

24. Силы и моменты, действующие в электроприводе. Уравнение движения электропривода
![]()
![]()
![]()
- уравнение равновесия сил при поступательном движении
![]() -
уравнение движения электропривода
-
уравнение движения электропривода
Из анализа уравнения движения видно
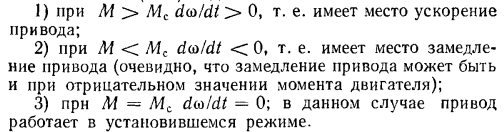

![]()
Знак «+» указывает на вращающий х-р момента сопротивления.
Момент сопротивления состоит из 2-х составляющих: кот. соответствуют полезной работе и работе трения. Также момент сопротивления можно разделить на активный (или потенциальный) и реактивный. Активные статические моменты – такие моменты сопротивления, кот. сохраняют свой знак при изменении направления вращения (н-р, момент от груза подъемного механизма при подъеме препятствует движению, а при опускании способствует). Активные моменты часто называют потенциальными, т.к. они связаны с изменением потенциальной энергии отдельных элементов привода.
Реактивные моменты изменяют свой знак при изменении направления вращения. Они препятствуют движению привода (н-р, момент сопротивления от сжатия, резания и т.д.)
Уравнение движения в общем виде
![]()
Выбор знаков определяется режимом работы электропривода
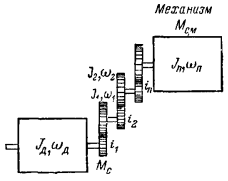
25. Приведение моментов сопротивления и моментов инерции
Обычно раб. машина приводится в движение двигателем ч/з редуктор. В этих условиях для облегчения практических расчетов момент инерции и момент сопротивления, возникающих в приводе, приводят к какой-либо оси, чаще всего это вал электродвигателя. Т.е. момент инерции и момент сопротивления пересчитывают к валу.
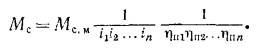
Приведение момента сопротивления к валу электродвигателя
Приведение производится на основе энергетического баланса или на основе равенства мощностей.

В одноступенчатом редукторе
![]()
![]()
![]()

Приведение момента инерции к валу электродвигателя
Производится на основе равенства кинетической энергии вращ. частей при действительном значении момента инерции на ступенях редуктора и при приведенном значении момента инерции

![]()
26. Приведение силы и массы при поступательном движении к моменту при вращательном движении
Такое приведение производят в том случае, если один из механизмов осуществляет поступательное движение, а остальные движущиеся части привода вращаются. Н-р, в приводах подъемных кранов, в подъемниках и т.д.

На основе баланса мощности
![]()
![]()

При приведении массы, движущейся поступательно, используется формула равенства запаса кинетической энергии

При приведении момента инерции к поступательному движению приведенная масса
![]()
27. Приведение поступательно движущихся масс и моментов при переменной скорости к вращательному движению.
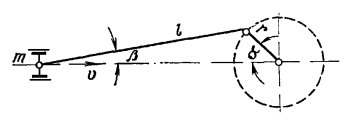
Скорость и ускорение поступательно движущихся масс изменяется по знаку и величине за 1 поворот кривошипа
![]()
![]()
![]()
![]() - статич. момент,
приведенный к скорости вращения вала
- статич. момент,
приведенный к скорости вращения вала
![]()
Уравнение движения кривошипного механизма
![]() -
наиболее общий вид уравнения движения
привода, т.к. учитывает изменение момента
инерции.
-
наиболее общий вид уравнения движения
привода, т.к. учитывает изменение момента
инерции.
28. Определение времени пуска, торможения и остановки электропривода
![]()

Если М=αМН, ω2= ωН, ω1=0, т.е. двигатель начинает движение из состояния покоя и время его пуска
![]()
При замедлении привода избыточный момент становится отрицательным
![]()
Время торможения привода


Время остановки эл.привода определяется при след. условиях: при отключении двигателя от сети, кот. работает со скоростью ω1= ωН, ω2=0, М=0
