

1.Структурная схема, определение и классификация электроприводов.
Электропривод и исполнительный механизм, как правило, соединяет друг с другом механические передачи. Электроэнергия поступает к электродвигателю либо от сети, либо от преобразователя. Управление электродвигателя или преобразователя осуществляется с помощью специальной аппаратуры управления АУ. Связь между перечисленными элементами можно изобразить так:

ГОСТ-ое определение электропривода: Электромеханическое устройство состоящее из электродвигателя, преобразователя, механический преобразователь, аппаратура управления предназначенное для электрификации и автоматизации рабочих процессов называется электропривод.
Классификация электроприводов по III признакам.
I По роду тока
II По назначению
III По способу управления
Классификация по способу управления.
1) Неавтоматизированный электропривод. Все операции по управлению выполняются человеком вручную.
2) Автоматизированный электропривод. Роль человека сводиться к подаче первоначальной операции, далее все операции выполняются аппаратами.
3) Автоматический электропривод. Работает без непосредственного участия человека. Например: автопилот, авторулевой, автомашинист.
2. Принципиальная схема и механические характеристики электродвигателя постоянного тока с параллельным возбуждением.



 - частота вращения идеального холостого
хода.
- частота вращения идеального холостого
хода.

Rp2 > Rp1; Uн = const; Фн = const.
Вывод: все механические характеристики являются прямыми линиями, они пересекаются в одной точке n0. Естественная характеристика является жесткой, т.е. с изменением момента частота вращения изменяется не значительно.
Пример: приводной электродвигатель вентиляторов, насосов, компрессоров.

I
= Ia
= Iв;
 С1
и С2
– константы, Rпв
– сопротивление последовательной
обмотки возбуждения. Вид механических
характеристик – гиперболы. Двигатель
в режиме холостого хода не может.
Обязательно должен быть связан с
исполнительным механизмом. Развивает
значительный момент вращения при
потребления тока в небольших количествах.
Широко применяется в небольших
количествах.
С1
и С2
– константы, Rпв
– сопротивление последовательной
обмотки возбуждения. Вид механических
характеристик – гиперболы. Двигатель
в режиме холостого хода не может.
Обязательно должен быть связан с
исполнительным механизмом. Развивает
значительный момент вращения при
потребления тока в небольших количествах.
Широко применяется в небольших
количествах.
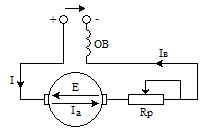
3.Управление электродвигателем постоянного тока по системе генератор-двигатель. Механические характеристики электродвигателя.
Особенности системы – якоря генератора и двигателя электрически связаны между собой.


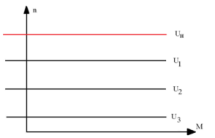 Uн
> U1
> U2
> U3
Uн
> U1
> U2
> U3
Преимущество: 1) плавный пуск электродвигателя; 2) возможность широко и плавно регулировать частоту вращения электродвигателя в широком диапазоне; 3) возможность осуществления реверса с помощью потенциометра путем плавного изменения нагрузки тока возбуждения генератора и значит ЭДС.
4. Механические характеристики асинхронного двигателя с короткозамкнутым ротором. Использование формулы Клосса для расчета механических характеристик.
Односкоростные АД с короткозамкнутым ротором


![]()
Двухскоростные АД с короткозамкнутым ротором

 – формула
Клосса. Из каталога
– формула
Клосса. Из каталога

 -
(+) двигательный режим, (-) генераторный
режим.
-
(+) двигательный режим, (-) генераторный
режим.
M(S) → n = n1(1-S) → n(M)
5. Механические характеристики асинхронного двигателя с фазным ротором при отсутствии и наличии добавочного сопротивления в цепи ротора.

Достоинства: с помощью реостата можно регулировать величину пускового момента, частоту вращения вала двигателя.
Недостатки: наличие контактных колец и щеток.
6. Механические характеристики исполнительных механизмов. Определение мощности электродвигателя в установившемся режиме по механическим характеристикам ЭД и ИМ.
В результате наличия механической передачи отдельные элементы электропривода и исполнительного механизма вращения с различной частотой вращения. Механической характеристикой ИМ называется зависимость частоты вращения вала электродвигателя от приведенного к нему статического момента сопротивления.
М = М0+М2 = Мс – статический момент сопротивления
n = F1(Mc) – механическая характеристика ИМ.
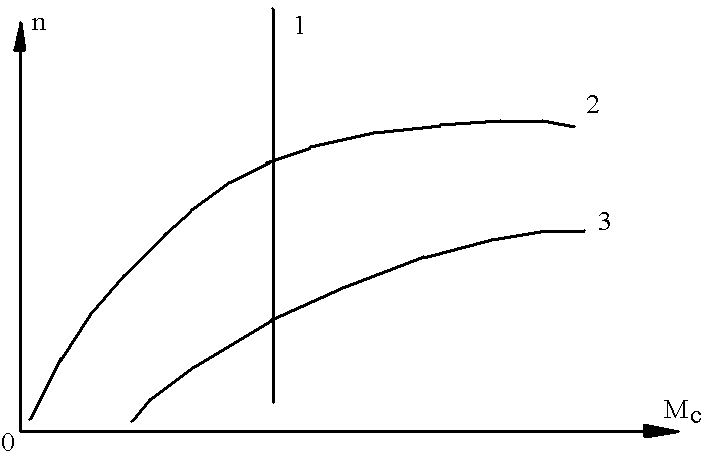
1 – грузоподъемные устройства, 2 – вентиляторы и насосы, 3 – преобразователи.
Если на одном графике в одном масштабе нанести характеристики ЭД и ИМ – точка пересечения определит требуемую мощность.

Рн = (МнUн)/9550 (кВт); [M] =Н м; [n] = об/мин.
7. Приведение моментов сопротивления к валу приводного электродвигателя.
Приведение моментов к оси вращения двигателей производиться на основании энергобаланса системы.
![]()
Pn – потери в передаче (ηn); Pдηn = Рм; М Ω = Мсм Ωм 1/ηn. Где Ω и Ωсм – угловая скорость вращения ЭД и ИМ. Мс = Мсм/ipηn; ip = Ω/Ωм – передаточное отношение редуктора.
Если механическая передача имеет k-звеньев, у которых ip1 ip2 ip3… ipk, и соответственно ηn1 ηn2 ηn3… ηnk, то результирующая формула равна:

23. Основные правила техники безопасности при работе с электрооборудованием.
1. Осмотр и ремонт проводить при снятом напряжении, при это вывесить табличку «Не включать, работают люди!».
2. Запрещается ввод действия при неисправности одного из видов защиты, а также при сопротивлении изоляции ниже допускаемого предела, при неисправной изоляции, при вибрации.
3. Запрещается хранить на кабельных трассах внутри комплексных подстанций предметы.
4. Планово-предупредительный ремонт (ППР) и планово-предупредительный осмотр (ППО)
8. Приведение моментов инерции к валу приводного электродвигателя.
Приведение моментов инерции вращательных частей основано на том, что суммарный запас кинематической энергии системы должен быть равен сумме кинематических энергий запасенных во всех вращающихся частях машинного устройства.
Iд – момент инерции ЭД; Iм – момент инерции ИМ. I1, I2…Ik; Ω1, Ω2…Ωk.

