

Завдання
Ознайомитись з конструкцією дискет.
Ознайомитись з конструкцією дисководів різних типів.
Дослідити роботу датчиків “Початок доріжки” та DC.
Зробити висновки згідно отриманих результатів.
Хід виконання роботи
Типи пристроїв для виконання роботи надаються викладачем.
Проведіть демонтаж пристороїві ознайомтесь з іх конструкцією.
На дисководі 5,25” зробіть робочу дискету, запишіть на неї будь яку інформацію і перевірте як здійснюється читання.
Витягніть дискету, перегорніть її, знову вставте удисковод і проведіть читання.
Проаналізуйте реакцію пристрою.
На дисководі 3,5” проведіть процедуру згідно пункту 2.
Введіть команду DIR:A та визначте час до появи каталогу.
Ще раз введіть команду DIR:A і знов визначте час до появи каталогу.
Витягніть дискету, вставте її знову, введіть команду DIR:A і знову визначте час до появи каталогу.
Проаналізуйте реакцію пристрою.
Зробіть висновки відносно отриманих результатів.
Контрольні запитання для самоперевірки
Для чого призначені накопичувачі на гнучких магнітних дисках (НГМД) ?
Які основні блоки входять до складу НГМД ?
Чим відрізняються ГМД 5,25 і 3,25 ?
Для чого призначений сигнал ДС?
Які датчики НГМД надають інформацію контролеру?
Що таке тунельне видалення?
Яку конструкцію має МГ?
Лабораторна робота №3
Дослідження систем позиціонування магнітних голівок накопичувачів
Мета роботи: ознайомитись з конструкцією та принципом роботи механізмів позиціонування магнітних голівок накопичувачів на жорстких магнітних дисках.
Короткі теоретичні відомості
На практиці використовується багато механізмів переміщення голівок, але усі їх можна поділити на два основних типи:
привід з кроковим двигуном;
привід з котушкою, що рухається (звукова котушка).
Привід з кроковим двигуном
Кроковий двигун – це електродвигун, ротор якого може обертатися тільки ступінчато, на суворо визначений кут.
Голівки можуть переміщуватися тільки у відповідності з поданою на кроковий двигун кількістю крокових імпульсів.
На Рис 3.1 наведений зовнішній вигляд приводу з кроковим двигуном.

Рис. 3.1 Привід з кроковим двигуном
Для перетворення обертового руху ротора крокового двигуна у лінійний рух блока голівок використовуються: металева стрічка, гвинтова, черв’ячна або зубчата передачі, як і у накопичувачів на гнучких магнітних дисках.
Привід з рухомою котушкою
На відміну від систем з кроковим двигуном, в приводах з рухомою котушкою використовується сигнал зворотнього зв’язку, щоб можна було точно визначити положення голівок відносно доріжок й скоригувати їх при необхідності.
Привід з рухомою котушкою працює за принципом електромагнетизму. Його конструкція нагадує конструкцію звичайного гучномовця.
При появі у котушці електричного струму, вона як і у гучномовці зміщується відносно жорстко закріпленого постійного магніту, рухаючи при цьому блок голівок.
На відміну від приводу з кроковим двигуном, в пристроях з рухомою котушкою немає заздалегідь фіксованих положень.
Для пошуку конкретної доріжки використовується раніше записана на диску допоміжна інформація (сервокод).
Механізми привода голівок з рухомою котушкою бувають двох типів:
лінійний;
поворотний.
Ці типи відрізняються тільки фізичним розташуванням магнітів і котушок.
Рис. 3.2 Лінійний привід з рухомою котушкою
Лінійний привід (Рис. 3.2) переміщує голівки по прямій лінії, суворо вздовж смуги радіуса диска.
Поворотнbй привід (Рис. 3.3) працює за тим самим принципом, що й лінійний, але в ньом під час руху котушки відносно постійного магніту, ричаги переміщення голівок повертаються, рухаючи голівки ближче до краю або до центру дисків.
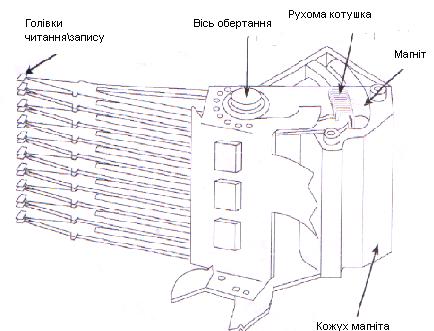
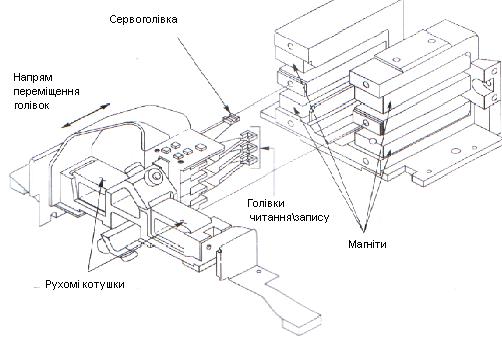
Рис. 3.3 Поворотний привід з рухомою котушкою