

22. Понятие о системах автоматического управления (сау). Функциональная схема сау.
Система параметрической стабилизации. Рассмотрим систему Г-Д предназначенную для управления электродвигателем. Uc – напряжение сети; Р – регулировочный реостат; Iв – ток возбуждения генератора; ТГ – тахогенератор; ТХ – тахометр; Rв – сопротивление ОВГ; Rp – сопротивление Р.
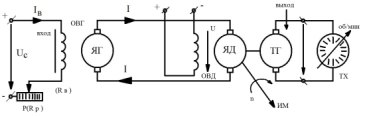
Изменяя
сопротивление реостата изменяется ток
возбуждения генератора, ЭДС генератора,
напряжение на зажимах двигателя и
изменяет частоту вращения двигателя.
Для цепи возбуждения справедлива формула
 .
Если Rp↑,
то Iв↓,
Ег↓,
U↓,
n↓.
.
Если Rp↑,
то Iв↓,
Ег↓,
U↓,
n↓.
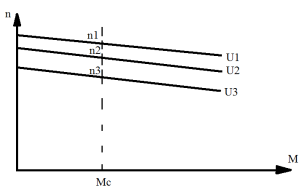
U1
> U2
> U3;
n1
> n2
> n3.
Считается, что положения движка реостата
точно обеспечивает частоту вращения
двигателя
 .
В действительности эта система подвержена
различным возмущающим воздействиям.
Они нарушают связь между Iв
токов возбуждения, это можно компенсировать
перемещением реостата, чтобы на тахометре
было показано необходимое количество
вращения.
.
В действительности эта система подвержена
различным возмущающим воздействиям.
Они нарушают связь между Iв
токов возбуждения, это можно компенсировать
перемещением реостата, чтобы на тахометре
было показано необходимое количество
вращения.
![]()
САУ называется замкнутая динамическая система обеспечивающая поддержку управления параметра постоянным или его изменение по заданной программе. При создании САУ используются два способа: по отклонению регулируемого параметра; по отклонению нагрузки.
1) Для реализации первого способа необходимо выход системы связать с входом.
![]()
![]()
Выражение
для тока возбуждения
 .
Если n↑,
то Uтг↑,
Iв↓,
Ег↓,
Uг↓,
nд↓
до начального.
.
Если n↑,
то Uтг↑,
Iв↓,
Ег↓,
Uг↓,
nд↓
до начального.
2)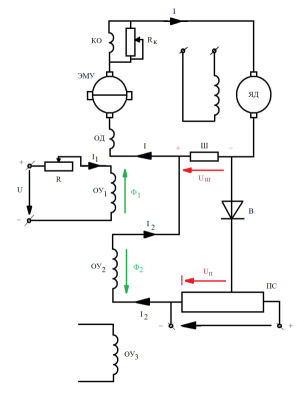
ОУ1 – командная обмотка;
ОУ2 – осуществляет обратную связь по перегрузке;
ОУ3 – стабилизационная обмотка;
Ш – шунт;
ПС – потенциометр сравнения;
В – вентиль отсечки.
Данная система позволяет получить механическую характеристику электродвигателя заданной формы. Если Uп > Uш, то I2 = 0. Если Uш > Uп, то I2 ≠ 0.
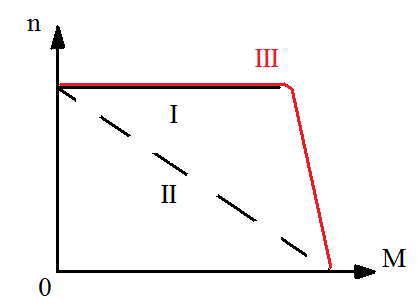
I характеристика – при работе только одной ОУ1; II характеристика – при отсутствии отсечки по току в ОУ2; III характеристика – с отсечкой по току в ОУ2. В САУ различают объект управления и технические средства обеспечения управления. В качестве технических средств могут быть использоваться трансформаторы, реле, логические элементы и т.д. Всякую САУ можно представить в виде функциональной схемы, устанавливающей связь между объектом управления и техническим оборудованием.
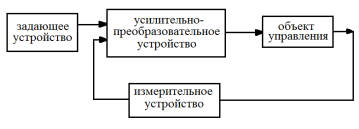
Задающее устройство – реостат; усилительно-преобразовательное устройство – генератор; объект управления – электродвигатель; измерительное устройство – тахогенератор.