

Завантаження і розвантаження ковшів
Робочий процес ковшового транспортера складається з трьох етапів: 1) заповнення вантажем; 2) транспортування; 3) розвантаження. Ковшові елеватори класифікують за способом наповнення і розвантаження ковшів, типу ковшів і їх розташуванню на тяговому елементі. Від особливостей процесів наповнення ковшів залежать їх форма, розташування на тяговому органі і швидкість руху.
Завантаження ковшів проводиться зачерпуванням вантажу з нижньої частини кожуха або засипанням вантажу в ковші, розвантаження в залежності від швидкості елеватора буває відцентрове, самопливне, комбіноване, спрямованої (рис. 4.6).
Розрізняють 4 типи завантаження ковшів: а) зачерпуванням з відкритої купи – при транспортування легкосипких вантажів та при використанні у нижній частині башмака грат, що запобігають пошкодженню ковшів; б) зачерпуванням з башмака – ковші пересувають вантаж по заокругленому дну, внаслідок чого збільшується ступінь їх заповнення; в) наповнення ковшів на шляху їх прямолінійного руху – при умові усунення попадання вантажу в башмак шляхом встановлення спеціального завантажувального пристрою або гострокутних ковшів; г) зачерпуванням вантажу з башмака з наступним довантаженням на шляху їх прямолінійного руху.
Наповнення ковшів зачерпуванням характерно для високошвидкісних стрічкових і ланцюгових елеваторів з розставленими ковшами і застосовується для дрібно- і середньошматкових малоабразивних матеріалів, при зачерпуванні яких при підвищеній швидкості не виникає значних опорів.
Безпосереднє засипання в ковші застосовується для великошматкових абразивних вантажів через можливість відриву ковшів і великих опорів руху. Безпосереднє завантаження з завантажувального башмака в ковші характерно для середньошвидкісних і тихохідних елеваторів з зімкнутим розташуванням ковшів.
Відцентрова розвантаження характерна для швидкохідних елеваторів (1-5 м/с) з розставленими ковшами для транспортування легкосипких вантажів. Вільне самопливне (гравітаційне) розвантаження застосовується для погано сипких або вологих вантажів у тихохідних елеваторів при швидкості руху ковшів 0,4-0,8 м/с. Вільне спрямоване (змішана) розвантаження використовується для похилих і вертикальних тихохідних елеваторів (стрічкових і ланцюгових) з зімкнутими ковшами для транспортування кускових, абразивних або крихких вантажів.
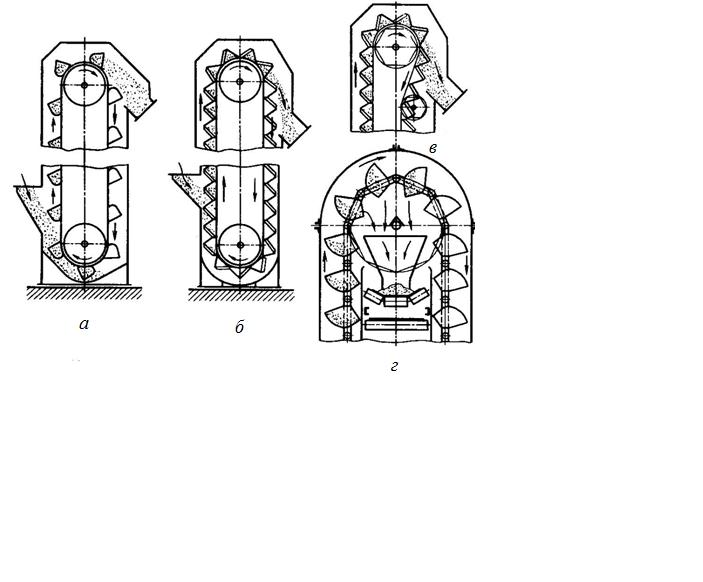
Рис. 4.6. Схеми завантаження і розвантаження ковшових елеваторів:
а - завантаження зачерпиванія, розвантаження під дією відцентрової сили; б - завантаження засипанням в ковші, розвантаження самопливна спрямована; в - самопливна вільне вивантаження; г - центральна розвантаження
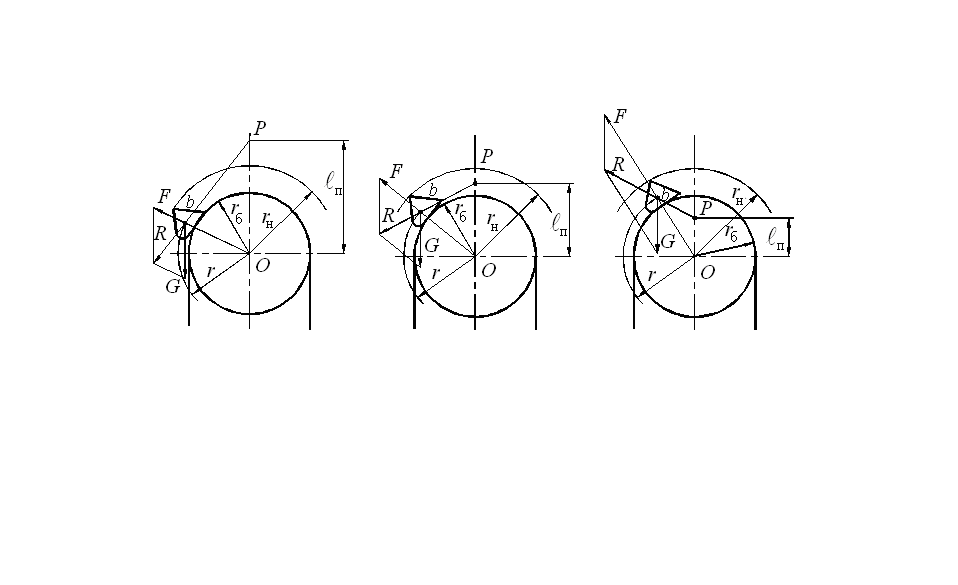
Полюсна відстань. Якщо ківш рухається навколо барабана, то на вантаж, крім сили тяжіння діє відцентрова сила:
 ,
,
де
 – кутова швидкість обертання приводного
вала; m
– маса вантажу в ковші; r
– радіус обертання маси вантажу.
– кутова швидкість обертання приводного
вала; m
– маса вантажу в ковші; r
– радіус обертання маси вантажу.
Якщо звести вектори сили тяжіння і відцентрової сили на вертикалі, що проходить через центр барабана, то вони перетнуться в точці В, що називається полюсом. Відстань l від полюса до центра барабана називається полюсною відстанню.
 м,
м,
де n – число обертів приводного барабана за хвилину.
З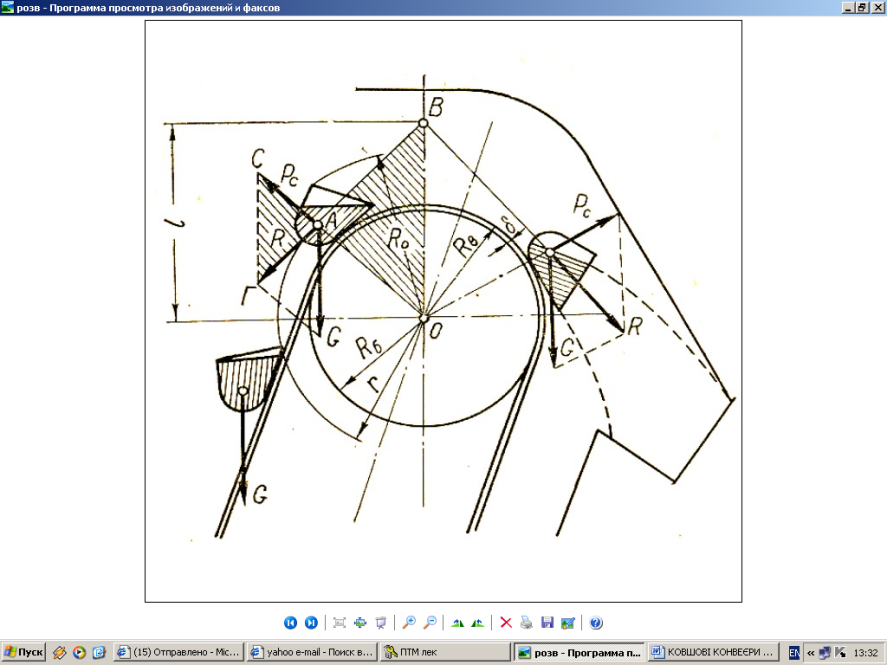 алежно
від величини полюсної відстані розрізняють
три режими розвантаження ковшів:
відцентрове
– характеризується малою величиною
полюсної відстані l≤Rв
(Rв
–
радіус кола, дотичного до внутрішньої
стінки ковша). Рекомендується, щоб
l=(0,9…1)Rв;
відцентрово-самопливне
– розвантаження відбувається при Rв
≤ l ≤ R0
(R0
–
радіус кола, що проходить через зовнішні
ребра ковшів); самопливне
– при l
≥ R0
,
поділяється на вільне та напрямлене.
Отже, режим розвантаження ковшів залежить
від числа обертів приводного барабана
та його діаметра. Форма головки
транспортера не повинні сприяти
подрібненню вантажу і висипанню його
в кожух. Для нормальної роботи ковшового
транспортера необхідно задатись
правильною формою і розмірами ковшів,
швидкістю руху тягового органу, розмірами
барабанів (зірочок) та розмірами головки
і башмака.
алежно
від величини полюсної відстані розрізняють
три режими розвантаження ковшів:
відцентрове
– характеризується малою величиною
полюсної відстані l≤Rв
(Rв
–
радіус кола, дотичного до внутрішньої
стінки ковша). Рекомендується, щоб
l=(0,9…1)Rв;
відцентрово-самопливне
– розвантаження відбувається при Rв
≤ l ≤ R0
(R0
–
радіус кола, що проходить через зовнішні
ребра ковшів); самопливне
– при l
≥ R0
,
поділяється на вільне та напрямлене.
Отже, режим розвантаження ковшів залежить
від числа обертів приводного барабана
та його діаметра. Форма головки
транспортера не повинні сприяти
подрібненню вантажу і висипанню його
в кожух. Для нормальної роботи ковшового
транспортера необхідно задатись
правильною формою і розмірами ковшів,
швидкістю руху тягового органу, розмірами
барабанів (зірочок) та розмірами головки
і башмака.
Рис. 4.7. Схема сил
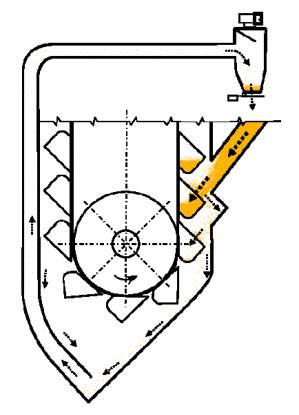
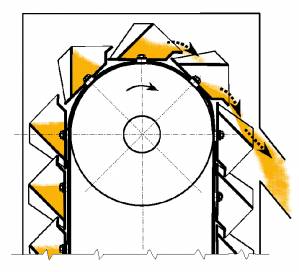
Рис. 4.8. Завантаження і розвантаження ковшів
 а
б
в
а
б
в
Рис. 4.9. Схема сил, діючих при самопливної (а), змішаної (б), відцентрової (в) розвантаження
Геометрія руху потоку вантажу на розвантаженні дозволяє конструктивно визначити контури головки кожуха і крок ковшів на тяговому органі для забезпечення рівномірного потоку розвантажувати вантаж без ударів частинок об стінки кожуха, кришення і пилення.
Норії - спеціальні ковшові елеватори для вертикального транспортування зерна і борошна на борошномельних і комбікормових підприємствах і зерносховищах, які мають специфічні конструктивні особливості, їх основні параметри обумовлені ГОСТ 10190-70.
Люлькові і полицеві елеватори
К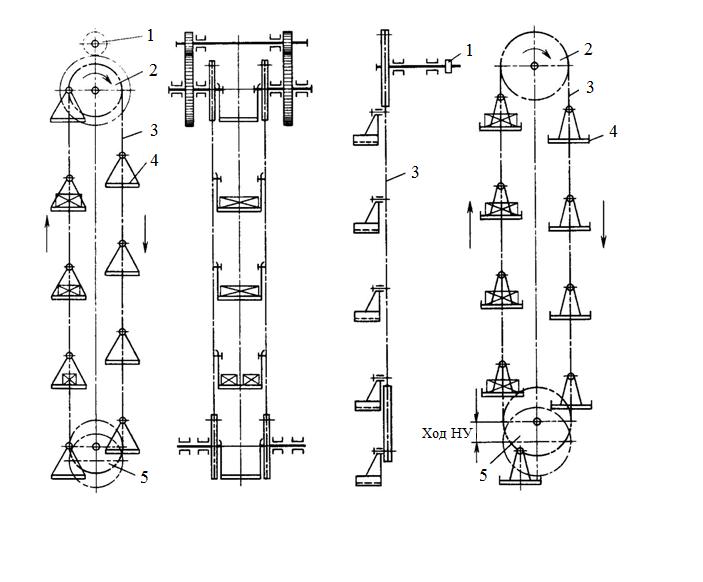 олискові
(рис 4.10) і полицеві (рис. 4.411) елеватори
призначені для переміщення штучних
вантажів і виконуються вертикальними
і похилими [1].
олискові
(рис 4.10) і полицеві (рис. 4.411) елеватори
призначені для переміщення штучних
вантажів і виконуються вертикальними
і похилими [1].
Рис. 4.10. Схема колискового елеватора (одноланцюговий і дволанцюговий): 1 - привід; 2 - привідні зірочки; 3 - тягові ланцюги; 4 - люльки; 5 - натяжні зірочки
Люлькові елеватори виконуються двох- і одно ланцюговими (з консольним розташуванням люльок). Поличні елеватори мають жорстко закріплені консольні полиці-захвати, які виконують у вигляді кронштейнів із зігнутою або плоскою формою опорної поверхні. Завантаження та розвантаження поличних і люлбкових елеваторів проводиться автоматично або вручну.
Тяговим елементом люлькових елеваторів є пластинчасті, втулкові і каткові ланцюги, які переміщаються зі швидкістю 0,2-0,3 м/с. Люльки закріплені шарнірно і виконуються двухпальцевими(в двоколових конвеєрах) і однопальцевими (в одноланцюгових конвеєрах). Для усунення розгойдування колисок в поперечному напрямку ланцюги забезпечені ходовими роликами і направляючими шинами.
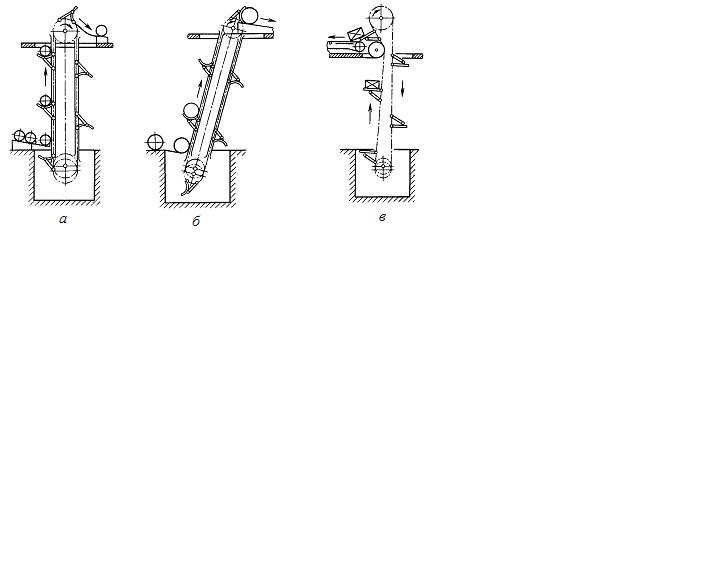 Рис.
4.11. Схеми поличних елеваторів: а -
вертикальний; б -
похилий; в -
вертикальний з відхиленням захоплення
на робочій гілки
Рис.
4.11. Схеми поличних елеваторів: а -
вертикальний; б -
похилий; в -
вертикальний з відхиленням захоплення
на робочій гілки
Поличний елеватор складається з двох вертикально замкнутих ланцюгів (пластинчастих, втулкових або коткових), що огинають верхні і нижні зірочки. До ланцюгах жорстко прикріплені консольні захвати-полки, форма яких залежить від геометричної форми переміщуваних вантажів. Поличні елеватори мають швидкості руху 0,2-0,3м/с.
Способи завантаження і розвантаження люлькових і полицевих елеваторів
Завантаження люлькових елеваторів виробляється на висхідній гілки, розвантаження - в будь-якому місці низхідної гілки. Ручне завантаження проводиться безпосередньо установкою вантажів на рухомі люльки і розвантаження забезпечується направляючими, стабілізуючими положення люльки в зоні завантаження.
Для автоматичного завантаження та розвантаження колисок застосовуються висувні та поворотні колосникові і роликові столи. Завантаження та розвантаження поличних елеваторів проводиться автоматично або вручну. Найбільш зручними для автоматизації завантаження і розвантаження є вантажі циліндричної форми, тому що їх можна перекочувати по похилому настилу або перевантажувати з колосникового столу на гребінчастого полку, а потім на стіл.
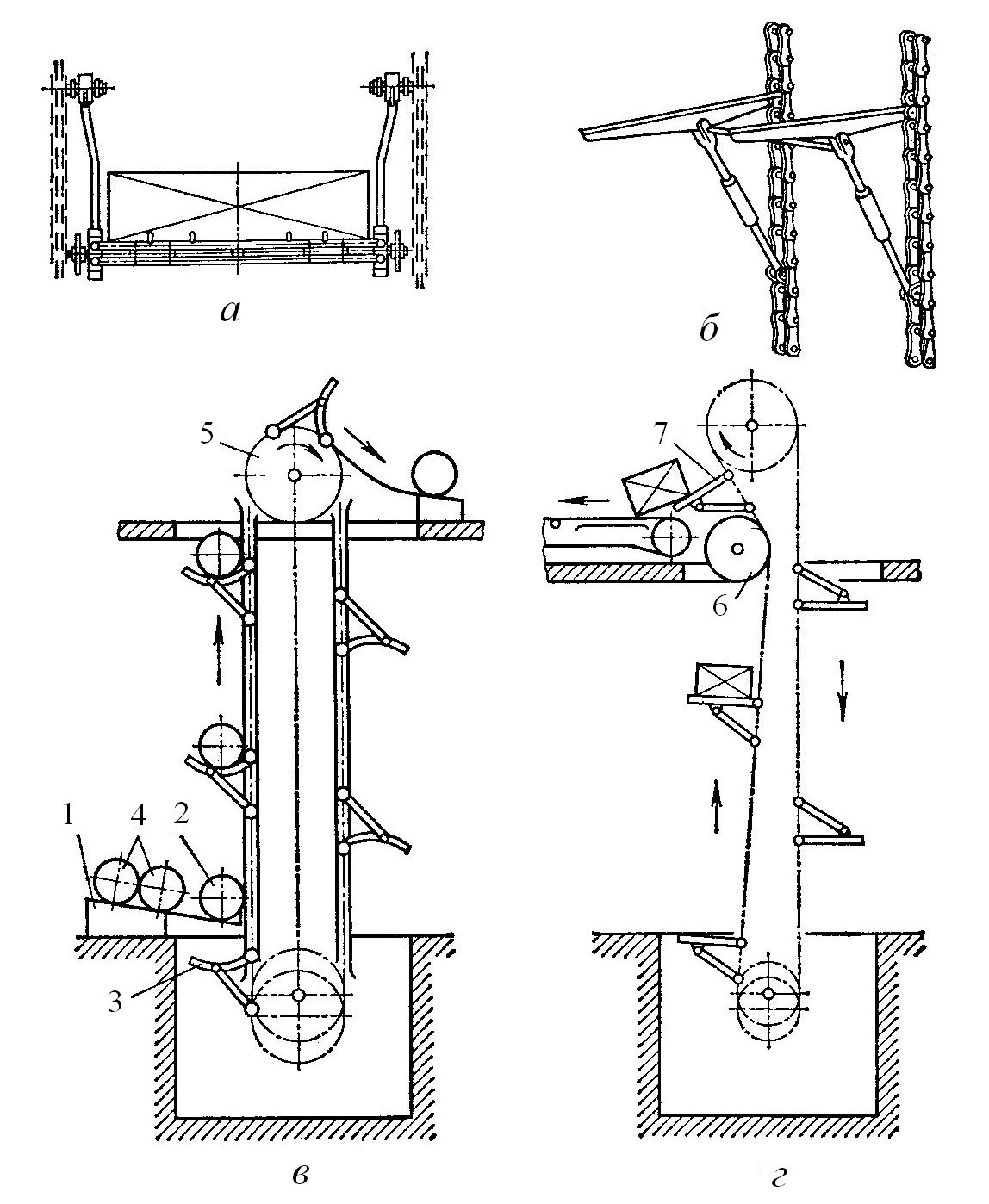 Рис.
4.12. Конструкція люльки (а) і
полки (б); схеми (в,
г) завантаження
і розвантаження поличних елеваторів: 1
- скати; 2, 4 - бочки; 3 - захват; 5 - головний
зірочка; 6 - відхиляюча зірочка; 7 –
полиця
Рис.
4.12. Конструкція люльки (а) і
полки (б); схеми (в,
г) завантаження
і розвантаження поличних елеваторів: 1
- скати; 2, 4 - бочки; 3 - захват; 5 - головний
зірочка; 6 - відхиляюча зірочка; 7 –
полиця
Використовується розвантаження на висхідній гілки (рис. 4.12, г) шляхом відхилення полиці за допомогою додаткових відхиляючих зірочок. Захвати-полки можуть забезпечуватися спеціальним поворотним пристосуванням, що дозволяє розвантажувати вантаж в будь-якому місці на висхідній гілки елеватора і керованим за допомогою упорів чи направляючих шин, висунутих в місці розвантаження. Поворотні частини захоплень після розвантаження повертаються у вихідне положення за допомогою пружин або направляючих шин.
Розрахунок ковшевих транспортерів
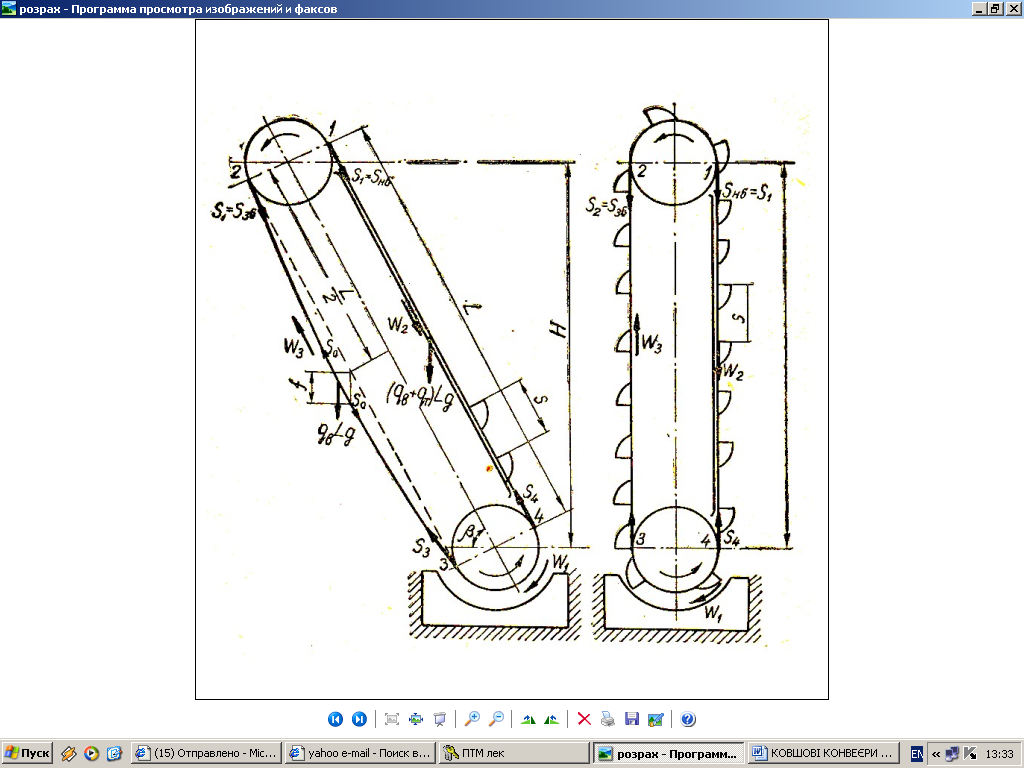
Рис. 4.13. Розрахункова схема
Продуктивність:
 кг/с,
кг/с,
де і – місткість ковша, м3; ψ – коефіцієнт заповнення ковшів; s – крок ковшів.
Крок: (підбирають за табл.)
 ,
м
,
м
Визначення сил опору руху тягового органу:
при зачерпуванні:

опір
зачерпуванню
 ,
Н; де
,
Н; де
 – потомий опір заглибленню ковша, Н/м;
В0=b+A,
м – довжина ребра ковша, що заглиблюється
у вантаж. сила інерції
– потомий опір заглибленню ковша, Н/м;
В0=b+A,
м – довжина ребра ковша, що заглиблюється
у вантаж. сила інерції
 ,
Н; де m
–
маса вантажу, що знаходиться в ковші;
,
Н; де m
–
маса вантажу, що знаходиться в ковші;
 - швидкість вантажу від кінцевого до
початкового значення по відношенню до
швидкості тягового органу; h1
– висота зовнішнього ребра ковша, м.
- швидкість вантажу від кінцевого до
початкового значення по відношенню до
швидкості тягового органу; h1
– висота зовнішнього ребра ковша, м.
на прямолінійних відрізках (для крутопохилого транспортера):
,
.
Тут
 – коефіцієнт опору руху тягового органу
з ковшами; qT
– погонна маса тягового органу з ковшами.
– коефіцієнт опору руху тягового органу
з ковшами; qT
– погонна маса тягового органу з ковшами.
При проектуванні крутопохилих стрічкових транспортерів усі розрахунки проводять як і для плоскострічкових пологопохилих транспортерів з холостою віткою, що провисає, а для крутопохилих ковшових транспортерів, як для ланцюгових транспортерів з рухомим настилом і холостою віткою, що провисає. Вертикальні ковшові транспортери розраховуються за тими ж рівняннями, лише кут β=900.
для похилих:
 ;
;
 ,
Н.
,
Н.для вертикальних:
 ;
;
 ,
Н.
,
Н.
При проектуванні роблять перевірку передачі рухомої сили за рахунок тертя зчеплення з приводним барабаном:
 ,
де е=2,72
– основа натуральних логарифмів; α –
кут обхвату стрічкою приводного барабана,
рад; f – коефіцієнт тертя зчеплення
стрічки з приводним барабаном.
,
де е=2,72
– основа натуральних логарифмів; α –
кут обхвату стрічкою приводного барабана,
рад; f – коефіцієнт тертя зчеплення
стрічки з приводним барабаном.
Для проектування зупинника необхідно визначити силу тяги робочого органу при зворотному русі стрічки, та крутний момент зворотного ходу на приводному валу транспортера:
 ,
Н;
,
Н;
 ,
Нм.
,
Нм.
Приклад розрахунку ковшевого елеватора
Продуктивність ковшового елеватора можна визначити за наступною формулою:

де і – ємкість ковша в л, яка вибирається по табл. 29 і 30;
S – крок кріплення ковшем до тягового органу в м;
Ψ – коефіцієнт наповнення ковша, який приймається по табл.. 33.
Якщо задана продуктивність елеватора, то ємкість ковша і крок ковшів можуть бути визначені послідовним підбором їх за наступним рівнянням:
 ,
,
Тип ємкості ковша вибирають попередньо (вибирають її по таблицям стандартів). При виборі ковшів і відстані між ними необхідно врахувати наступне:
при відцентровому розвантажуванні (при h0<rб) ковши вибирають з напівзаукругленим дном. Відстань S повинна бути не менше h (h- висота задньої стінки ковша);
для елеваторів, у яких полюсна відстань h0 знаходиться в межах від rа до rб, вибирають глибокі ковші і при такій ємкості, щоб крок ковша, який визначається з рівняння (219), був S≥2h;
при вільному самопливному розвантажуванні для сипучих вантажів використовують глибокі ковші, а для вантажів, що відлежуються – мілкі. При h0=1,5 rб крок ковшів S≥2h; при h0=(1,5÷3)rб крок ковшів S≥(3÷4)h.
Для ланцюгових елеваторів крок ковшів повинен бути кратним кроку ланцюга.
Після вибору ємкості ковша і кроку розташування ковшів слід знайти кути, які характеризують початок і кінець викидання вантажу, побудувати траєкторії польоту вантажу, перевірити степінь заповнення ковшів, вибрати конфігурацію головки і знайти місце розташування вивантажуючого патрубка.
Визначимо опір руху тягового органу. У випадку наповнення ковшів на ділянці їх прямолінійного руху робота витрачається на поглинання кінетичної енергії вантажу, що поступає в ковші зі швидкістю v0 і на надання вантажу швидкості руху ковшів v. В даному випадку можна записати наступне рівняння:
 (220)
(220)
де m – маса вантажу, яка переміщається елеватором за секунду;
W1 – опір завантаження в кГ;
v – швидкість тягового органу в м/сек;
Q – продуктивність в т/ч;
v 0 – швидкість завантаження (спрямована в сторону, що обернена руху).
При v0=0 миттєве зростання сили викликає той же ефект, що і подвійна величина статично прикладеного зусилля, а тому робота, яка витрачається на подолання сил інерції, буде вдвічі більше.
 (221)
(221)
З цієї формули знайдемо опір завантаження:
 (222)
(222)
де
 – погонна маса вантажу, що переміщається
в кг/м;
– погонна маса вантажу, що переміщається
в кг/м;
 – питома
робота опору заповнення ковша в кг/м.
– питома
робота опору заповнення ковша в кг/м.
У випадку зачерпування вантажу із кучі або з башмака (фіг.109,а) питома робота опору зачерпування Аs залежить від конструкції башмака і ковша, характеру вантажу, що переміщається від швидкості переміщення ковшів. Потужність при зачерпуванні вантажу витрачається на:
1) удар ковшів по лежачому вантажу, що не рухається;
2) на подолання сил інерції при наданні вантажу швидкості;
3) на подолання тертя зовнішніх стінок ковша по вантажу.
При
малих швидкостях тягового органу втрати
на удар і на подолання сил інерції малі,
тоді як втрати на тертя більші в зв’язку
з тим, що тертя по своєму характеру
наближається до тертя спокою. Повних
даних для визначення питомої роботи
опору зачерпуванню Аs
поки ще нема. Опір зачерпування вантажу
з кучі або башмака визначається по
формулі (222):
 .
Значення питомого опору зачерпування
вантажу слід вибрати по табл.34 або по
емпіричній формулі
.
Значення питомого опору зачерпування
вантажу слід вибрати по табл.34 або по
емпіричній формулі
 .
.
Таблиця 4.2. Значення питомого опору зачерпування вантажу Аs
Вантаж, що переміщається |
Швидкість руху тягового органу v в м/сек |
||||
0,5 |
0,75 |
1,0 |
1,25 |
1,5 |
|
Зерно………… Корене- плоди…….. Кускове вугілля………. |
- 0,75-1,0
- |
0,95-2,4 1,1-2,0
2,2-2,7 |
1,0-2,6 2,0-3,0
2,7-3,3 |
1,3-3,2 -
4,4-6,0 |
2,1-4,4 -
- |
В попередніх розрахунках краще приймати з таблиці більше значення Аs.
Опір руху тягового органу вертикального ковшового елеватора визначається за наступним рівнянням:
 ,
,
де H – висота транспортування вантажу в м;
с0 – коефіцієнт, що враховує опір жорсткості тягового органу через його згин внаслідок консольного прикладання навантаження, с0=1,25÷1,30.
Сила, що рухає тяговий орган, дорівнює сумі всіх опорів:
 ,
,
де с1, с2 - коефіцієнти, що враховують опір, що виникає при обертанні барабанів (зірочок), а також опір жорсткості тягового органу при його згинанні, кожен з цих коефіцієнтів приймається: для стрічкових елеваторів 1,05-1,1; для ланцюгових 1,1-1,2 (менше значення для барабанів і зірочок, змонтованих на підшипниках кочення).
Визначення опору переміщення тягового органу на прямолінійних ділянках ковшових елеваторів, що нахилені, у яких холоста гілка вільно провисає, а робоча опирається на спрямовані (фіг. 109,б), виконується по наступній формулі:
 ,
,
де L – довжина транспортування вантажу в м;
ws – коефіцієнт опору переміщення тягового органу, що приймається для стрічкових елеваторів так же, як і для стрічкових конвеєрів, а для ланцюгових елеваторів так же, як і для ланцюгових елеваторів;
qТ - погонна маса тягового органу в кГ/м.
Значення погонної маси тягового органу можуть бути для попереднього розрахунку визначені за наступною емпіричною залежністю:
 кГ/м;
кГ/м;
де Q – продуктивність елеватора в т/ч;
 – коефіцієнт,
що враховує тип тягового органу і
різновид ковша (приймається по табл.35).
– коефіцієнт,
що враховує тип тягового органу і
різновид ковша (приймається по табл.35).
Таблиця 4.3. Значення коефіцієнта
Продукти-вність, Q, в т/ч |
Об’ємна маса вантажу, що транспор-тується, γ, т/м3 |
Стрічкові елеватори |
Ланцюгові елеватори |
|||||
Ковші мілкі та глибокі |
Ковші остро-кутні |
Одноланцюгові |
Дволанцюгові |
|||||
Ковші мілкі та глибокі |
Ковші Гост-ро-кутні |
Ковші мілкі та глибокі |
Ковші гостро-кутні |
|||||
10-25 |
0,8 1,6 |
0,53 0,38 |
- - |
0,85 0,60 |
1,2 0,85 |
1,3 0,9 |
- - |
|
25-50 |
0,8 1,6 |
0,48 0,36 |
0,65 0,42 |
0,65 0,50 |
0,9 0,6 |
1,1 0,7 |
- - |
|
50-100 |
0,8 1,6 |
0,42 0,33 |
0,62 0,38 |
0,53 0,45 |
0,75 0,45 |
0,8 0,5 |
1,2 0,75 |
|
Більше |
0,8 1,6 |
0,36 0,28 |
0,60 0,35 |
- - |
- - |
0,6 0,4 |
1,0 0,65 |
|
Натяг на гілках тягового органу вертикальних ковшових елеваторів визначається так:
у збігаючій з приводного барабана (зірочки) гілки (фіг.109,б).
 ,
,
де 1,15 – коефіцієнт запасу натягу;
в набігаючій на приводний барабан (зірочку) гілки
 ,
,
де Р0 – сила, що рухається, визначається з рівняння.
В стрічкових елеваторах натягу в гілках тягового органу Sнб і Sсб повинні забезпечити передачу сили тяги за рахунок щеплення стрічки з приводним барабаном. Це повинно бути перевірено по формулі Ейлера:

Якщо ця нерівність не задовольняється, то слід збільшити натяг або проклеїти зовнішню поверхню барабана прогумованою стрічкою, тобто підвищити значення коефіцієнта тертя f .
Стрічка повинна задовольняти вимогам міцності
 ,
,
де n – коефіцієнт запасу,що приймається в межах 9 до 10;
B – ширина стрічки в см;
z - кількість прокладок в стрічці;
Кразр – граничне навантаження, приймається по табл..8.
В ланцюгових елеваторах ланцюг підбирають по таблицям стандарту виходячи з величини навантаження, що руйнується, яка визначається по формулі (131). Перевірка ланцюга на міцність виконується з врахуванням динамічного навантаження по формулі (139). Після розрахунку стрічки або ланцюгів уточнюють попередній розрахунок і визначають натяг в гілках біля натяжного барабана:


де W1 – опір навантаження, що визначається за формулою.
Розрахунок натяжного пристрою необхідно вести по суммі сил S0+S0/, а розрахунок приводного валу – по суммі сил Sнб+Sсб з врахуванням крутного моменту.
При розрахунку останова крутячий момент визначають так як і для стрічкових конвеєрів.
Натяг в холостій гілці елеватора, що нахилений (фіг.109,б) визначають виходячи з теорії провисання гнучкої нити.
Використовуючи формулу (31) і приймаючи для холостої гілки fmax=(0,15÷0,18)L, визначимо S:

Використовуючи рівняння (22), визначаємо:
 ;
;
 ;
;
 .
.
Для холостої гілки погонна маса вантажу qг=0.
Натяг в холостій гілці
 ;
;
 ;
;
Натяг в робочій гілці
 ;
;

W2 – визначається за рівнянням.
Потім за рівнянням перевіряють, чи достатнє зачеплення стрічки з барабаном, а також за рівнянням перевіряють міцність стрічки.
Якщо тяговий орган ланцюговий, ланцюг підбирають по таблицям стандарту і перевіряють на міцність з врахуванням динамічного навантаження. Потужність двигуна потрібно визначати за формулою.
Приклад. Визначити основні параметри стрічкового ковшового вертикального елеватора для переміщення пшениці. Вихідні дані:
Продуктивність…………………………………………Q=20т/ч
Висота підйому вантажу………………………………Н=8м
Приймаємо: об’ємну масу вантажу γ=0,7 т/м3 (табл.1); коефіцієнт внутрішнього тертя
 (табл. 13); кут внутрішнього тертя
(табл. 13); кут внутрішнього тертя
 ;
швидкість руху стрічки v=1,65м/сек
і коефіцієнт наповнення ковша ψ=0,7
(табл.33).
;
швидкість руху стрічки v=1,65м/сек
і коефіцієнт наповнення ковша ψ=0,7
(табл.33).Припустимо, що навантаження буде центробіжним, визначимо за формулою діаметр барабана:

Приймаємо
 =500м.
=500м.
Кількість обертів барабана

Полюсна відстань (179)

Полюсна відстань менше радіуса барабана, а тому вивантажування буде центробіжним. Відношення полюсної відстані до радіуса барабана

Це відношення знаходиться в межах величини (0,9-1), що рекомендуються, а тому вибрані параметри ДОПУСТИМІ.
Вибираємо глибокий ківш по ГОСТ4592-55 (табл..30): ємкість ковша i=1,5л, висота задньої стінки h=150мм, висота зовнішньої кромки ковша h1=75мм, висота до лінії центрів отворів для болтів h2=40мм, кут зачерпування β=420, виліт ковша А=125мм, радіус заокруглення днища ковша R=40мм.
Відстань між ковшем (219)

Такий крок можна прийняти, так як S повинно бути більше h.
Кут α1 (фіг.104):

 5020/;
5020/;

Радіус кола, що проходить через зовнішні кромки ковшів:

Розміщення плоскості зрушення на початку вивантажування ковша, тобто при φ0=450, за формулою (198):

ε0=36020/;
 ;
ρ/=43010/;
;
ρ/=43010/;
 .
.
Збудувавши розташування ковша при φ0=45, визначимо степінь його заповнення. За кресленням виходить, що величина ψ=0,55, а тому перераховуємо величину кроку ковшів:

Таку величину кроку можна допустить, так як вона більше висоти задньої стінки.
Швидкість переносного (обертального) і відносного рухів частин вантажу



 .
.
Знаходимо графічно абсолютну швидкість частинок вантажу в момент його вильоту з ковша на початку вивантажування і будуємо траєкторію польоту частинок вантажу:

З креслення виходить, що v=2,6м/сек.
Визначимо кут φ1 в тому положенні ковша, при якому плоскість зрушення співпадає з зовнішньою стінкою ковша, тобто при α=α1:

звідки
 ,
,
де


 ;
;
 ;
;
 ;
;
 .
.
Швидкість відносного руху частин вантажу при α=α1 і φ=φ1 :
 ;
;
 =
=
 .
.
Визначаємо графічно абсолютну швидкість частинок вантажу, що відривається від зовнішньої кромки ковша, в даному миттєвому його положенні і будуємо траєкторію польоту частин вантажу:

З креслення випливає, що v1=2,7м /сек.
Визначаємо доповнений до φ1 кут γ, при якому остання частина вантажу (по послідовності відриву з зовнішньої кромки) вилітає з ковша (200);

де за формулою (199)


Визначимо швидкість відносного руху останньої частинки вантажу при вильоті її з ковша:
 )
)
Приймаємо коефіцієнт тертя пшениці по сталі f=0,37. При цьому кут тертя ρ=20020/.


Визначимо графічно абсолютну швидкість останньої частинки вантажу траєкторію її польоту:

З креслення випливає, що vк= 3,8м/сек.
Визначимо опір завантаження, предполагая, що вантаж зачерпуємо з башмака. Приймаємо Аs=4,5 (абл...34) за формулою (222):

Опір переміщення стрічки за формулою (223) при с0=1,3

Сила, що рухається за формулою (224)

 .
.
Натяг на гілках стрічки:
в збігаючій з приводного барабана гілки по формулі (227)

в набігаючій на приводний барабан гілки (228)

Перевіримо можливість передачі сили тяги за рахунок зчеплення стрічки з приводним барабаном за формулою (229):

Допускаємо, що кут обхвату рівний 1800, тобто 3,14 рад:
 ;
2,72>1,6.
;
2,72>1,6.
Визначимо фактичну погонну масу тягового органу. Стрічка вибрана по табл..7:
B=175мм; z=4; ткань Б-820; kрозр=55кГ/см.
б=1,25z+0,25(z-1)+2
Маса одного погонного метру стрічки:
qл=0,01 =2кГ.
=2кГ.
Маса
ковшів, що приходять на один метр,
 .
.
Погонна
маса робочого органу
 .
.
Натяг в гілках нижнього барабану за формулами (231) і (232):


Перевіримо стрічку на міцність за формулою (230):


Міцність на валу приводного барабану за формулою (63)

Міцність на валу двигуна за формулою (64)

Приймаємо двигун N=2,8квт; n∂=1420об/хв
Визначимо передаточне число трансмісії:
