§ 27. Рычажные механизмы
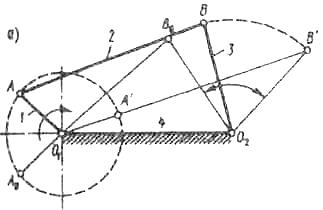
Основным типом плоского рычажного механизма является шарнирный четырехзвенник, принципиальная схема которого изображена на рис. 134, а. В этом механизме четыре вращательные кинематические пары и четыре звена: 1 – кривошип, 2 – шатун, 3 – коромысло, 4 – стойка. Такой механизм называется кривошипно-коромысловым и является однокривошипным; крайние положения звеньев показаны на рис. 134.
Кривошипно-коромысловый механизм встречается в металлорежущих станках, прессах, ковочных, полиграфических, сельскохозяйственных и других машинах, а также во многих приборах.
Если стойка шарнирного четырехзвенника самое короткое звено или если звенья 1 и 3 равной длины, то механизм становится двухкривошипным, так как звено 3 так же, как и кривошип 1, получит возможность совершать полный оборот.
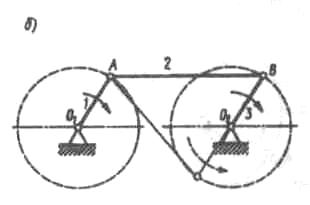
На рис. 134, б показана схема двухкривошипного механизма, который называется шарнирным параллелограммом; у такого механизма оба кривошипа вращаются в одном направлении с одинаковой угловой скоростью, а шатун 2 движется поступательно.
|
Шарнирный параллело-грамм применяется, напри-мер, в локомотивах в качестве спарника, пере-дающего вращение ведо-мым колесам, или в меха-низмах чертежных прибо-ров. На рис. 134, б тонкими линиями показан шарнир-ный антипараллелограмм, кривошипы которого враща-ются в противоположных направлениях. Если в шарнирном четырехзвеннике преобразо-вать одну вращательную пару в поступательную, то получится широко распро-страненный кривошипно-ползунный механизм (рис. 135, а). Этот механизм |
а |
|
|
|
б
Рис. 134 |
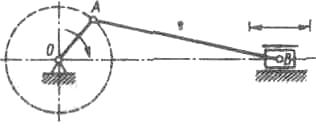
служит для преобразования вращательного движения в возвратно-поступательное (например, в компрессорах, поршневых насосах, эксцентриковых и кривошипных прессах) или, наоборот, для преобразования возвратно-поступательного движения во вращательное (например, в паровых машинах, двигателях внутреннего сгорания).
Кривошипно-ползунный механизм состоит из четырех звеньев; кривошипа ОА, шатуна АВ, ползуна В, станины и четырех кинематических пар: вращательной пары станина–кривошип, вращательной пары кривошип–шатун, вращательной пары шатун–ползун и поступательной пары ползун–станина. В кривошипно-ползунном механизме ведущим звеном является либо кривошип, либо ползун.
Такой механизм является центральным, так как ось ползуна пересекает ось кривошипа. Если ось ползуна смещена от оси кривошипа на величину эксцентриситета е (рис. 135, б), то кривошипно-ползунный механизм называется нецентральным. На этом рисунке показаны тонкими линиями крайние положения звеньев
механизма и видно, что угол поворота кривошипа при прямом (обычно рабочем) ходе больше, чем при обратном (обычно холостом) ходе. Следова-тельно, в нецентральном механизме холостой ход совершается с большей скоростью, чем рабочий. За счет эксцентриситета угол давления шатуна на ползун (а следовательно, и давление ползуна на направляющие) во время рабочего хода будет меньше, чем при холостом. Это благоприятно сказыва- |
|
а |
|
|
|
б
Рис. 135 |
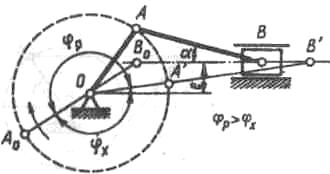
ется на КПД и долговечности машины, так как обычно нагрузка на механизм при рабочем ходе значительно больше, чем при холостом.
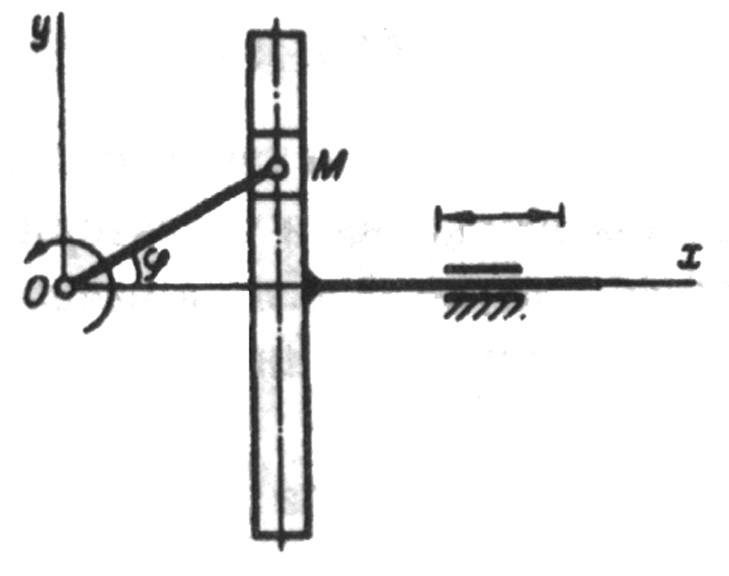
На рис. 136 показана схема четырехзвенного кривошипно-кулисного механизма с поступательно движущейся кулисой. Этот механизм преобразует вращательное движение кривошипа ОМ в возвратно-поступательное движение кулисы с помощью камня кулисы М, шарнирно соединенного с пальцем кривошипа.
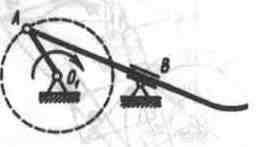
На рис. 137 представлена схема кулисного кривошипно-коромыслового механизма с качающимся ползуном. Такой механизм применяется, например, в снегоуборочных машинах.
Рис. 136 |
Рис. 137 |