

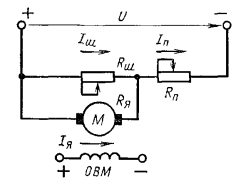
18. Регулирование скорости вращения дпт независимого возбуждения шунтированием якоря.
Применяется для приводов малой мощности и в более мощных для предварительного снижения скорости перед остановкой, что обеспечивает более точный технологич. процесс.
![]()
![]()
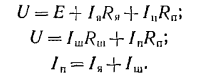
Подставим А и разделим на коэф. с.
![]() - уравн. электромех.
х-ки двигателя
- уравн. электромех.
х-ки двигателя
![]()
![]() -
уравн. мех. х-ки двигателя
-
уравн. мех. х-ки двигателя
При шунтировании якоря мех. х-ки линейны, они проходят ч/з точку ω0 т.к.
ω0= ωА
![]()
Физически ω0< ω из-за включения сопротивления RП в цепь якоря и, как следствие, к якорю подключается напряжение меньше сетевого.
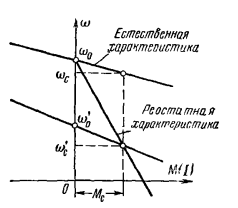
Жесткость мех. х-ки и угловая скорость идеального х.х. зависят от соотношения сопротивлений RП и RШ. Если изменить сопротивления этих резисторов, то можно получить другой наклон х-ки.
19. Регулирование скорости вращения дпт независимого возбуждения по системе генератор – двигатель

Якори генератора и двигателя соединены непосредственно без каких-либо добавочных сопротивлений. Управление осущ. в цепях возбуждения ген. и двигателя, что упрощает регулирование и позволяет получать большие пределы регулирования. Регулированием потока возбуждения двигателя можно получить диапазон регул. D= 2:1, а генератора D=6:1÷8:1. Таким образом общий предел регул. D=12:1÷16:1
![]() скоростная
х-ка
скоростная
х-ка
 -
мех. х-ка
-
мех. х-ка
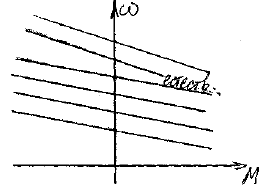
Мех. х-ки двигателя при неизменном потоке двигателя и изменении потока генератора ( без учета реакции якоря) представляют собой семейство линейных х-к, наклон кот. остается постоянным и опр-ся общим сопротивлением якорной цепи.
![]() -
скорость идеального х.х.
-
скорость идеального х.х.
При постоянном потоке двиг. работает как ген. и возвращает энергию от двиг. к ген. Ген. переходит к двиг-й режим, уменьшая нагрев ас. двигателя, и заставляет его отдавать энергию в сеть. Система Г-Д имеет 2 зоны регулирования – вверх и вниз от основной скорости.
Недостатки: 1) 2-хкратное преобразование эл.энергии в мех.(понижает КПД)
2) наличие 3-х машин в системе, суммарная установленная мощность кот. в 3 раза больше установленной мощности регулируемого двигателя
3) значительные габариты и масса установки
4) высокие эксплуатационные и капитальные расходы.
20. Система вентильный преобразователь – дпт

Скорость регул-ся изменением напряжений вентилей, что достигается изменением угла включения вентилей α с помощью фазорегулятора ФР.
![]() -
уравнение электромех. х-ки
-
уравнение электромех. х-ки
![]() уравнение
мех. х-ки
уравнение
мех. х-ки
![]() -
эквивалентное R
якорной цепи
-
эквивалентное R
якорной цепи


Мех. х-ки Вентильный преобразователь – ДПТ, чем в Г-Д имеют больший наклон, это объясняется тем, что в вентилях будет большего падения напряжения, т.к. в тр-ре главное влияние оказывает индуктивное падение напряжения, кроме того при переходе от малых нагрузок к х.х имеет место крутой подъем х-к. Это объясняется тем, что в выпрямителе наступает режим прерывистых токов. Чем глубже регулирование выпрямителя, т.е. чем выше угол регул. α, тем больше величина тока, при кот. начинается резкий подъем х-к.
21. Регулирование скорости вращения ДПТ последовательного возбуждения.
Регул-е подводимого напряжения (можно только уменьшать основную скорость, т.к. увеличение напряжения сверх нормы не допустимо). Х-ки с понижением напряжения падают менее круто в зоне норм. нагрузок. При этом велики потери в цепи якорей двигателей и регул-щего генератора.
Регул-е включением последовательного сопротивления в цепь якоря. Регул-е возможно вниз от основной скорости. С увеличением RП падает жесткость мех. х-ки, велики потери, поэтому этот способ не экономичен.

Включение сопротивления шунта в цепь якоря
Есть 2 схемы вкл-ния

Схема а) при малых нагрузках х-ки имеют малую жесткость, ассимпотически стремятся к оси ординат. Регул-е возможно вниз от основной скорости.
Схема б) х-ки получаются более жесткими. Регул-е возможно вниз от основной скорости. Обе схемы не экономичны
Регул-е шунтированием ОВ

Регул-е возможно вверх от основной скорости, т.к. значение RШ соизмеримо со значением сопротивления ОВ. Способ является экономичным. Чем RШ больше, тем мягче мех. х-ка