
силы: 1.Момент силы не изменяется при
переносе точкиприложения силы вдоль
её линии действия. 2.Момент силы
относительно центра О равен нулю только
тогда, когда сила равна нулю или когда
линия действия силы проходит через
центр О (плечо равно нулю). 3. Момент силы
численно выражается удвоенной площадью
треугольника ОАВ.
Понятие о ферме, назначение, применение. Простейшая ферма. Зависимость между количеством шарниров и стержней. Основные определения и допущения.
Фермой называется жёсткая конструкция из прямолинейных стержней, соединённых на концах шарнирами. Если все стержни лежат в одной плоскости, ферма называется плоской. Места соединения стержней фермы называют узлами. При расчете фермы трением в узлах и весом стержней (по сравнению с внешними нагрузками) пренебрегают или распределяют веса стержней по узлам. Тогда на каждый из стержней фермы будут действовать две силы, приложенные к его концам, которые при равновесии могут быть направлены только вдоль стержня. Следовательно, можно считать, что стержни фермы работают только на растяжение или на сжатие.
Определения усилий в стержнях фермы методом вырезания узлов. Достоинства и недостатки метода.
Этим методом удобно пользоваться, когда надо найти усилия во всех стержнях фермы. Он сводится к последовательному рассмотрению условий равновесия сил, сходящихся в каждом
 из
узлов фермы. Ход расчётов поясним на
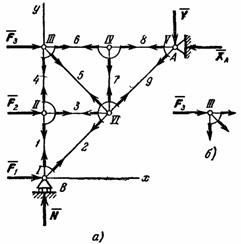
конкретном примере. Рассмотрим
изображённую на рис,83 ферму, образованную
из одинаковых равнобедренных прямоугольных
треугольников, действующих на силы
параллельны оси x
и равны : F1=F2=F3=F=2T.
В этой ферме число узлов n=6,
а число стержней k=9.
Следовательно соотношение выполняется
и ферма является жёсткой, без лишних
стержней. Составляя уравнения равновесия
для фермы в целом, найдём, что реакции
опор направлены, как показано на рисунке,
и численно равны
из
узлов фермы. Ход расчётов поясним на
конкретном примере. Рассмотрим
изображённую на рис,83 ферму, образованную
из одинаковых равнобедренных прямоугольных
треугольников, действующих на силы
параллельны оси x
и равны : F1=F2=F3=F=2T.
В этой ферме число узлов n=6,
а число стержней k=9.
Следовательно соотношение выполняется
и ферма является жёсткой, без лишних
стержней. Составляя уравнения равновесия
для фермы в целом, найдём, что реакции
опор направлены, как показано на рисунке,
и численно равны
 Переходим
к определению усилий в стержнях.
Пронумеруем узлы фермы римскими цифрами,
а стержни арабскими. Искомые усилия
будем обозначать
Переходим
к определению усилий в стержнях.
Пронумеруем узлы фермы римскими цифрами,
а стержни арабскими. Искомые усилия
будем обозначать
 (в стержне 1)…Отрежем мысленно все узлы
вместе со сходящимися в нихстержнями
от осталтьной фермы. Действие отброшенных
частей стержней заменим силами, которые
будут направлены вдоль соответствующих
стержней и численно равны искомым
усилиям
(в стержне 1)…Отрежем мысленно все узлы
вместе со сходящимися в нихстержнями
от осталтьной фермы. Действие отброшенных
частей стержней заменим силами, которые
будут направлены вдоль соответствующих
стержней и численно равны искомым
усилиям
 …
Изображаем сразу эти силы на рисунке,
напрвляя их от узлов, т.е. считая все
стержни растянутыми. Теперь для сил,
сходящихся в каждом узле, составляем
последовательно уравнения равновесия
…
Изображаем сразу эти силы на рисунке,
напрвляя их от узлов, т.е. считая все
стержни растянутыми. Теперь для сил,
сходящихся в каждом узле, составляем
последовательно уравнения равновесия
 ,
,
 .
Начинаем с узла 1, где сходятся 2 стержня,
так как из 2 уравнений равновесия можно
определить только 2 неизвестных усилия.
Составляя уравнения равновесия для
узла 1, получим
.
Начинаем с узла 1, где сходятся 2 стержня,
так как из 2 уравнений равновесия можно
определить только 2 неизвестных усилия.
Составляя уравнения равновесия для
узла 1, получим
 ,
,
 .
Отсюда находим
.
Отсюда находим
 ,
,
 Теперь ,зная S1,
переходим к узлу 2. Для него уравнения
равновесия дают S3+F2=0,
S4-S1=0,откуда
S3=-F=-2T,
S4=S1=-1T.
Определив S4,
составляем аналогичным путём уравнения
раывновесия сначала узла 33, а затем
узла 4. Из этих уравнений находим:
Теперь ,зная S1,
переходим к узлу 2. Для него уравнения
равновесия дают S3+F2=0,
S4-S1=0,откуда
S3=-F=-2T,
S4=S1=-1T.
Определив S4,
составляем аналогичным путём уравнения
раывновесия сначала узла 33, а затем
узла 4. Из этих уравнений находим:
 ,
,
 ,
,
 .
Для вычисления S9
составляем уравнени равновесия сил,
сходящихся в узле V,
проектируя их на ось By.
Получим
.
Для вычисления S9
составляем уравнени равновесия сил,
сходящихся в узле V,
проектируя их на ось By.
Получим
 ,
откуда
,
откуда
 .
Второе уравнение равновесия для узла
5 и два уравнения для узла 4 можно
составить как поверочные. Для нахождения
усилий в стержнях эти уравнения не
понадобились, так как вместо них были
использованы три уранения равновесия
всей фермы в целом при определении
.
Второе уравнение равновесия для узла
5 и два уравнения для узла 4 можно
составить как поверочные. Для нахождения
усилий в стержнях эти уравнения не
понадобились, так как вместо них были
использованы три уранения равновесия
всей фермы в целом при определении
 .
Окончательные результаты можно занести
в таблицу:
.
Окончательные результаты можно занести
в таблицу:
№ стержня……. |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
Усилие в Т…….. |
-1 |
-2,82 |
-2 |
-1 |
+1,41 |
-3 |
0 |
-3 |
-4,23 |
Как показывают знаки усилий , стержень 5 растянут, остальные сжаты, стержень 7 не нагружен (нулевой стержень). Наличие в ферме нулевых стержней обнаруживается сразу, так как если в узле, не нагруженном внешними силами, сходятся 3 стержзня, из которых 2 направлены вдоль одной прямой, то усилие в третьем стержне равно нулю.