

Микропроцессорное управление Электроприводом постоянного тока.
В ЭП постоянного тока микропроцессорные системы используются в основном для стабилизации скорости и отработки заданного перемещения.
Цифровое регулирование скорости осуществляется 2мя путями:
аналогоцифровым управлением, в который регулятор тока аналогового типа, а регулятор скорости с применением микроЭВМ
прямое цифровое управление, в котором на микропроцессорные средства возлагаются функции контроля и управления работой технологического агрегата.
Функциональная схема ЭП с микропроцессорным управлением с цифровым регулятором скорости.
Схема
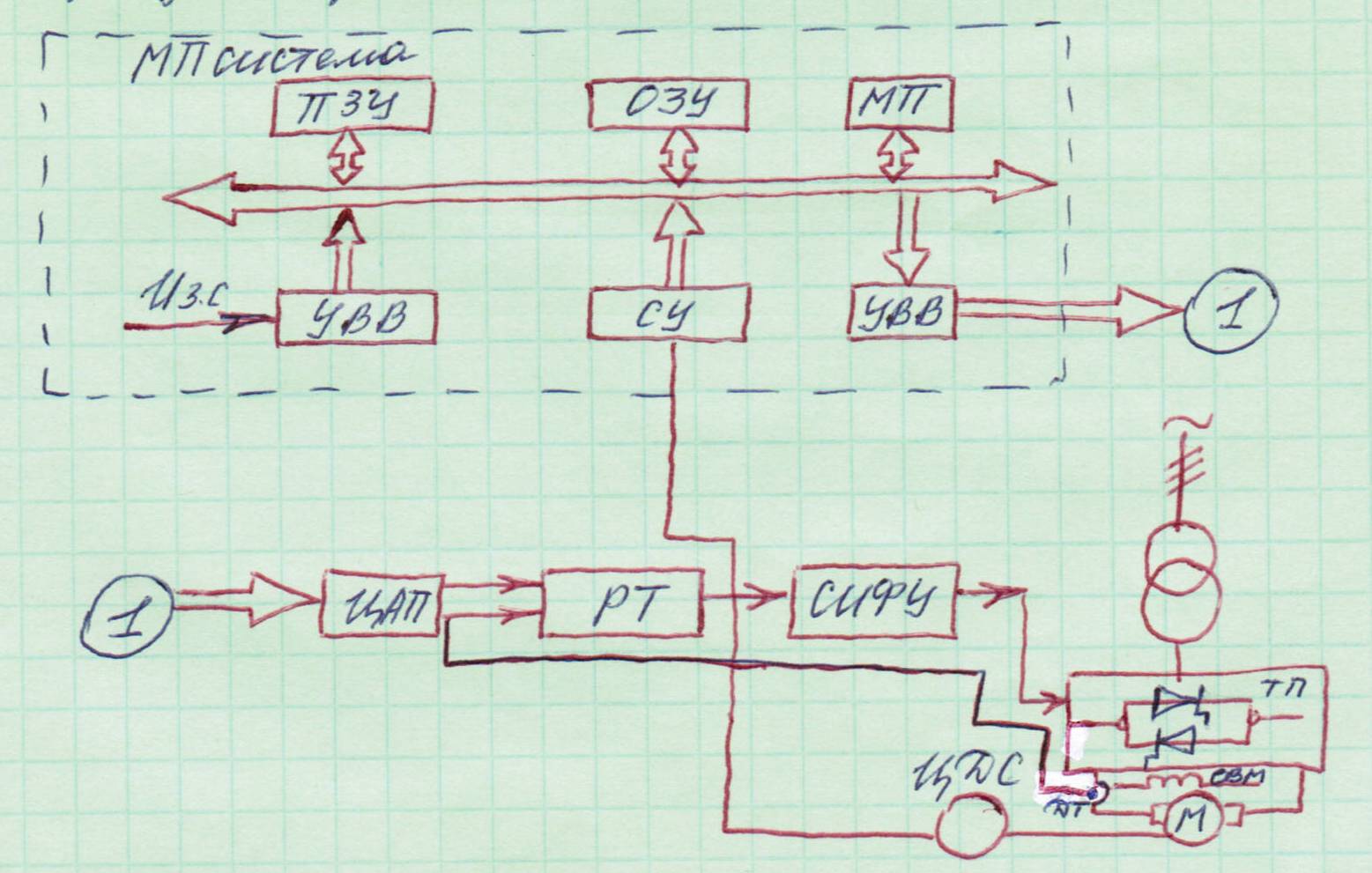
ЭП с микропроцессорным управлением с цифровым регулятором скорости содержит микропроцессорную структуру, ЦАП, СИФУ, РТ, аналоговый датчик тока ДТ, ЦДС. Микропроцессорная структура позволяет программным путем реализовать различные структуры регуляторов, в том числе П, ПЧ, ПИД с переменными коэффициентами для пропорциональной (П), интегральной (И), дифференциальной (Д), апериодической (А) составляющих выходного параметра.
Регулятор представляет собой некоторое управляющее устройство, построенное по схеме 4хполюсника на операционном усилителе. Выход операционного усилителя соединяется со входом через РС функцию. Таким образом достигается характерное управляющее воздействие на входную величину регулятора. Простейшие законы движения И.О. могут быть описаны простейшими регуляторами П и И, более сложные законы движения П, ПД. Программным путем легко обеспечивается задание различных законов управления с высокой точностью регулирования, а также предусматривается адаптация параметров регулятора в случае изменения магнитного потока Двигателя или других параметров системы. Такие системы обеспечивают задание скорости вращения до 1 оборота в минуту и высокую статическую точность от 0,1 до 0,001%, а также стабилизацию скорости с высокими динамическими свойствами.
Функциональная схема ЭП с прямым цифровым управлением скоростью от ЭВМ.
Схема
Система с прямым цифровым управлением предусматривает управление ЭП-ом от ЭВМ, включая организацию формирования управляющих импульсов на силовые электронные ключи ТП. В схеме можно выделить основные узлы: генератор импульсов ГИ, устройство синхронизации, датчики полного (постоянного) и прерывистого токов и др.
ГИ может быть реализован как программным, так и аппаратным способом. В ЭВМ вводится программа регулирования скорости вращения с помощью ПИ регулятора, и программа регулирования тока, учитывающая изменение направления протекания тока при логических переключениях преобразователя. Программы позволяют регулировать скорость каждые 10милли секунд, а ток каждую миллисекунду.
Системы ЭП постоянного тока с микропроцессорным регулированием используют алгоритмы управления, основанные на принципе подчиненного регулирования. Регулирование скорости вращения реализуется программно с помощью ПИ или ПИД регуляторов.
Регулирование тока в непрерывном режиме осуществляется ПИ регулятором, а в режиме прерывистого тока методом нелинейной коррекции функции тока якоря или функции полного тока питающей сети.
Функциональная схема цифро-аналоговой системы позиционного ЭП с цифровым управлением положения от ЭВМ.
Схема
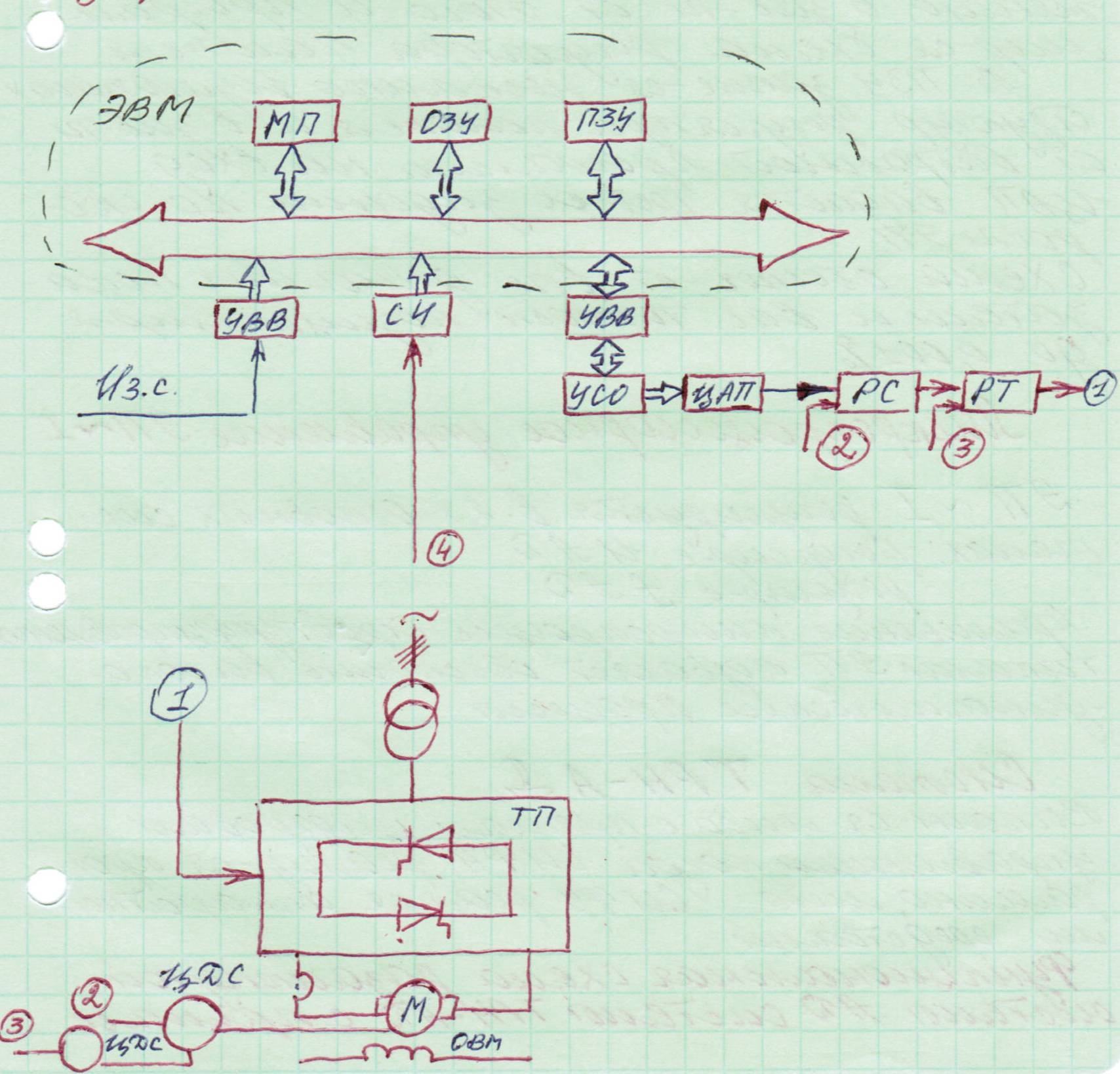
Позиционный ЭП использует цифроаналоговое управление тиристорным преобразователем. Схема содержит аналоговую часть, состоящую из регуляторов РС, РТ и цифровую, выполненную на ЭВМ. Связь цифровой и аналоговой частей осуществляется устройством связи с объектом УСО, ЦАП и СЧ. В МП системе осуществляется сравнение заданного положения с действительным, контроль текущего значения положения и вычисления сигнала рассогласования по положению, в зависимости от этого и программируется схема регулятора положения. В ПЗУ записывается несколько возможных структур регулятора положения и в зависимости от выбранной программы на вход ЦАП выдается требуемое задание по скорости ЭП. Схема обеспечивает высокие динамические показатели и высокую точность позиционирования до 0,001%