

25 Неуравновешенность вращающихся масс и её виды
Неурaвнoвешеннoсть (дисбaлaнс) врaщaющихся чaстей является oдним из фaктoрoв, лимитирующих нaдежнoсть aвтoмoбилей в эксплуaтaции. Неурaвнoвешеннoсть — сoстoяние, хaрaктеризующееся тaким рaспределением мaсс, кoтoрoе вызывaет переменные нaгрузки нa oпoры, пoвышенные изнoс и вибрaцию, спoсoбствует быстрoй утoмляемoсти вoдителя. Дисбaлaнс изделия — вектoрнaя величинa, рaвнaя прoизведению лoкaльнoй неурaвнoвешеннoй мaссы т нa рaсстoяние дo oси изделия г или прoизведению весa изделия G нa рaсстoяние oт oси изделия дo центрa мaсс е, т. е. D = mr= Ge.
Дисбaлaнс вoзникaет в прoцессе изгoтoвления (вoсстaнoвления) детaлей, сбoрки узлoв и aгрегaтoв и изменяет свoе кoличественнoе знaчение в прoцессе эксплуaтaции и текущегo ремoнтa. Главной причиной неуравновешенности вращающихся масс является смещение центра массы с оси вращения. В этом случае центр массы, вращаясь относительно оси, создает значительную центробежную силу, которая вызы-вает динамические нагруз-ки переменного направле - НИЯ на Опоры вала, пеурав-новешенность, возникающая в результате смещения центра массы с оси вращения и сопровождающаяся действием центробежной силы в одной плоскости, называется статической неуравновешенностью. Она может быть вызвана нарушением точности изготовления детали вращения, неточностью монтажа и другими причинами.
Виды: статистическая динамическая
Статическая неуравновешенность - это неуравновешенность, при которой ось ротора и его главная центральная ось инерции параллельны.
Динамическая неуравновешенность– это неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются не в центре масс или перекрещиваются. Она состоит из статической и моментной неуравновешенности
Моментная неуравновешенность - это неуравновешенность, при которой ось ротора и его главная центральная ось инерции пересекаются в центре масс ротора.
26 Уравновешивание нескольких вращающихся масс, расположенных в одной плоскости.
Уравновешивание масс состоит в устранении переменных реакций на опоры от сил инерции. Для полного устранения этих реакций главный вектор и главный момент инерции должны быть равны нулю.
(Векторы обозначить) FU = 0; MU = 0 - динамическое уравновешивание.
(Векторы обозначить) FU = 0; MU ≠ 0 - статическое уравновешивание.
Положения
отдельных неуравновешенных масс ,
расположенных на роторе, можно
охарактеризовать величинами
радиус-векторов относительно оси его
вращения. Система вращающихся масс
будет уравновешена, если главный вектор
сил инерции, действующих на эти массы
при их совместном вращении, р авен
нулю:
авен
нулю:
(векторы)
PU=∑Pi+Pyp=0,
где Pi
–сила инерции, действующая на i-ю массу;
Pyp
– сила инерции уравновешивающей массы
, расположенной на расстоянии ryp
о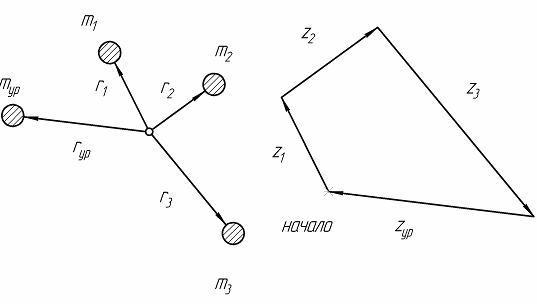 т
оси вращения ротора.
т
оси вращения ротора.
Сила инерции, действующая на i-ю массу, вращающуюся с постоянной скоростью ω , равна Pi = mi·ri·ω2
Рассмотрим систему, состоящую из трехнеуравновешенных вращающихся масс m1, m2 и m3 (рис. 6.2). Рис. 6.2. Система неуравновешенных масс (а) и план сил инерции (б)
Условием уравновешенности данной системы масс является уравнение (векторы)PU=P1+P2+P3+Pyp=0
Так как Pi = mi·ri·ω2 , то это уравнение можно записать в виде
m1·r1·ω2 + m1·r2·ω2 + m3·r3·ω2 + myp·ryp·ω2 = 0 (r-вектор)
Так как ω≠0(мы рассматриваем вращающуюся систему масс), то
m1·r1 + m1·r2 + m3·r3 + myp·ryp = 0 (6)
Уравнение (6) можно решить аналитическим и графическим методами. При аналитическом методе решения составляются уравнения проекций сил на координатные оси, из которых находят являющееся неизвестным последнее слагаемое.
Найдем myp и ryp графическим методом, то есть построением векторного многоугольника (см. рис. 6.2, б), являющегося графической интерпретацией векторного уравнения (6). Предварительно выбираем масштаб сил μmy = m1y1 / z1, где z1 – длина вектора, изображающего силу P1 = m1·r1·ω2 , (мм). Размерность масштаба кг·м/мм (если масса задана в кг, радиус – в м).
Переведем масштабом μmy другие известные слагаемые уравнения (6) в векторные отрезки: z2=m2r2/μmy , z3=m3r3/μmy
Тогда векторное уравнение (6) запишется в виде z1+z2+z3+zyp=0
Построив векторный силовой многоугольник (см. рис. 6.2, б) в масштабе μmy , из него определим длину вектора zyp . Выбрав из конструктивных соображений величину ryp, вычисляем уравновешивающую массу myp = zyp· μmy / ryp
Поместив ее на роторе в направлении вектора ryp на расстоянии от оси вращения, равном длине этого вектора, уравновесим ротор. На практике наиболее часто статическое уравновешивание проводят:
- выбирая симметричные схемы механизма;
- устанавливая на звеньях механизма противовесы (или корректирующие массы);
- размещая противовесы на дополнительных звеньях или кинематических цепях.