

4) Особенности и классификация управления электроприводов переменного тока
Системы управления электроприводов переменного тока строятся так же, как и система постоянного тока, по принципу “управляемый преобразователь-двигатель” с различными обратными связями, позволяющими непрерывно контролировать управляемые координаты
электропривода.
Управляемыми преобразователями в таких системах являются преобразователи переменного напряжения и преобразователи частоты (ПЧ). Простой маловентильный преобразователь переменного напряжения (ТПН) позволяет создать систему управления типа ТПН-АД, позволяющие регулировать скорость электропривода в небольших пределах, формировать требуемые статические и динамические характеристики и улучшать энергетические и технико-экономические показатели.
Использование в системах управления электроприводов переменного тока и преобразователей частоты позволяет создавать системы асинхронного или синхронного электроприводов: ПЧ-АД или ПЧ-СД, системы с двигателями двойного питания, обеспечивающие частотное управление скоростью и моментом электропривода. В качестве преобразователей частоты используются преобразователи частоты с непосредственной связью (НПЧ) и со звеном постоянного тока, с автономными инверторами напряжения (АИН) и тока (АИТ). Такие системы, построенные по принципу подчинённого регулирования координат с векторным и, в частности, частотно-токовом управлением, обеспечивают высокие диапазоны регулирования скорости в статических режимах и высокое быстродействие в динамических.
5) Суэп переменного тока с тиристорным преобразователем напряжения
Регулирование напряжения в ТПН осуществляется с помощью тиристоров с различным схемами их включения. Наибольшее распространение получили ТПН с использованием двух тиристоров включенных по встречно-параллельной схеме в каждой фазе с нулевым и без нулевого вывода при соединении обмоток статора в звезду или треугольник (рисунок 5.1 а, б, в). В такой схеме при условном направлении вращения вала двигателя “Вперёд” включаются тиристоры VS1-VS6, а при направлении “Назад” VS7-VS10. ТПН используются также и при динамическом торможении. Включение требуемых тиристоров VS производится системой импульсно-фазового управления (СИФУ), обеспечивающей подачу импульсов управления на требуемые тиристоры.
Анализ
работы ТПН затруднён, так как напряжение
на его выходе является функцией не
только угла управления α
то
и угла нагрузки ϕ
:
ϕ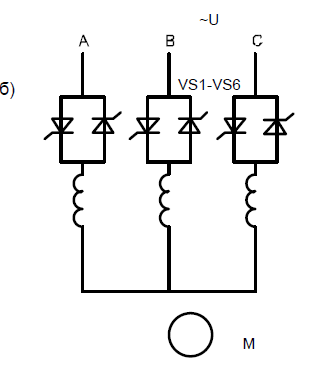 = arctg
= arctg
где Rэ, Xэ – эквивалентные активное и индуктивное сопротивления нагрузки согласно
схеме замещения фазы асинхронного двигателя:
– Схема включения тиристоров в электропривод с ТПН
6) Система управления асинхронным электроприводом ТПН-АД с суммирующим усилителем
Для регулирования скорости и получения жёстких механических характеристик необходима замкнутая система управления с обратной связью по скорости двигателя, сигнал которой обеспечивается тахогенератором (датчиком скорости). Также используются обратные связи по напряжению или току статора или ротора (для двигателя с фазным ротором). Расчёт параметров таких связей в системах управления с ТПН вызывает затруднения из-за несинусоидальной формы напряжения и тока.
Функциональная схема СУЭП с ТПН позволяющая получить жёсткие механические характеристики приведена на рисунке 5.5 а, а механические характеристики при заданномдиапазоне регулировании скорости двигателя max min D =ω ω приведены на рисунке 5.5 б.
Задание скорости осуществляется задающим напряжением UЗ , снимаемым с задатчика скорости RP. Сигнал обратной связи по скорости обеспечивается тахогенератором постоянного тока BR. Сигнал управления подаётся на усилитель А (характеристика которого приведена на рисунке 5.5 в). Выходное напряжение усилителя UУП ограничено стабилитроном V2, включённым на входе усилителя до значения UУП.MAX. Напряжение UУП
подаётся на СИФУ ТПН.
Стабилизация скорости двигателя при изменении его нагрузки в установившемся режиме работы осуществляется следующим образом. При малой нагрузке, когда Мс<Мс1 (рисунок 5.5 б), скорость двигателя близка к синхронной и разность UЗ-UС отрицательная. Диод V1 не пропускает ток управления, UУП=0 и угол управления тиристорами максимален αmax , выходное напряжение ТПН минимальное и скорость двигателя определяется
характеристикой при α1. При Мс=Мс1 и некоторой скорости ω1 станет Uc=UЗ1, а при дальнейшем снижении скорости диод V1 откроется, появится напряжение управления преобразователя и СИФУ будет постепенно снижать угол управления тиристоров, что приведёт к повышению напряжения на обмотке статора двигателя. Скорость двигателя при этом будет определяться промежуточными характеристиками при α2, α3, α4, α5 в точках 2, 3, 4, 5.
При дальнейшем повышении нагрузки и снижении скорости ниже ω5 разность UЗ1-UC ограничивается максимальной величиной, равной напряжению стабилизации стабилитрона V2, а соответствующее этому напряжение управления преобразователя UУП.MAX обеспечивает в СИФУ минимальный угол управления тиристорами αmin (рисунок 5.5 г).
ТПН подаёт полное напряжение на обмотку статора двигателя и дальнейшее снижение его скорости происходит по характеристике при α5.