

10.Механические характеристики дпт последовательного возбуждения.
Для электродвигателя последовательного возбуждения, принципиальная схема включения которого представлена на рис. 3.10, уравнение электромеханической характеристики, так же как и для двигателя независимого возбуждения, имеет вид:
![]() ,
где R—
суммарное сопротивление якорной цепи,
состоящее из сопротивления обмотки
якоря, обмотки возбуждения и сопротивления
внешнего резистора.
,
где R—
суммарное сопротивление якорной цепи,
состоящее из сопротивления обмотки
якоря, обмотки возбуждения и сопротивления
внешнего резистора.
В отличие от двигателя независимого возбуждения здесь магнитный поток Ф является функцией тока якоря I. Эта зависимость, приведенная на рис. 3.11, носит название кривой намагничивания. Так как нет точного аналитического выражения для кривой намагничивания, то трудно дать и точное аналитическое выражение для механической характеристики двигателя последовательного возбуждения.
Если для упрощения анализа предположить, пренебрегая насыщением магнитной системы, линейную зависимость между потоком и током якоря, как это показано пунктиром
на
рис. 3.11, т. е. считать
![]() ,
то момент двигателя
,
то момент двигателя
![]() (3.28)
(3.28)
Подставив
в равенство для угловой скорости
двигателя значение тока из (3.28), получим
выражение для МХ:
![]() (3.29)
(3.29)
О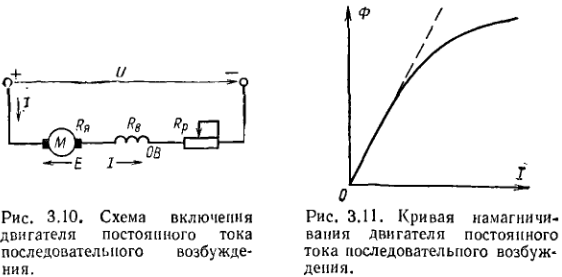 собенностью
МХ двигателя последовательного
возбуждения является ее большая крутизна
в области малых значений момента.
собенностью
МХ двигателя последовательного
возбуждения является ее большая крутизна
в области малых значений момента.
Значительное увеличение угловой скорости при малых нагрузках обусловливается соответствующим уменьшением магнитного потока.
Уравнение
(3.29) дает лишь общее представление о
механической характеристике двигателя
последовательного возбуждения. При
расчетах этим уравнением пользоваться
нельзя, так как машин с ненасыщенной
магнитной системой обычно в современной
практике не строят. Вследствие того,
что действительные механические
характеристики сильно отличаются от
кривой, выраженной уравнением (3.29),
построение характеристик приходится
вести графоаналитическими способами.
Обычно построение искусственных
характеристик производится на основании
данных каталогов, где приводятся
естественные характеристики: n=
![]()
Д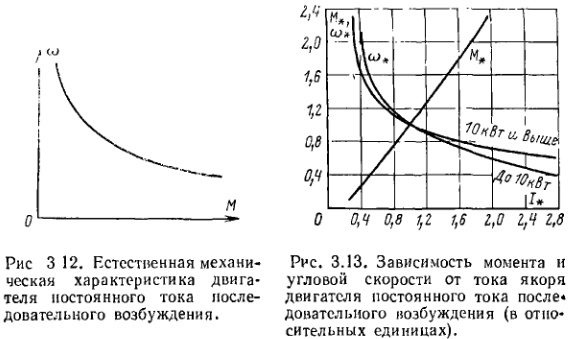 ля
серии двигателей определенного типа
эти характеристики могут быть даны
в относительных единицах:
ля
серии двигателей определенного типа
эти характеристики могут быть даны
в относительных единицах:
![]() .
Такие характеристики, называемые
универсальными, представлены на рис.
3.13.
.
Такие характеристики, называемые
универсальными, представлены на рис.
3.13.
Отметим, что в каталогах дается зависимость момента па валу двигателя от тока. При построении механических характеристик принимается зависимость угловой скорости от электромагнитного момента. Это практически допустимо ввиду небольшой разницы между электромагнитным моментом и моментом на валу
11. Тормозные режимы дпт последовательного возбуждения.
ДПВ в обычной схеме имеют только 2 режима: противовключение и динамическое торможение.
Т
 орможение
противовключением является для ДВП
основным и применяется для грузоподъемных
механизмов. Для перевода из двигательного
режима, (он соотв подъему груза), в режим
противовключения, (тормозной спуск), в
цепь якоря вводится добавочное
сопротивление(Rдоб).
Момент двигателя становится меньше
статического (см. т. В характеристики),
подъем груза прекращается. Под действием
МС
груз начинает опускаться, вращая якорь
в обратн напр-ии. При скорости,
соответствующей т.С, М двигателя
сравняется с МС
и спуск будет происходить с постоянной
скоростью. При изменении направления
вращения ЭДС двигателя изменит знак.
Ток якоря
орможение
противовключением является для ДВП
основным и применяется для грузоподъемных
механизмов. Для перевода из двигательного
режима, (он соотв подъему груза), в режим
противовключения, (тормозной спуск), в
цепь якоря вводится добавочное
сопротивление(Rдоб).
Момент двигателя становится меньше
статического (см. т. В характеристики),
подъем груза прекращается. Под действием
МС
груз начинает опускаться, вращая якорь
в обратн напр-ии. При скорости,
соответствующей т.С, М двигателя
сравняется с МС
и спуск будет происходить с постоянной
скоростью. При изменении направления
вращения ЭДС двигателя изменит знак.
Ток якоря
 увелич, а М по отношению к МС,
создаваемому грузом, будет тормозным.
увелич, а М по отношению к МС,
создаваемому грузом, будет тормозным.
Д ля
торможения противовключ-ем надо на ходу
изменить полярность питания якоря, не
меняя направления тока в обмотке
возбуждения согласно следующей схеме.
Для ограничения первоначального броска
тока и момента в цепь якоря должно быть
введено значительное Rдоб,т.к.
ток может возрасти в 30-40 раз
ля
торможения противовключ-ем надо на ходу
изменить полярность питания якоря, не
меняя направления тока в обмотке
возбуждения согласно следующей схеме.
Для ограничения первоначального броска
тока и момента в цепь якоря должно быть
введено значительное Rдоб,т.к.
ток может возрасти в 30-40 раз
Переход из двигательного в тормозной режим изображен на графике. При измен полярности питания якоря двигателя переходит из т.А на характеристику в т.В и останавливается в т.С. Если после остановки его не отключить, двигатель будет разгоняться в противоположном напр-ии и новый уст. режим наступит в т.Д.

 Дин-ое
торможение ДПВ осущ. 2-мя способами: с
самовозбуждением и с независимым
возбуждением. При торможении с самовозбужд
двигатель отключ от сети и замыкается
на тормозное сопрот-ие. И работает как
генератор с самовозбужд. Условием этого
способа явл наличие самовозбужд. При
вращении якоря за счет кинетической
энергии груза в якоре от остаточного
магнетизма будет наводится ЭДС. Ток,
созданный наведенной ЭДС, усилит
магнитный поток, и ЭДС что приведет к
увеличению тока. Это значит, что при
переводе машины из двиг режима в тормозной
необходимо переключить
Дин-ое
торможение ДПВ осущ. 2-мя способами: с
самовозбуждением и с независимым
возбуждением. При торможении с самовозбужд
двигатель отключ от сети и замыкается
на тормозное сопрот-ие. И работает как
генератор с самовозбужд. Условием этого
способа явл наличие самовозбужд. При
вращении якоря за счет кинетической
энергии груза в якоре от остаточного
магнетизма будет наводится ЭДС. Ток,
созданный наведенной ЭДС, усилит
магнитный поток, и ЭДС что приведет к
увеличению тока. Это значит, что при
переводе машины из двиг режима в тормозной
необходимо переключить