

Лабораторная работа № 33.1
«Изучение конструкции, принципа действия, основных систем и исследование комплектного электропривода эпу1-2п»
Цель работы: изучение конструкции и принципа действия электропривода, расположения основных элементов и узлов, принципов их построения и функционирования. Исследование статических и динамических характеристик в различных режимах работы электропривода.
Программа работы
Ознакомиться с настоящей инструкцией и изучить техническую документацию на электропривод ЭПУ1-2П [1].
Изучить конструкцию электропривода.
Подать переменное напряжение на стенд и произвести пуск привода.
Снять скоростные характеристики привода ω=f(I) при трех значениях U3 в пределах диапазона регулирования.
Снять осциллограммы переходных процессов ω=f(t) и I=f(t)
при пуске и торможении двигателя, при набросе и сбросе нагрузки. Оценить качество регулирования.
Снять осциллограммы переходных процессов ω=f(t) и I=f(t) при пуске двигателя с обратной связью по току и без нее. Оценить влияние обратной связи по току на динамику электропривода.
Сформулировать выводы по работе.
Пояснения к работе
В настоящей лабораторной работе изучается и исследуется реверсивный электропривод ЭПУ 1-2-3427П04, предназначенный для привода подачи металлорежущих станков.
Основные технические данные электропривода:
напряжение питающей сети - трехфазное, 380 В, 50 Гц;
исполнение привода - трансформаторное;
выпрямленное напряжение - 230 В;
выпрямленный ток - 25 А;
диапазон регулирования скорости - до 10000;
исполнение - реверсивное.
Электропривод конструктивно представляет собой комплектное устройство в открытом исполнении, предназначенное для встраивания в шкафы. Он состоит из блока управления (преобразователя, реализованного на силовых оптронных тиристорных модулях, с системой управления и регулирования), силового трансформатора, электродвигателя с встроенным тахогенератором, задатчика скорости, аппаратуры управления и защиты. Конструктивно блок управления состоит из силового блока и поворотного блока с двумя печатными платами - платой управления и платой регулирования. Блочная конструкция и разъемные соединения печатных плат обеспечивают возможность и удобство ремонта, обслуживания и наладки привода.
Функциональная схема электропривода приведена на рис. 1. Силовая схема электропривода состоит из двух полностью управляемых трехфазных мостовых выпрямителей, включенных встречно-параллельно и работающих по принципу раздельного управления. Система регулирования электропривода выполнена одноконтурной с ПИ-регулятором скорости (PC) и обратной связью по току IЯ на входе управляющего органа (УО). Тиристорный преобразователь якоря (ТПЯ) управляется трехканальной СИФУ, содержащей формирователи импульсов (ФИ1-ФИЗ). Подача управляющего сигнала, а также его смещение (анач) и ограничение (аmin, amax)осуществляются с помощью переменных резисторов УО R26, R40, R39 соответственно. Импульсы управления с комплекта вентилей "В" на комплект вентилей "Н" ТПЯ (и наоборот) переключаются блоком логического устройства (ЛУ), которое работает в функции сигнала задания направления тока и выходного сигнала датчика проводимости вентилей (ДП). Сигнал задания направления тока на вход ЛУ поступает с выхода нелинейного звена НЗ. Звенья НЗ и ФПЕ (функциональный преобразователь ЭДС) с резистором R47 образуют устройство линеаризации характеристик электропривода в режиме прерывистого тока. При этом коэффициент передачи НЗ обратно пропорционален коэффициенту передачи ТПЯ, а коэффициент передачи ФПЕ имеет зависимость вида у = arcsinE (Е - относительная ЭДС двигателя) и компенсирует внутреннюю отрицательную обратную связь по ЭДС двигателя. С помощью устройства линеаризации поддерживается примерно одинаковый коэффициент усиления преобразователя.
Для согласования реверсивного сигнала НЗ с нереверсивной регулировочной характеристикой УО служит переключатель характеристик (ПХ), управляемый ЛУ (ключи "В" и "Н").
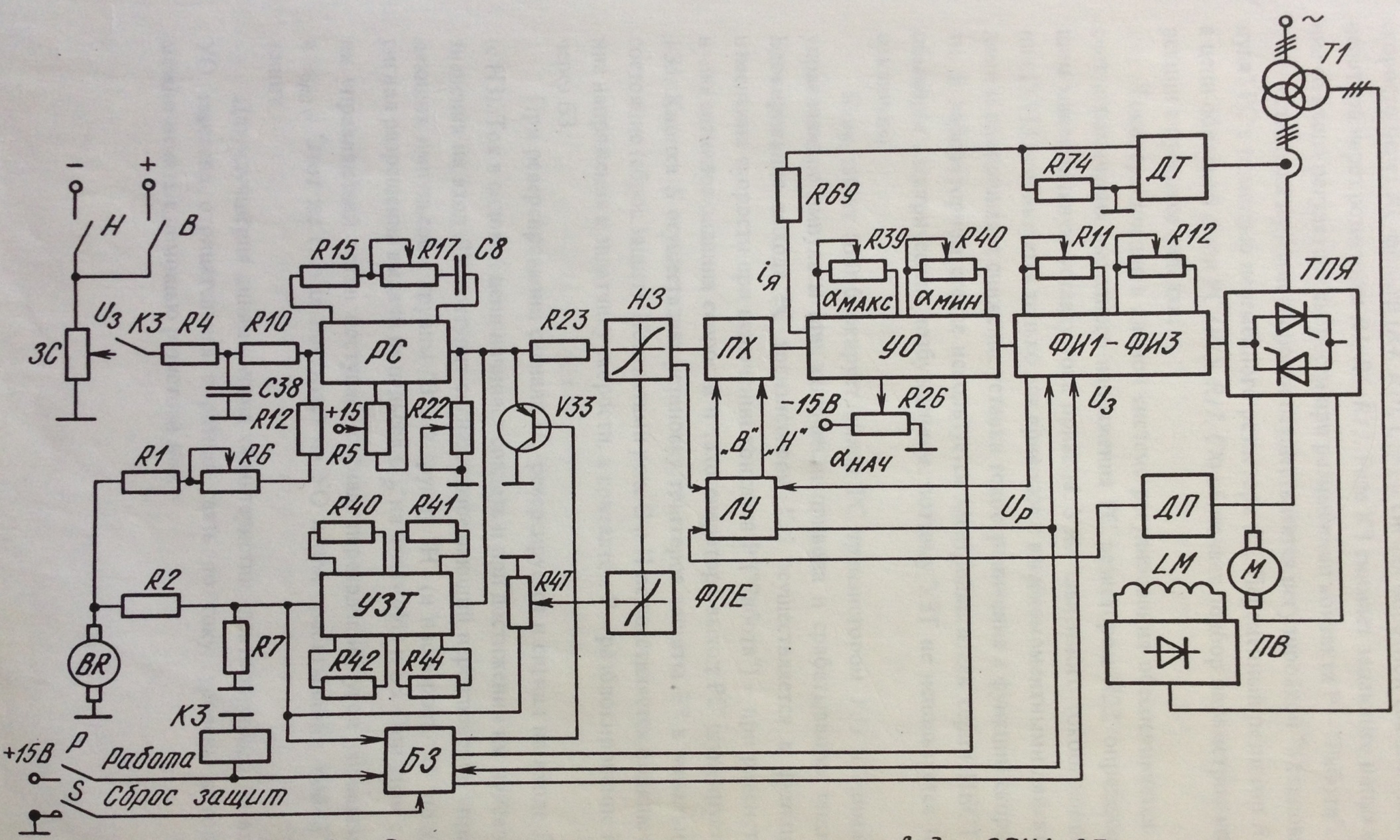
Рис.1 Функциональная схема электропривода ЭПУ – 2П
На входе PC суммируются сигнал задания скорости U3 с задатчика скорости через RС-фильтр (R4, RJO, С38) и сигнал обратной связи с тахогенератора через резисторы RI, R6, R12. Реле КЗ снимает задающее напряжение со входа регулятора скорости при размыкании контакта Р - "Работа".
Установка нулевой скорости осуществляется регулировкой "Установка нуля" PC с помощью переменного резистора R5. Переменный резистор R17 в цепи обратной связи PC (R15, R17, С8) облегчает подбор параметров коррекции в процессе наладки.
Токоограничение в данной системе регулирования обеспечивается за счет ограничения выходного напряжения PC резистором R22, определяющим максимальную уставку тока привода. Узел зависимого токоограничения (УЗТ) используется только для приводов с высокомоментными двигателями и обеспечивает снижение уставки токоограничения в функции скорости. В лабораторном стенде используется электродвигатель серии ПБСТ с обычным электрическим возбуждением, поэтому УЗТ не используется (он отключен).
Блок зашит (БЗ) блокирует выход PC транзистором V33 и снимает управляющие импульсы при включении привода и срабатывании защит. Блокирование выхода PC транзистором V33 осуществляется в функции изменения скорости при включении контакта Р ("Работа") - при равенстве нулю сигналов задания скорости и тахогенератора выход PC шунтируется УЗЗ. Кнопка 5 осуществляет установку триггеров защиты БЗ в начальное состояние (сброс защит). Контактами реле В и Н осуществляется подключение напряжения к задатчику скорости, а контактом Р - разблокирование PC через БЗ.
При реверсировании сигнала U3 реверсируется и сигнал на входе ЛУ (с НЗ). Ток в силовой цепи начинает спадать и при достижении им нулевого значения на вход ЛУ поступит сигнал, разрешающий переключение управляющих импульсов с группы "В" на группу "Н" (и наоборот). ЛУ подает сигнал разрешения выдачи импульсов Uр на ФИ1-ФИЗ и БЗ. При этом с БЗ на управляющий орган поступает сигнал, переводящий угол управления в amax. Этот же сигнал поступает на УО и при срабатывании любой из зашит.
Для улучшения динамических характеристик электропривода на вход УО заведена отрицательная обратная связь по току, уровень которой можно менять с помощью резистора R69.
При настройке электропривода устанавливают αнач≈110÷120 эл.град, αmax≈150÷160 эл.град, αmin выбирают таким, чтобы обеспечим максимальную скорость двигателя при напряжении сети 0,9×Uн.
Резисторами R1 и R6 устанавливают такую величину тока в цепи обратной связи по скорости, чтобы при питающем сигнале ±10 В обеспечивалась скорость двигателя ±nmax.
Резистором R47 производят компенсацию внутренней обратной связи по ЭДС двигателя, в частности обеспечивают прямоугольную токовую диаграмму в переходных процессах во всем диапазоне изменения скорости вращения двигателя. Регулирование резистором R47 существенно сказывается при скоростях n > 0,5×nн.
Блок защит обеспечивает следующие виды защит:
от исчезновения напряжения в силовой цепи и цени управления;
от токовых перегрузок (максимально-токовую защиту, времятоковую защиту на пусковой характеристике двигателя);
от перегрева двигателя;
от перегрева преобразователя;
от обрыва цепи тахогенератора;
от превышения максимальной скорости;
от неправильного чередования фаз сети управления.
Более подробно изучить построение и работу электропривода и его узлов можно по технической документации на электроприводы серии ЭПУ1[I].