

Программа работы
Ознакомиться с настоящей инструкцией.
Изучить техдокументацию на выпрямители ТПЕ [2].
Изучить конструкцию электропривода.
Подать переменное напряжение на стенд и произвести пуск привода.
Снять скоростные характеристики привода ω=f(I) при трех значениях скорости в пределах диапазона регулирования с П- и ПИ-регуляторами скорости.
Снять осциллограммы переходных процессов ω=f(t) и I=f(t)
при пуске и торможении двигателя, при набросе и сбросе нагрузки, сП-и ПИ-регуляторамн скорости. Оценить качество регулирования.
Исследовать влияние адаптивного регулятора на работу привода, для чего:
снять осциллограммы ω=f(t) без сигнала адаптации, с установленным сигналом адаптации, с максимальным сигналом адаптации;
снять осциллограммы ω=f(t) при величинах электромеханической
постоянной ТЭМ и ЗТЭМ, включив в цепь якоря двигателя добавочное сопротивление RД0Б = 2rя, где rя - сопротивление обмотки якоря двигателя;
оценить полученные результаты.
Сделать выводы по работе.
Пояснения к работе
Выпрямители представляют собой преобразовательные устройства, обеспечивающие выпрямление и регулирование величины выходного напряжения при питании их от сети переменного тока. Выпрямители имеют систему импульсно-фазового управления силовыми преобразовательными мостами и набор ячеек регулирования, что позволяет создавать устройства для комплектных электроприводов постоянного тока, использовать выпрямители в устройствах регулирования и стабилизации тока и напряжения, в зарядных устройствах для аккумуляторов и др. Выпрямители выпускаются двух исполнений — ТПЕ-10 и ТПЕ-25 на токи 10 А и 25 А соответственно.
В настоящей лабораторной работе исследуется электропривод постоянного тока на базе ТПЕ-25/25230, имеющий следующие основные технические данные:
напряжение питающей сети - трехфазное, 380 В, 50 Гц;
исполнение привода - трансформаторное;
выпрямленное напряжение - 230 В;
выпрямленный ток - 25 А;
диапазон регулирования скорости - 10000;
исполнение - реверсивное.
Электропривод конструктивно представляет собой устройство, выполненное в открытом исполнении и предназначенное для встраивания в шкаф. Он состоит из силового тиристорного блока (СБ), представляющего собой трехфазный реверсивный выпрямитель, силового трансформатора, электродвигателя со встроенным тахогенератором, задатчика скорости, аппаратуры управления и защиты и ряда блоков управления и регулирования блока линейных регуляторов (БЛР), блока датчика тока (БДТ), блока фагового управления (БФУ), блока раздельного управления (ВРУ) и блока адаптивного регулятора (БАР).
Выпрямитель ТПЕ собран в блочной унифицированной кассете. Схемы блоков управления и регулирования выполнены на печатных платах присоединение которых к общей схеме осуществляется при помощи разъемов. Такое исполнение выпрямителя обеспечивает удобство напалки и обслуживания электропривода.
Функциональная схема электропривода на базе ТПЕ приведена нз рис. 1.
Схема регулирования скорости электропривода выполнена по принципу подчиненного управления и содержит внешний контур регулирования скорости с ПИ (П)-регулятором и внутренний контур тока с ПИ (П)-регулятором.
Сигналы задания и обратной связи по скорости подаются на соответствующие входы БЛР и БАР. При работе привода сигнал с выхода БЛР подается на вход управляющего органа (УО) и на вход БРУ. В последнем в зависимости от знака задания тока формируются логические сигналыопределяющие направление вращения двигателя.
При изменении знака задающего сигнала U3меняется знак напряжения на выходе БЛР. Это ведет к изменению состояния нуль - органа БГУ и к подготовке логического устройства (ЛУ) к переключению. Процесс переключения начинается после снятия блокирующих сигналов с выхода датчика состояния вентилей (ДСВ) и с выхода формирователя длительности им пульсов БФУ. Первый сигнал блокировки снимается при условии, что рос вентили СБ находятся в запертом состоянии, а второй - при наличии высо кого уровня сигнала на выходе формирователя длительности импульсов После снятия указанных блокировок начинается отсчет выдержки времени tв БРУ, составляющей около 5 мс, после чего происходит изменение со стояния второго выхода ЛУ. При этом разрешается подача импульсор на комплект вентилей СБ, определяющих обратное направление вращения двигателя.
Начальный угол управления анач устанавливается равным примерно 110÷120 эл. градусов с помощью резистора R7в УО при выходном напряжении с выхода БЛР, равном нулю. В УО также осуществляется ограничение углов amin и атах: атах≈ 150÷160 эл. град, amin устанавливаю таким, чтобы обеспечить максимальную скорость двигателя при напряжении сети 0,9×Uн.
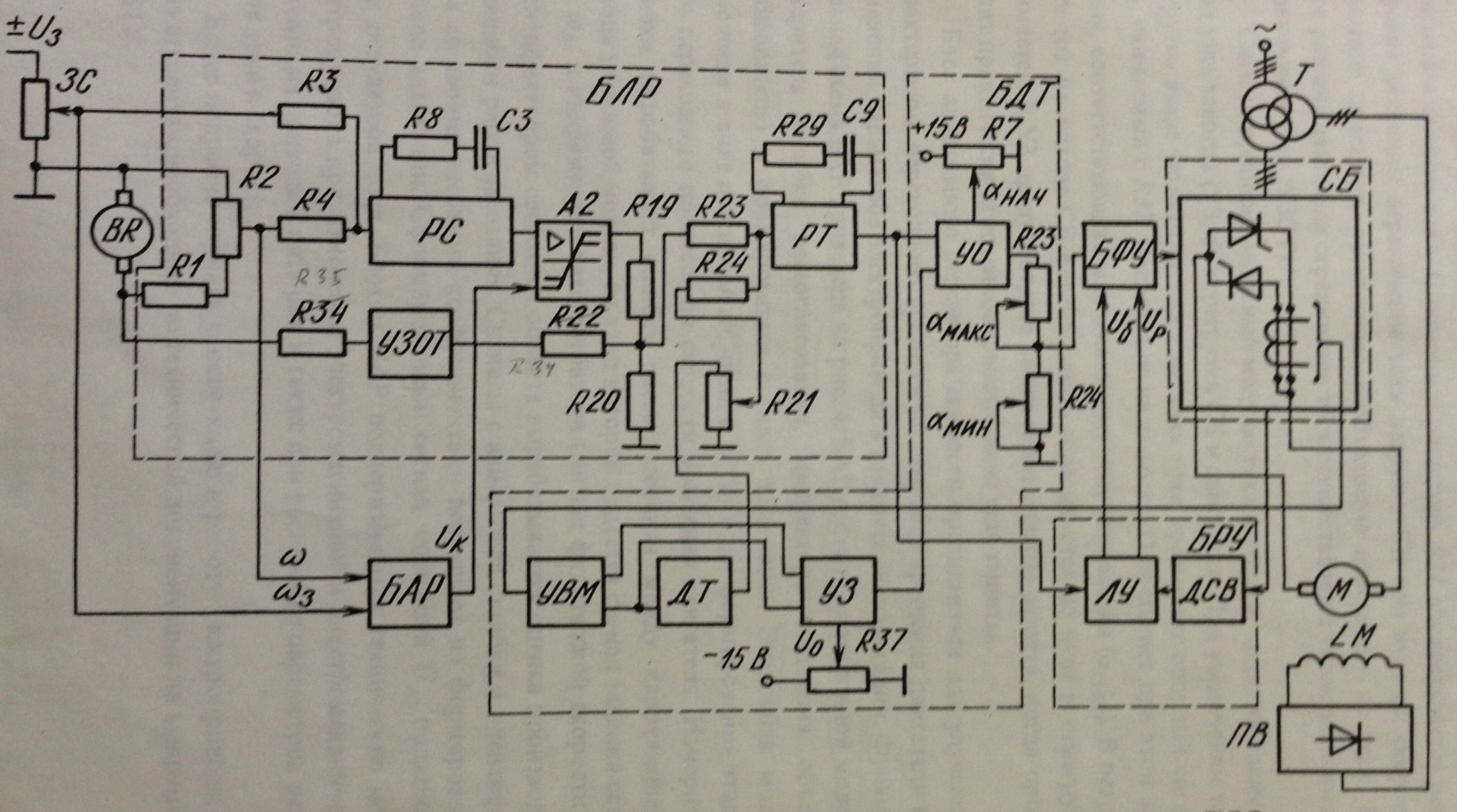
Рис.1 Функциональная схема электропривода на базе выпрямителя ТПЕ
Haвходе регулятора тока сигнал обратной связи по току сравнивается с сигналом задания тока. С помощью резистора R21осуществляется регулировка ветчины ограничения тока нагрузки СБ при нулевой скорости вращения двигателя, обеспечивая необходимую перегрузку по току. По мере разгона двигателя ограничение тока осуществляется узлом зависимого ограничения тока (УЮТ).
Сигнал. пропорциональный модулю тока нагрузки, подается также на входеузла защиты (УЗ) от перегрузки СБ и двигателя. При увеличении тока загрузки выше уставки сигнал с датчика тока превышает опорный сигнал Ufaснимаемый с R37.Напряжение на выходе УО достигает при этом значении соответствующего максимальному углу управления (атах). В результате ток на выходе СБфорсированно сбрасывается до нуля и перегрузка снимается. ВУЗ предусмотрена также максимальная защита, когда происходит практически мгновенное срабатывание узла защиты.
Блок адаптивного регулятора скорости предназначен для улучшения характеристик переходного процесса по скорости вращения двигателя при изменении параметров электропривода в процессе эксплуатации. Функциональная схема БАР приведена на рис. 2. БАР состоит из эталонной модели, измерителя ошибки рассогласования, индикатора состояния объекта наблюдателя; и формирователя сигнала адаптации. Эталонная модель выполнена в виде пассивной ЛС-цепи и служит для формирования эталонного переходного процесса по скорости вращения двигателя. Измеритель ошибки вырабатывает ошибку рассогласования между напряжением с выхода эталонной модели, на вход которой подается сигнал задания скорости и напряжением тахогенератора (сигнал фактической скорости ω). Иденткфикатором состояния объекта вырабатывается оценка производной от ошибки рассогласования. Сигналы с измерителя ошибки и идентификатора со своими весовыми коэффициентами поступают на формирователь сигнала адаптации. Сформированный сигнал адаптации Uк подается навход регулятора тока. Блоком БАР поддерживаются технические нормы электропривода при изменении электромагнитной и электромеханической постоянных привода в пять раз, а также при расстройке параметров регуляторов тока и скорости.
Более подробно изучить конструкцию и работу электропривода и его узлов студентам необходимо по технической документации на выпрямители.
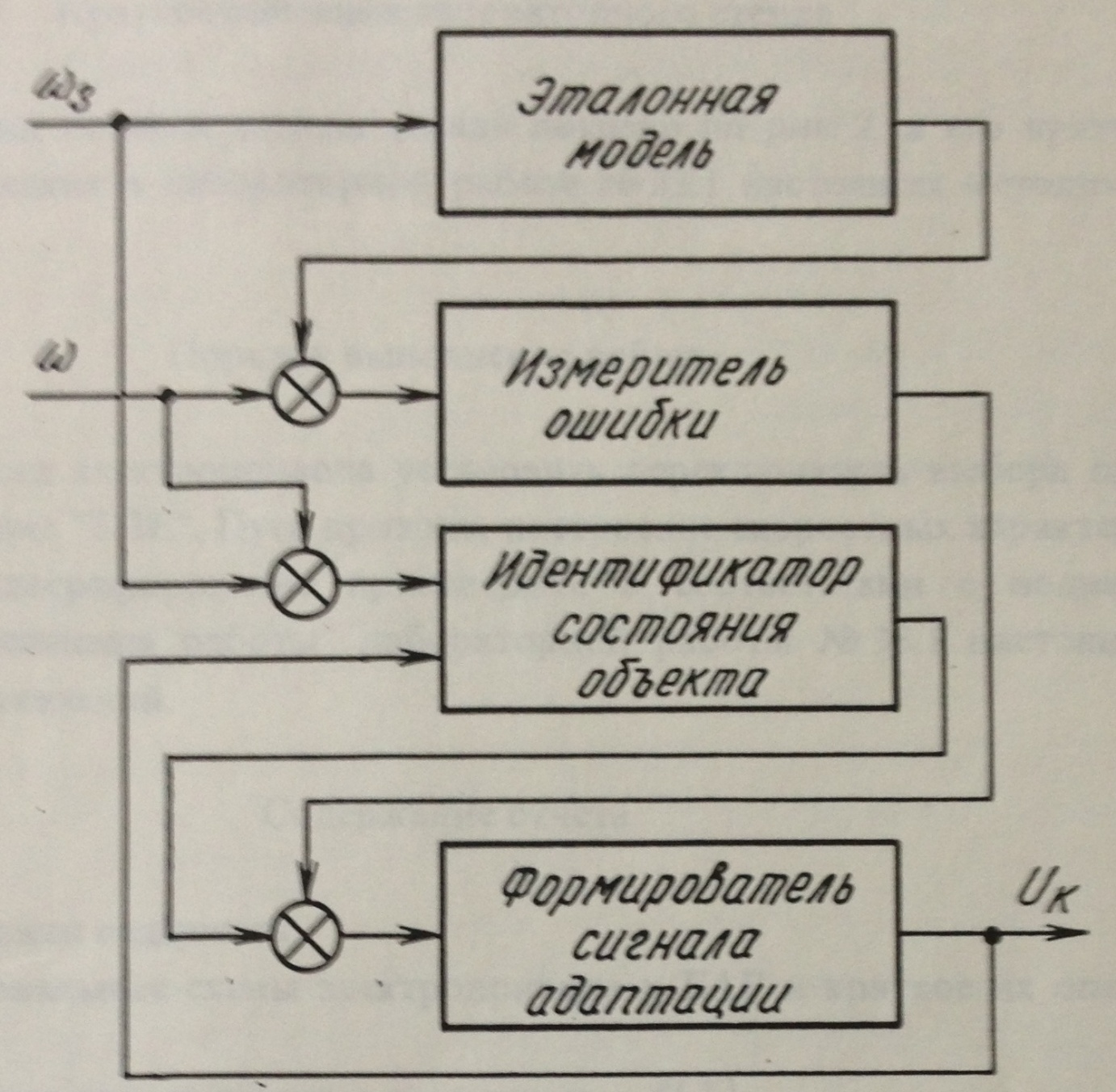
Рис.2 Функциональная схема БАР
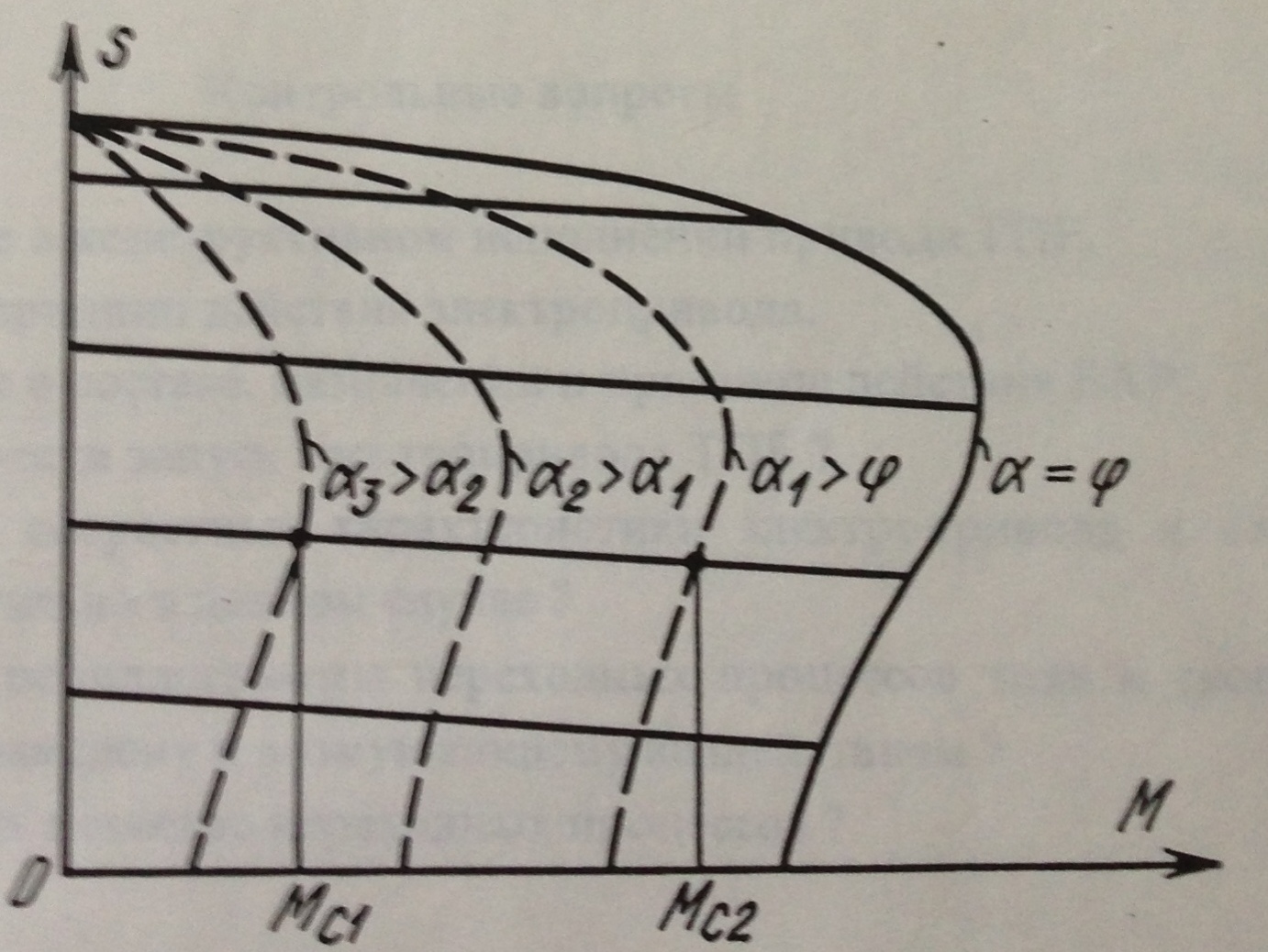
Рис.3 Механическая характеристика электропривода в замкнутой системе регулирования