

Ход работы
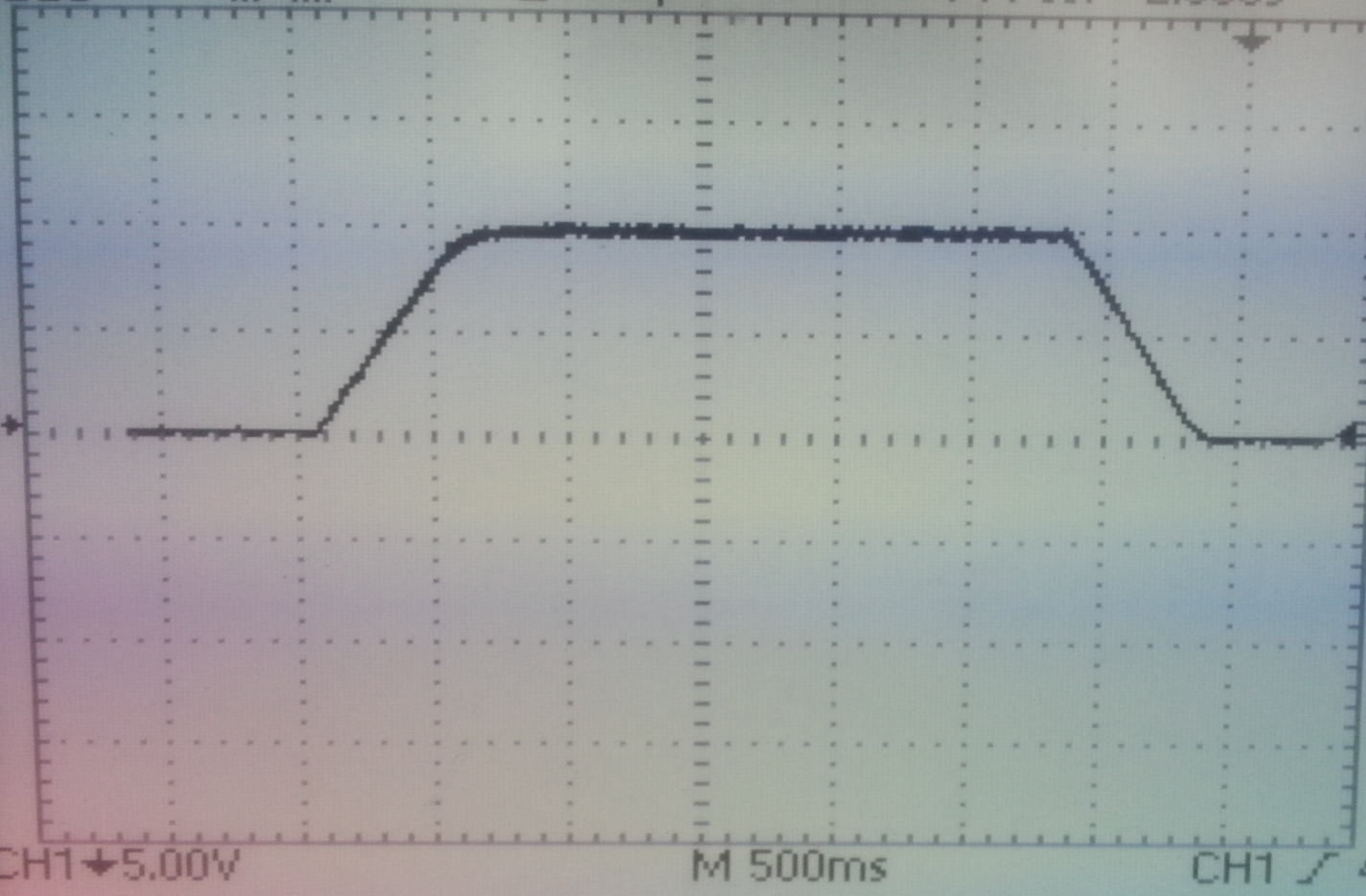
Рис 1. Осциллограмма переходного процесса при пуске и торможении двигателя
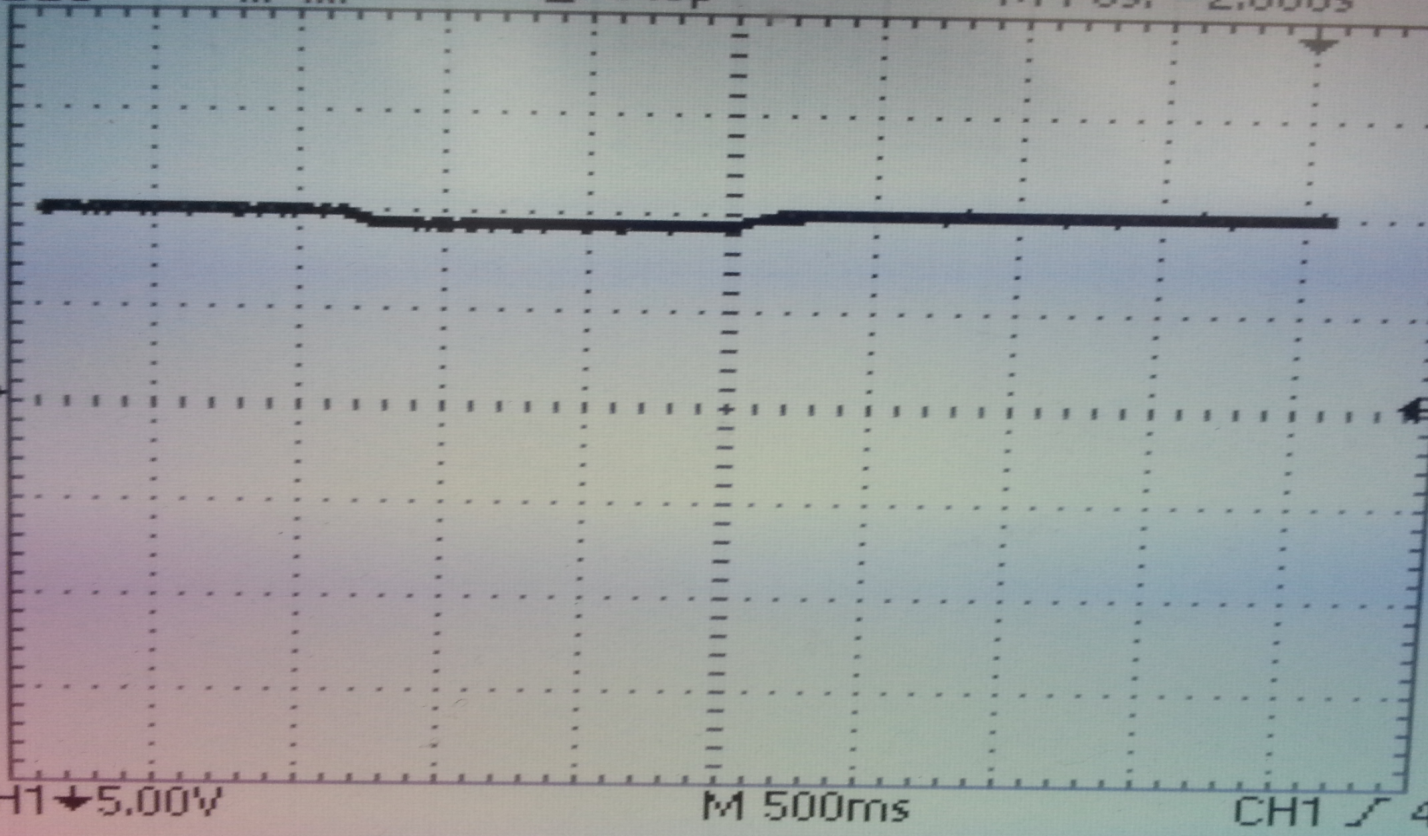
Рис 2. Осциллограмма переходного процесса при наброске и сбросе нагрузки
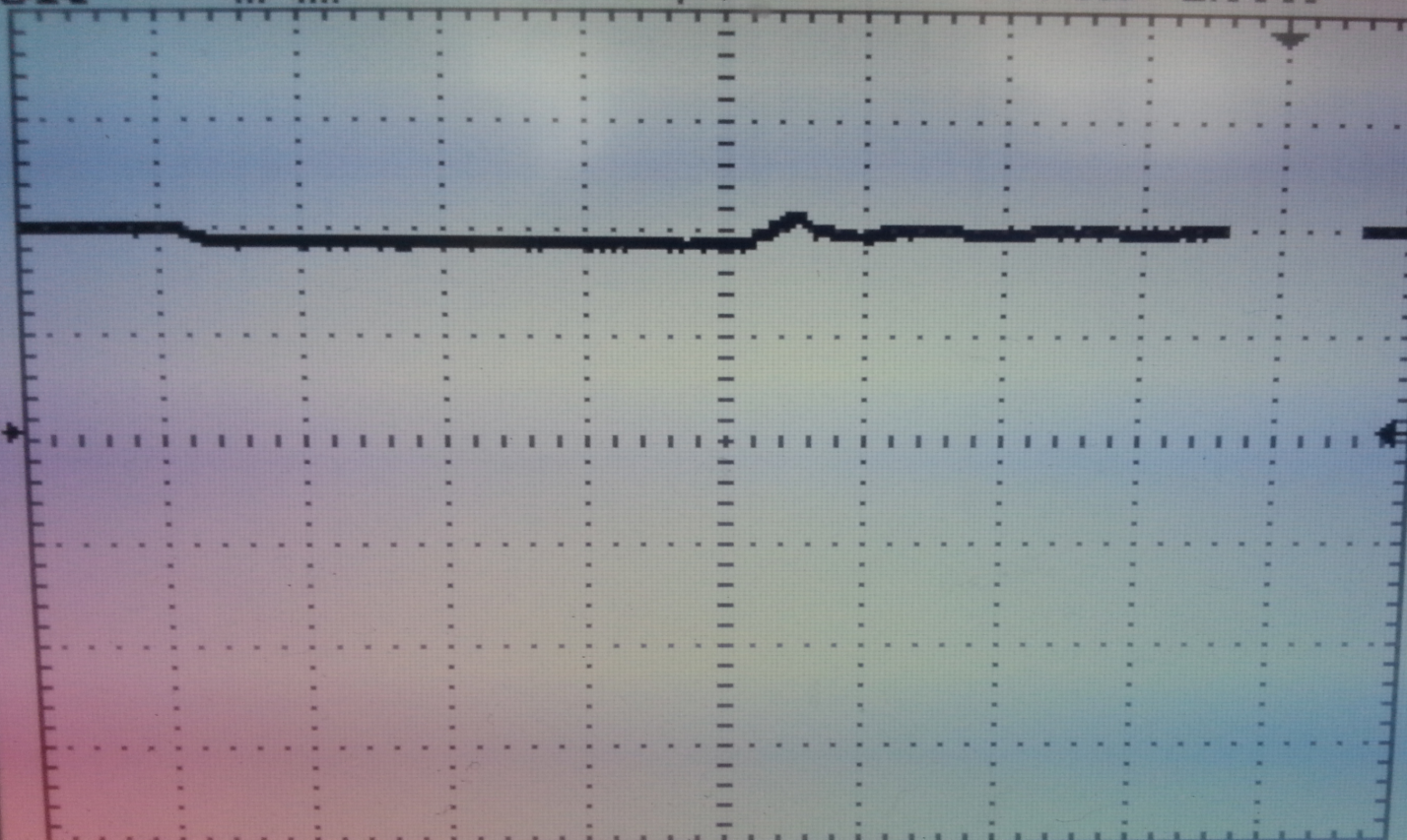
Рис 3. Осциллограмма без сигнала адаптации
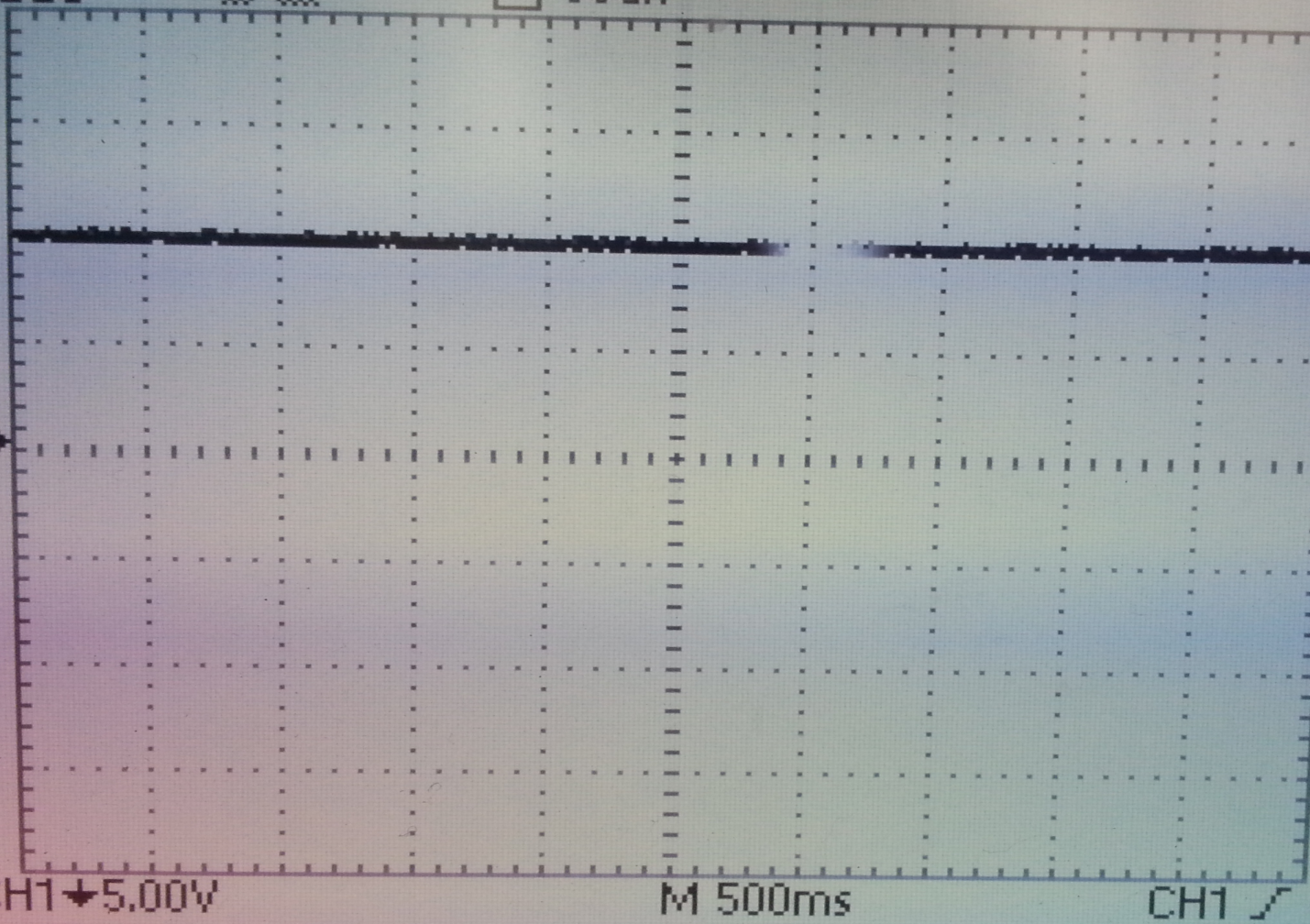
Рис 4. Осциллограмма с установленным сигналом адаптации
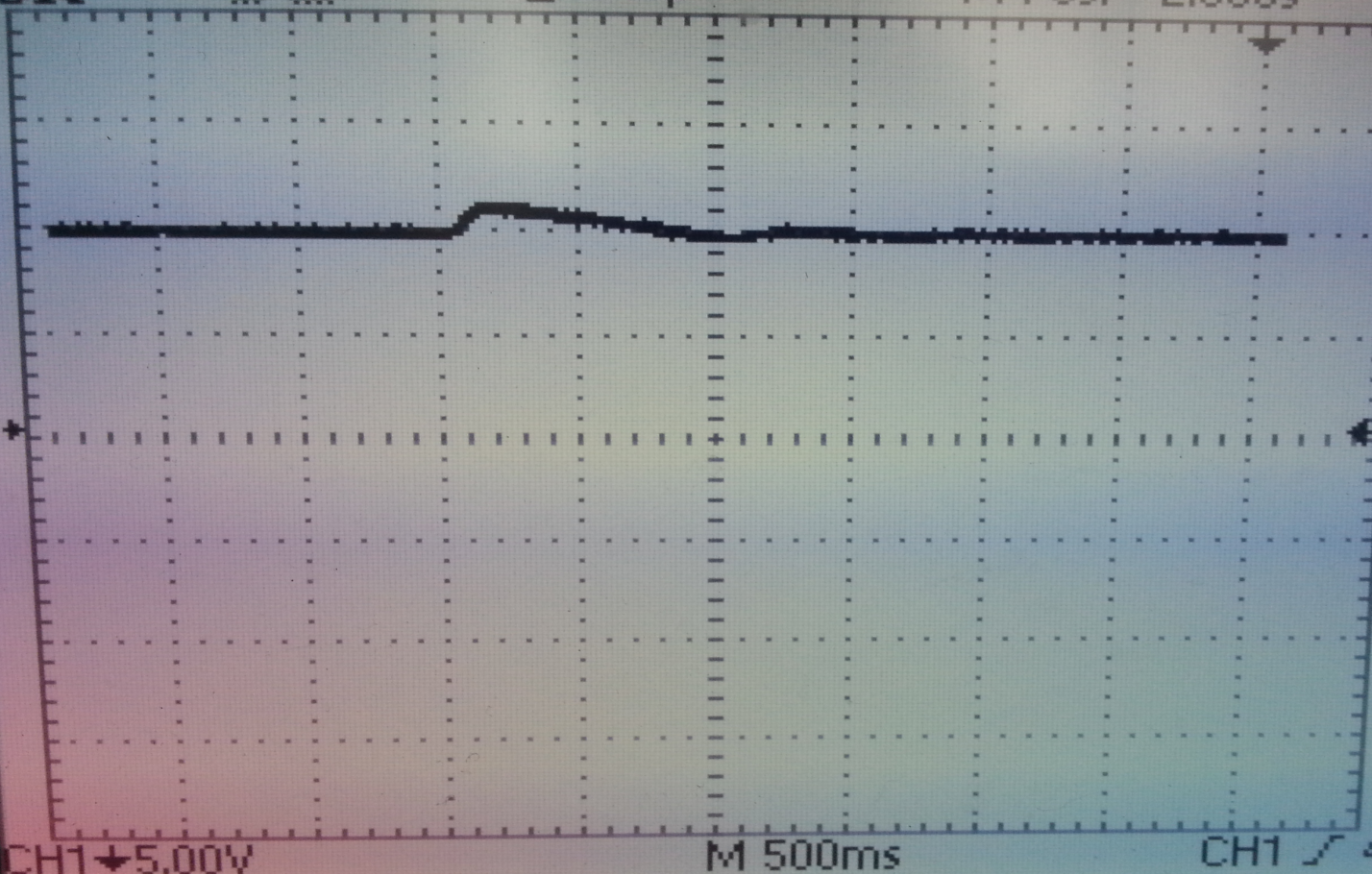
Рис 4. Осциллограмма с максимальным сигналом адаптации
Рис
5. Осциллограмма переходного процесса
при пуске двигателя при

Рис
6. Осциллограмма переходного процесса
при пуске двигателя при

Лабораторная работа 25.5
«Исследование системы электромашинный усилитель – двигатель»
Цель работы: Целью работы является исследование статических и динамических режимов в системе ЭМУ—Д предназначенной для регулирования скорости двигателя и поддержания постоянства скорости при изменении нагрузки.
Общие сведения о лабораторной установке
Принципиальная схема лабораторного стенда приведена на рис.1. Все основные соединения, показанные на схеме, а также приборы и аппараты смонтированы на стенде. Не подсоединены только обмотки управления ЭМУ и некоторые узлы схемы, которые подсоединяются студентами.
Лабораторная установка имеет асинхронный двигатель MI, двигатель постоянного тока М2 и электромашинный усилитель поперечного поля с четырьмя обмотками управления, две из которых используются для введения обратных связей по скорости и напряжению, а третья служит в качестве задающей обмотки. Нагрузка на валу двигателя М2 осуществляется нагрузочным генератором НГ. Ток нагрузки регулируется с помощью резистора R7.
С валом двигателя М2 соединен тахогенератор ТГ, используемый для введения обратной связи по скорости. Коэффициент обратной связи регулируется переключением отпаек резистора R5 с помощью тумблера B4.
Основные данные электрических мамин Двигатель М2
Рн = 0,3 кВт, UH= 220 В, I н = 2,06 А, nн = 1500 об/мин Rяд = 24,5 Ом
Eн/ωн= 0,946 В/об/мин
Электромашинный усилитель ЭМУ-50
Рн = 4,5 кВт, UH= 230 В, IН = 19,6 А, nн = 2935 об/мин, Rя= 0,475 Ом Rко = 0,385 Ом,
Rдn = 0,11 Ом .
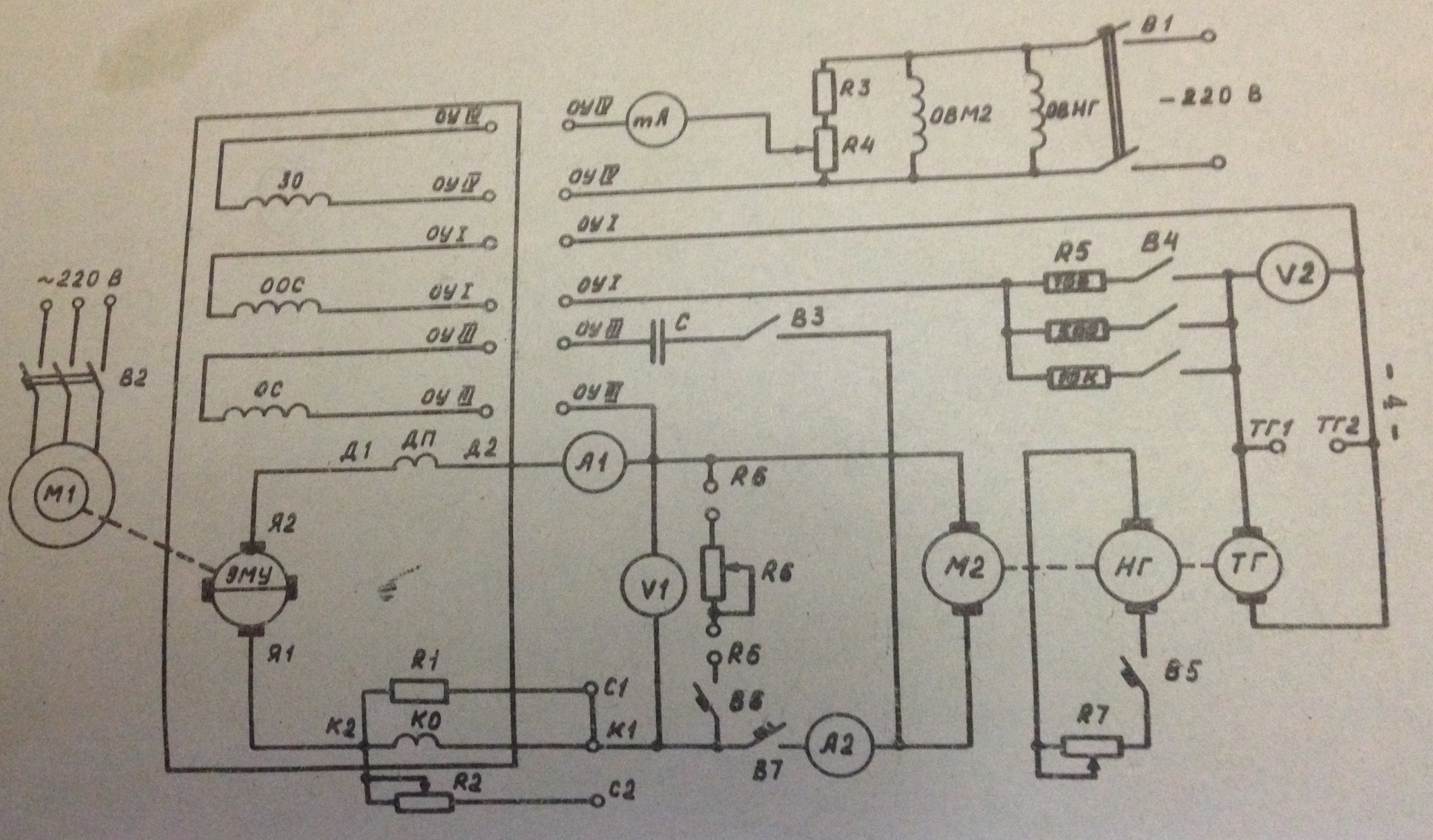
Рис.1. Принципиальная схема лабораторного стенда
Таблица 2.1
|
Ток управления |
||||
Обмотка управления |
Число витков |
Сопротивление |
Номинальный |
Длительно допустимый |
|
|
|
Ом |
мА |
мА |
|
ОУ I ОУ II ОУ III ОУ IV |
1600 110 1600 600 |
2000 10.4 2000 920 |
9 123 9 24 |
62.5 900 62.5 165 |
|
Тахогенератор ТМГ-3ОП
UH = 230 В, nн = 4000 об/мин, RЯТГ = 400 Ом, IЯ = 80 мА
В качестве задающей обмотки ЭМУ используется обмотка ОУ IУ, включенная через потенциометр R 3, R4.
В качестве стабилизирующей обмотки используется обмотка ОУ III включенная через конденсатор С ( 50 мкФ )
Анализ динамики в системе ЭМУ – Д
Анализ динамики системы проводится при следующих допущениях:
характеристики машин линейны;
индуктивность якоркой цени двигатели paвна нулю;
реакции якоря ЭМУ полностью скомпенсирована;
внутренние обратные связи в ЭМУ не учитываются.
На входе разомкнутой системы ЭМУ – Д действует напряжение задающей обмотки ЭМУ UЗ0(p) выходом является скорость двигатели ω(р). Передаточная функции звеньев этой системы приведены в литературе [I] м [II]. С учетом принятых допущений, можно получать уравнение разомкнутой системы.

или после подстановка числовых значений

где Т1 = 0,06с – электромагнитная постоянная временя первого каскада ЭМУ;
Т2 = 0,16с – электромагнитная постоянная времени короткозамкнутого контура ЭМУ (см. [I] стр.221);
Тм = 0,079с – электромеханическая постоянная времени двигателя;
kЭ = 13,8 – коэффициент усиления ЭМУ по напряжению для задающей обмотки;
kД = 1,035 l/Bc – коэффициент передачи двигателя;
kЭ kД = 14.3 1/Вс – коэффициент передачи системы по задающей обмотке ЭМУ;
R0 = 25,4 Ом – сопротивление якорной цепи ЭМУ-двигатель.
Переходной процесс разгона двигателя в разомкнутой системе при подаче ступенчатого задающего воздействия UЗ0, рассчитанный на основании теоремы разложения для уравнения (I) [4], приведен на рис.2 (кривая I).
В замкнутой системе на вход ЭМУ кроме задающего сигнала действует сигнал обратной связи по скорости двигателя (см. структурную схему рис.3) и уравнение системы принимает вид

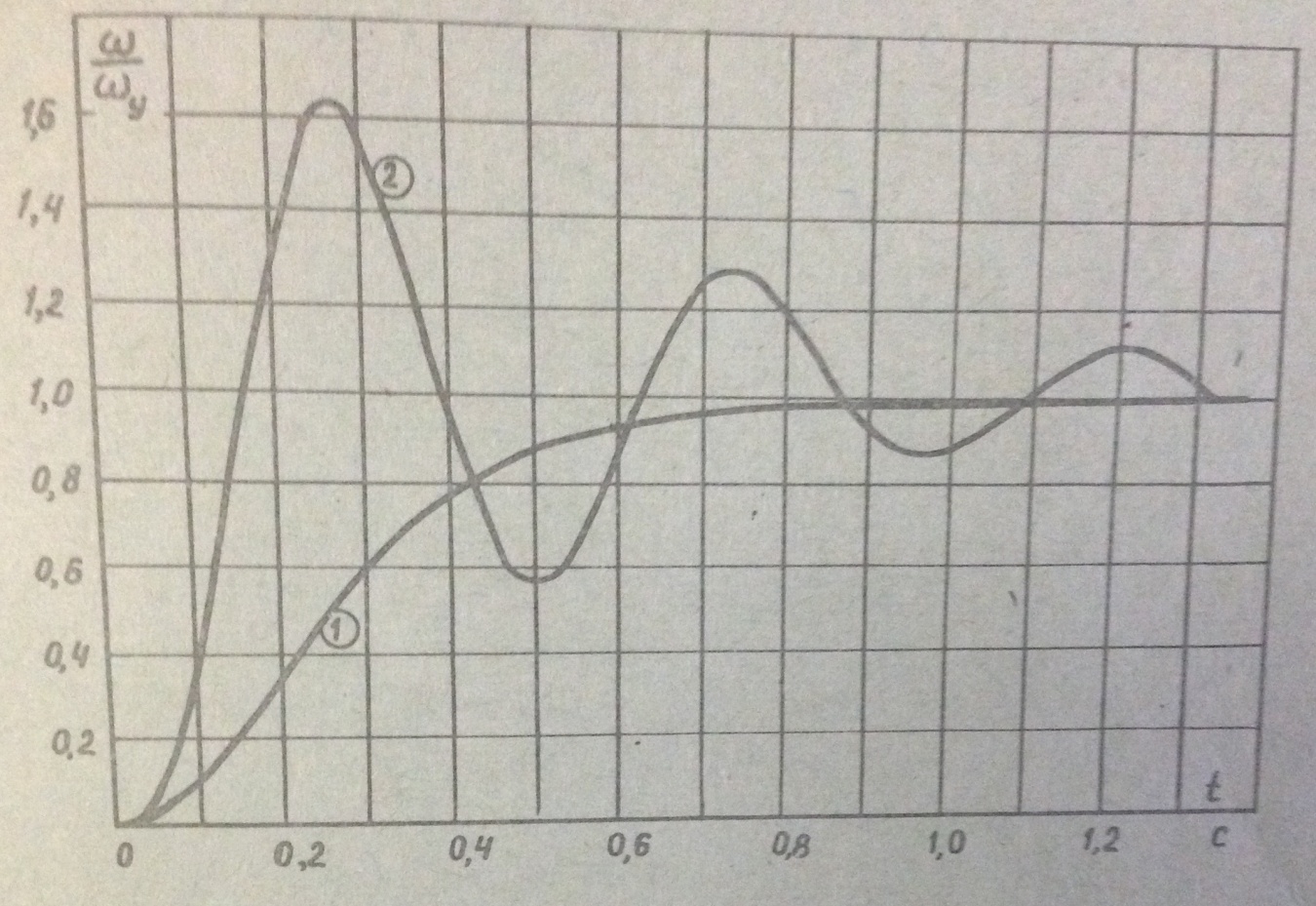
Рис.2. Расчетные кривые пуска двигателя в разомкнутой (1) и замкнутой (2) системе ЭМУ – Д
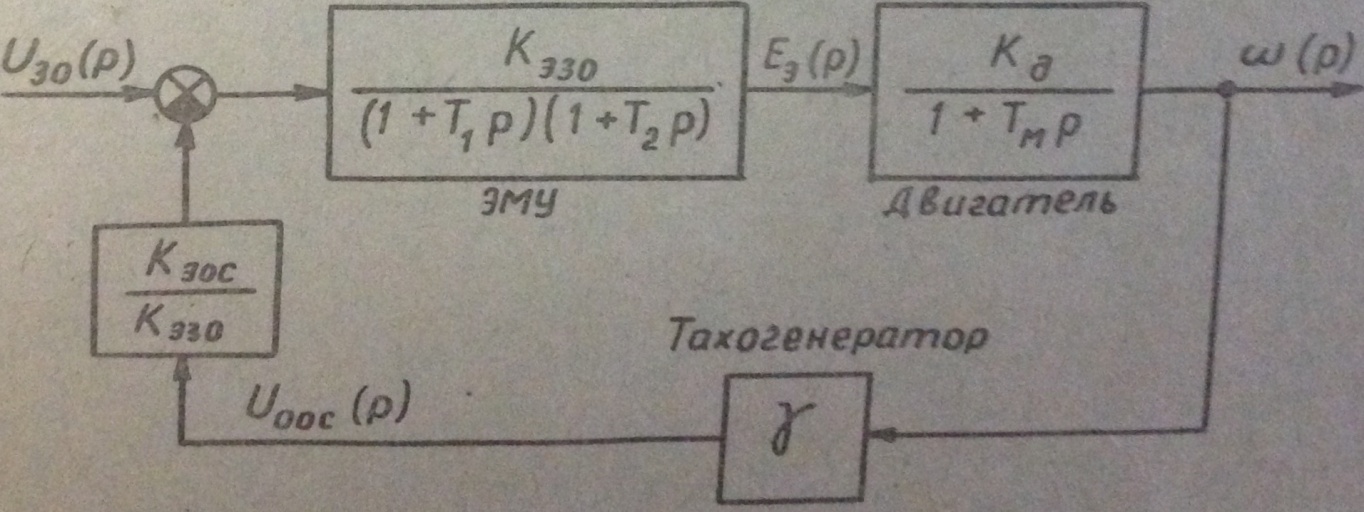
Рис.3. Структурная схема системы ЭМУ – Д
KЗООС = 11.3 – коэффициент усиления ЭМУ по напряжению для обмотки обратной связи;T1 = 0.108с – электромагнитная постоянная времени первого каскада ЭМУ в замкнутой системе.
Для оценки динамики замкнутой системы ЭМУ-Д по уравнению (2) с использованием теоремы разложения рассчитан переходной процесс отработки ступенчатого управляющего воздействии.
Как видно из рис.2, процесс характеризуется значительным перерегулированием и большой колебательностью. Поэтому с целью улучшения динамики в схеме применена гибкая обратная связь по напряжению ЭМУ. Эта связь подает сигнал на вход ЭМУ (обмотка ОУ III) таким образом, чтобы уменьшалось перерегулирование и колебании напряжения ЭМУ и скорости двигателя. Обмотка ОУ III включена через конденсатор C, поэтому ток в ней проходит только при переходных процессах. Обмотка должна быть подключена таким образом, чтобы при изменении напряжения ЭМУ поток этой обмотки препятствовал возникающему изменению: при увеличении UЭМУ он размагничивает ЭМУ, а при уменьшении UЭМУ – подмагничивает.
Неправильно включенная гибкая обратная связь будет усиливать колебания.
Программа работы
Собрать схему представленную на рис.1.
Снять внешние характеристики ЭМУ при различных степенях компенсации реакции якоря:
R2 = 4 Ом, R2 = 14 Ом, R2 = 36 Ом.
Настроить систему ЭМУ – Д и снять скоростные характеристики ω = f(IЯ):
Разомкнутой системы при ω0 = 145 рад/с;
Замкнутой системы при том же задающем напряжении и R5 = 10 кОм, R5 = 500 Ом, R5 = 100 Ом;
Замкнутой системы при ω0 = 145 рад/с и R5 = 10 кОм, R5 = 500 Ом, R5 = 100 Ом;
Зависимость UЭМУ = f(IЯ) для R5 = , R5 = 10 кОм, R5 = 500 Ом, R5 = 100 Ом;
Проследить влияние стабилизирующего конденсатора при R5 = 100 Ом и влияние сопротивления резистора R7.
Ход выполнения лабораторной работы.
Внешние характеристики ЭМУ при различных степенях компенсации реакции якоря.
R2=36 Ом |
Uэму, В |
220 |
210 |
200 |
185 |
175 |
Iя,А |
0 |
3 |
7.5 |
16 |
23 |
|
R2=14 Ом |
Uэму, В |
220 |
205 |
190 |
170 |
150 |
Iя,А |
0 |
3 |
7 |
15 |
20 |
|
R2=4 Ом |
Uэму, В |
220 |
195 |
170 |
135 |
110 |
Iя,А |
0 |
2.5 |
6.5 |
12 |
15.5 |

Рис 4. Внешние характеристики ЭМУ при: 1 – R2=36 Ом, 2 – R2=14 Ом, 3 – R2=4 Ом.
Скоростные характеристики
Система |
R5, кОм |
Опытные данные |
|||||||
Разомкнутая |
|
Uтг, В |
64 |
63 |
62 |
58 |
56 |
55 |
52 |
, рад/с |
116.6 |
114.7 |
112.9 |
105.6 |
102 |
100.2 |
94.7 |
||
Iя, А |
0.4 |
0.9 |
0.95 |
1.7 |
2 |
2.3 |
3 |
||
Замкнутая |
0.5 |
Uтг, В |
20 |
18 |
17 |
16 |
15 |
14 |
13 |
, рад/с |
36.4 |
32.8 |
31 |
29.1 |
27.3 |
25.5 |
23.7 |
||
Iя, А |
0.4 |
0.7 |
0.9 |
1.5 |
1.8 |
2.1 |
2.5 |
||
2 |
Uтг, В |
24 |
21 |
20 |
20 |
19 |
19 |
18 |
|
, рад/с |
43.7 |
38.2 |
36.4 |
36.4 |
34.6 |
34.6 |
32.8 |
||
Iя, А |
0.9 |
1.5 |
1.8 |
2.2 |
2.7 |
3.1 |
3.6 |
||
10 |
Uтг, В |
40 |
39 |
38 |
36 |
35 |
33 |
31 |
|
, рад/с |
72.8 |
71 |
69.2 |
65.6 |
63.7 |
60.1 |
56.5 |
||
Iя, А |
0.8 |
0.9 |
1.6 |
1.9 |
2.2 |
2.8 |
3.1 |
||

Рис 5. Скоростные характеристики при: 1 – разомкнутой системы, 2 – замкнутой системы при R5=500 Ом, 3 – замкнутой системы при R5=2 кОм, 4 – замкнутой системы при R5=10 кОм
Зависимость Uэму=f(Iя)
R5, кОм |
Опытные данные |
||||||
0.5 |
Uэму, В |
260 |
260 |
260 |
260 |
260 |
260 |
Iя, А |
0.4 |
0.9 |
1.5 |
1.8 |
2 |
2.5 |
|
2 |
Uэму, В |
240 |
238 |
236 |
234 |
232 |
230 |
Iя, А |
0.4 |
0.8 |
1.4 |
1.6 |
1.9 |
2.3 |
|
2.5 |
Uэму, В |
150 |
147 |
145 |
141 |
138 |
134 |
Iя, А |
0.3 |
0.5 |
0.9 |
1.1 |
1.3 |
1.5 |
|

Рис 6. Внешние характеристики ЭМУ при: 1 – при R5=500 Ом, 2 – при R5=2 кОм, 3 – при R5=10 кОм

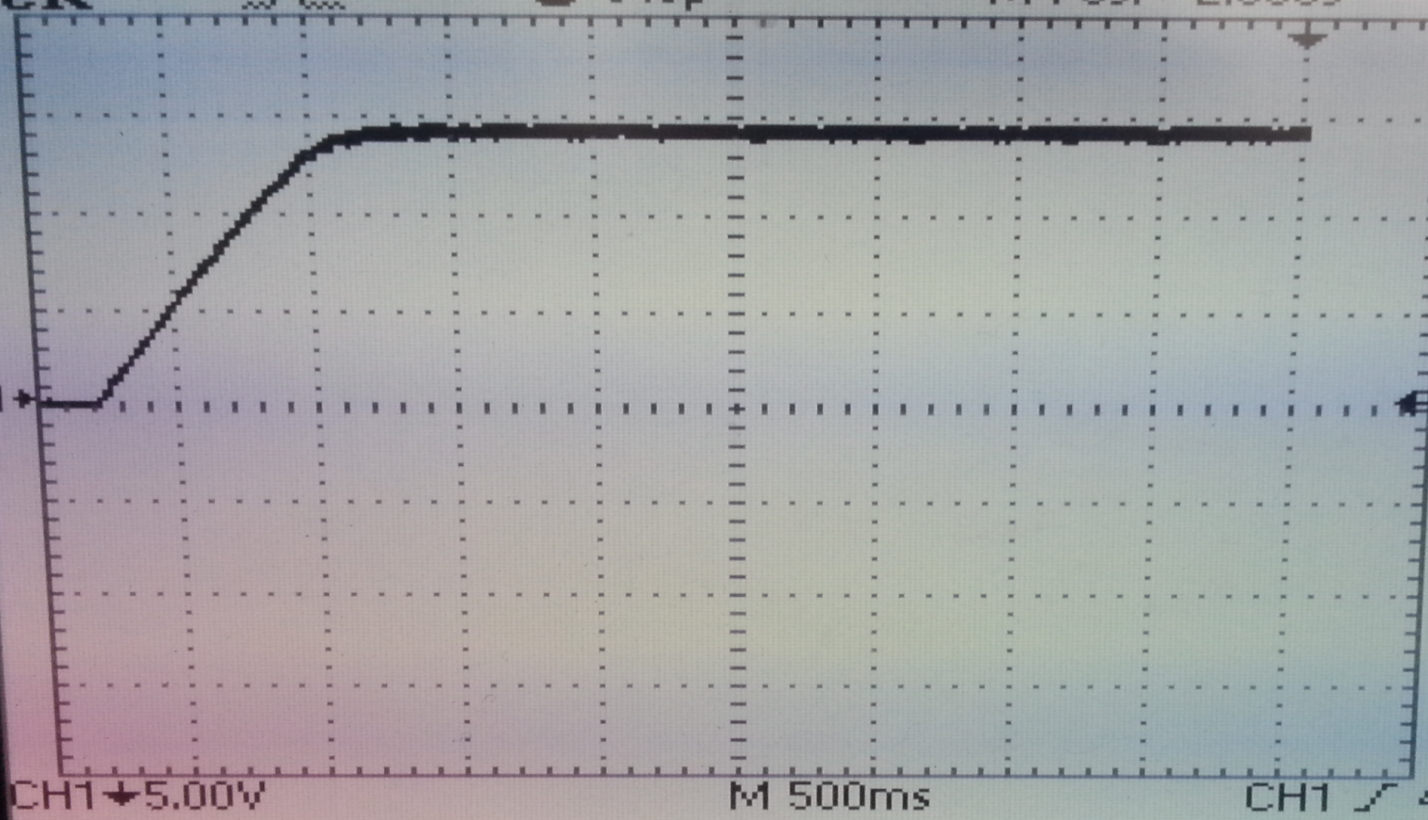
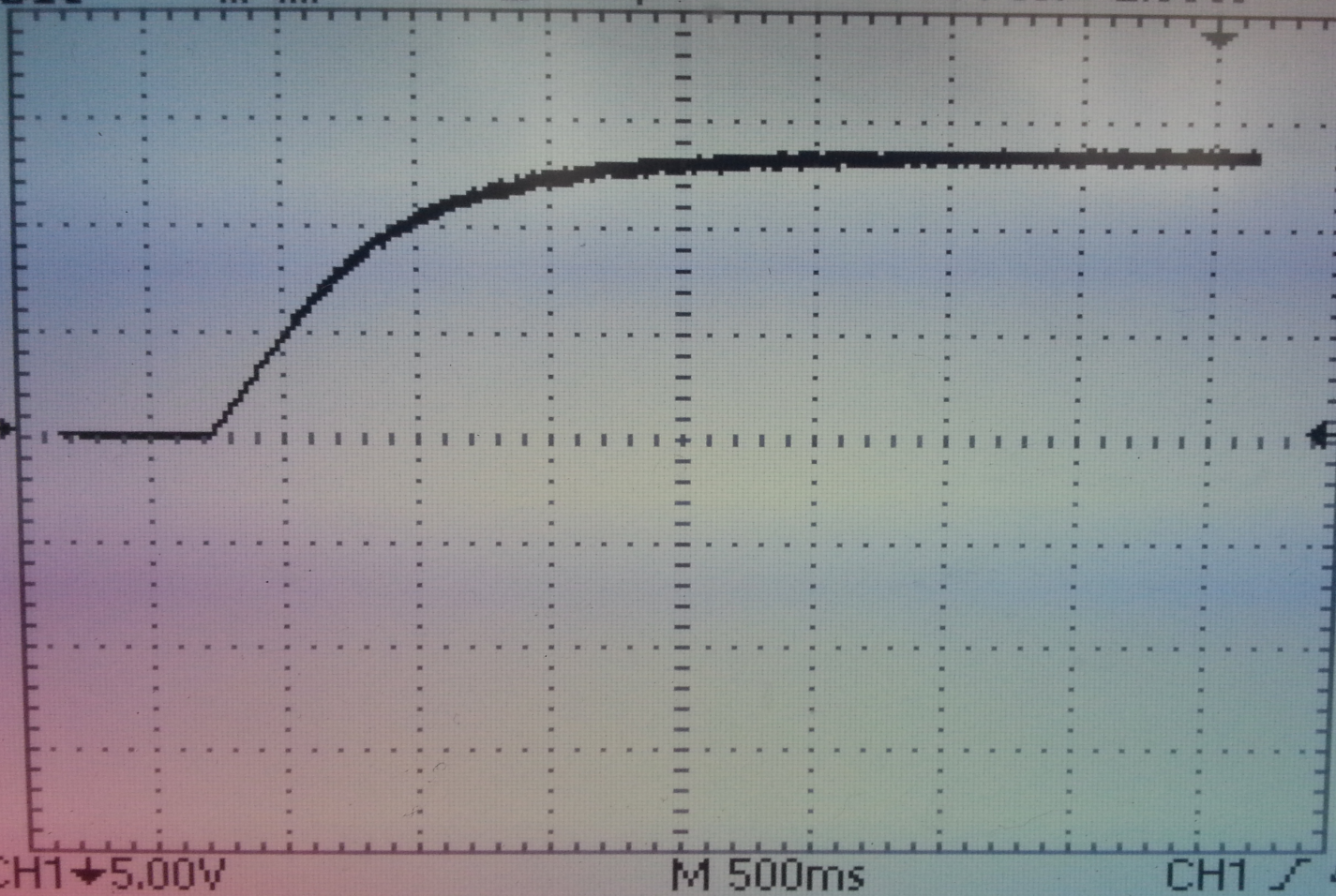
а) б)
Рис 5. Осциллограммы переходного процесса пуска двигателя а) при отключенной гибкой обратной связи б) при включенной гибкой обратной связи.
Вывод: в ходе данной лабораторной работы были исследованы статические и динамические характеристики ЭМУ. Из рис. 4 видно, что реакция якоря оказывает существенное влияние на внешнюю характеристику ЭМУ, с повышение степени компенсации реакции якоря характеристика ЭМУ становится более жесткой. Также с повышением коэффициента обратной связи по скорости жесткость механической характеристики становится больше, но при этом падает скорость идеального холостого хода. Без обратной связи с конденсатором (гибкой обратной связи) в переходных режимах ЭМУ наблюдается перерегулирование.
Так как конденсатор не пропускает постоянный ток, то эта обратная связь работает только в переходных режимах, а, следовательно, не влияет на механические характеристики ЭМУ. Из осциллограмм видно, что гибкая обратная связь убирает перерегулирование, но увеличивает время переходного процесса до 0.8 с.