

1) Классификация систем автоматического управления (суэп)
Системы управления различают по назначению: поддержания постоянства регулируемой переменной, системы программного управления и следящие системы. Эта классификация относится к замкнутым системам. Она не включает в себя простейших систем и не учитывает систем, обеспечивающих оптимизацию, самонастройку и
комплексную автоматизацию.
Системы управления различают по роду аппаратуры: релейно-контакторные, с электромашинными усилителями, с магнитными усилителями, с электронными и полупроводниковыми преобразователями. Это не всегда удобно, т.к. современные системы, имеющие аппаратуру, могут строиться по одинаковым принципам и будут меняться при переходе от одного класса систем к другому.
Наиболее целесообразно группировать СУЭП по тем основным функциям, которые они выполняют в производственном процессе. Группирование систем по основным функциям довольно сложно при изучении систем управления, то классификация их по основным функциям является более целесообразной и с методической точки зрения.
2)Рксуэп
Под термином «релейно-контакторные системы управления» (РКСУ) понимаются логические системы управления, построенные на релейно-контакторной элементной базе и осуществляющие автоматизацию работы двигателей. В задачу РКСУ входит автоматизация следующих операций: включение и отключение двигателя; выбор направления и скорости вращения; пуск и торможение двигателя; создание временных пауз в движении; защитное отключение двигателя и остановка механизма. Данные операции требуются для выполнения необходимого по технологическим условиям движения рабочего органа механизма.
Непосредственным объектом управления для РКСУ является двигатель, питаемый от сети. Электропривод, выполненный на такой основе, представляет собой простой нерегулируемый электропривод, в основном общепромышленного применения (например, электропривод кранов, тихоходных лифтов, конвейеров, компрессоров, вентиляторов, насосов, некоторых транспортных устройств и т.п.). При этом применяются двигатели асинхронные, синхронные, постоянного тока с последовательным и смешанным возбуждением. Двигатели с независимым возбуждением и другого типа (шаговые, вентильные, вентильно-индукторные) используются практически только в регулируемых электроприводах с питанием от управляемых преобразователей.
К достоинствам РКСУ следует отнести: наличие гальванической развязки цепей; значительную коммутационную мощность; высокую помехоустойчивость; возможность использования единого источника питания для силовых и управляющих цепей.
Недостатками РКСУ являются: контактная коммутация, требующая соответствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление.
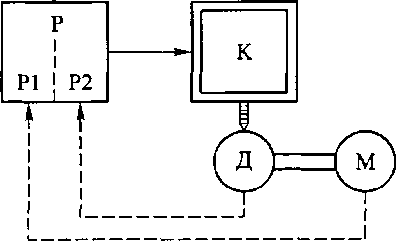
В составе РКСУ можно выделить по функциональному назначению две части: управляющую, формирующую алгоритм управления (реле — Р), и исполнительную, непосредственно осуществляющую управляющие воздействия на двигатель (контакторы — К).
Управляющую часть можно подразделить на две составляющие: Р1 — формирующую общие команды на движение механизма (М) согласно технологическому режиму его работы (верхний уровень управления), и Р2 — формирующую необходимое качество движения (нижний уровень управления). Функционально разделенные части Р1 и Р2 конструктивно могут быть как разделены, так и объединены в виде единого управляющего устройства, например, единой панели управления.
Через двигатели (Д) РКСУ управляют движением рабочего органа (РО) производственной установки с определенным технологическим назначением. В разных установках РКСУ выполняют различные технологические задачи — перемещение грузов, подачу воды, воздуха, смазки, повороты регулирующих вентилей и задвижек и т.п.
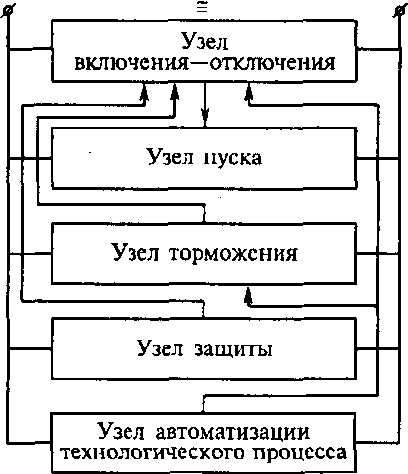
Последовательность работы узлов в составе РКСУ зависит от их электрических соединений, отражаемых в электрических схемах. Электрическая схема РКСУ является графической формой изображения РКСУ. На рис. приведена общая функциональная схема РКСУ. На ней изображен функциональный состав РКСУ в виде узлов и отмечена их взаимосвязь.
Наиболее полную информацию о системе управления дает так называемая принципиальная схема. В ней приводятся все элементы системы управления, изображенные и обозначенные в соответствии со стандартом, отображены все электрические соединения элементов. Допускается изображение какого-либо узла без раскрытия его внутреннего содержания, т. е. с показом только его электрических входов и выходов для соединения с другими узлами и источниками питания. При этом указываются наименование типового узла и источник информации о нем. Если узел не стандартный, то его схема должна быть дополнительно приведена как приложение к принципиальной схеме. Схема не дает пространственного расположения аппаратуры, по ней затруднительно выполнить монтаж электрических соединений аппаратов. Поэтому дополнительно к принципиальной схеме в проектной документации дается схема электрических соединений с изображением аппаратов в собранном виде и соединяющих их электропроводов.
Оценить работоспособность и качество разработанной РКСУ можно на основе ее анализа, т.е. на основе той или иной формы ее описания. Исходным материалом для анализа являются технологическое назначение РКСУ, указанные выше схемы и приложенная к ним спецификация аппаратуры. Анализ может быть общим и детальным.
В общем анализе дается характеристика РКСУ в целом: указываются назначение системы, тип элементной базы, выделяются основные узлы и отмечаются принципы, на которых они построены. Способ описания — словесный.
В детальном анализе дается подробное описание функционирования всей РКСУ или ее отдельных узлов. По существу в данном анализе описывается алгоритм логической системы управления, построенной на релейно-контакторной элементной базе.
Алгоритм может быть представлен как словесно, так и формализованно — символическим, аналитическим и графическим способами.
Для символического описания РКСУ предварительно вводятся символы, обозначающие соответствующие воздействия в аппаратуре.
Наиболее строгой и компактной формализацией описания РКСУ является аналитический способ, выраженный в структурных формулах булевой алгебры логики с использованием операций конъюнкции, дизъюнкции, инверсии (отрицания).
Для детального анализа РКСУ более наглядным оказывается графический способ описания в форме графа или циклограммы. Применительно к электроприводу технологической задачей РКСУ является автоматизация некоторого циклического во времени (длительного или кратковременного) движения рабочего органа. Графический способ описания функционирования РКСУ в форме циклограммы оказывается наиболее простым и наглядным.
Циклограмма представляет собой графическое изображение последовательности состояний РКСУ на цикловом интервале времени ее функционирования. Циклограмма состоит из следующих элементов:
такт — интервал времени, на котором состояние системы управления сохраняется. Устойчивый такт может продолжаться сколь угодно долго, а неустойчивый такт — это кратковременный интервал перехода системы управления из одного состояния в другое;
период включения — интервал времени включенного состояния аппарата (логическая единица его переменной), изображаемый горизонтальной прямой в строке;
период отключения — интервал времени отключенного состояния аппарата (логический ноль его переменной), изображаемый отсутствием горизонтальной прямой в строке;
воздействие одного аппарата на другой — причина изменения состояния аппарата, изображается тонкой вертикальной прямой, направленной от начала или конца периода включения одной переменной к началу включающего или отключающего такта другой переменной.