

7 Инструкция по эксплуатации контроллера
Для начала работы необходимо открыть в среде Proteus файл дизайна interf.DSN. Перед запуском, необходимо задать значения частот для генераторов частоты Sensor1, Sensor2 и Sensor3, которые заменяют собой датчики (см. рисунок 11). По умолчанию задано значение 100Гц.
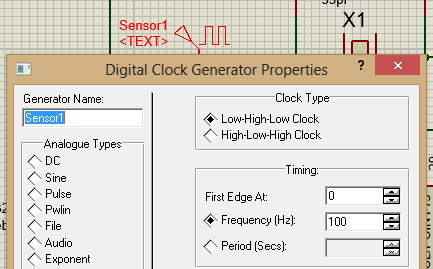
Рисунок 11 – Задание частоты сигнала датчика
Для запуска системы необходимо начать симуляцию, нажав на кнопку «Execute», расположенную в левом нижнем углу окна (см. рисунок 12), либо в меню Debug.
![]()
Рисунок 12 – Панель управления симуляцией
Через некоторое время после запуска, в случае если показания датчиков, полученные от ведомых устройств, будут отличаться более чем на 1%, включится красный светодиод (см. рисунок 13). В обратном случае будет включен зеленый светодиод (см. рисунок 14).
Во время симуляции можно приостановить работу систему и просмотреть значения, собранные с ведомых устройств, хранящиеся в памяти ведущего устройства. Для этого нужно в меню Debug выбрать подпункт AVR, соответствующий ведущему ОМК и открыть окно Variables (см. рисунок 15).
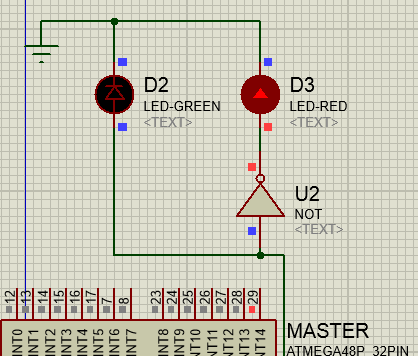
Рисунок 13 – Индикация в случае обнаружения утечки
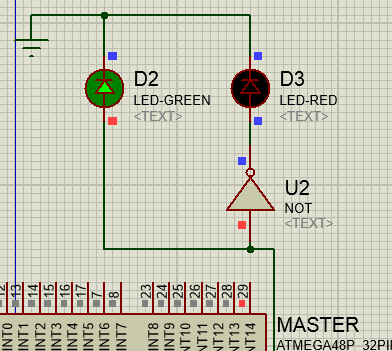
Рисунок 14 – Индикация в случае отсутствия утечек
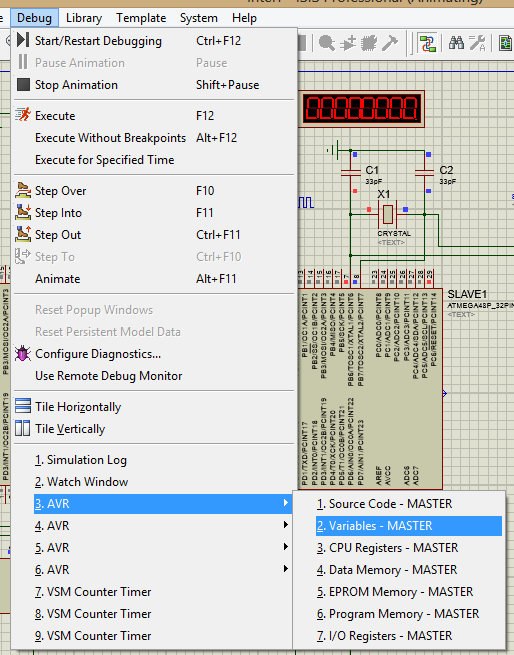
Рисунок 15 – Открытие окна Variables
На рисунке 16 представлено окно AVR Variables, которое содержит таблицу переменных, используемых контроллером, и их значений, в том числе и массив data, хранящий результаты измерений.
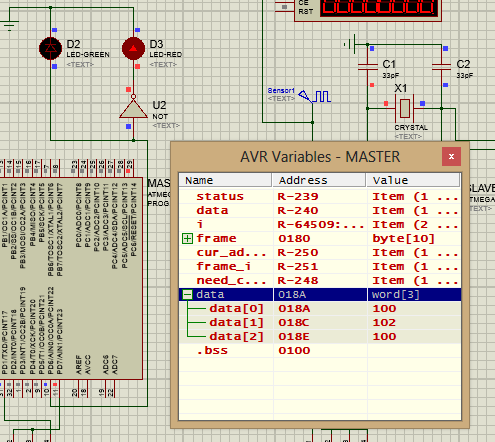
Рисунок 16 – Результат работы системы
Заключение
В ходе выполнения курсового проекта был разработан алгоритм работы, структура и принципиальная схема системы, обнаруживающей утечки в трубопроводе. Система считывает показания датчиков объемного расхода, и при отклонении значений на соседних участках более чем на 1% сообщает об этом.
Программа была написана на языке программирования Си, с помощью среды программирования CodeVision AVR и отлажена в Proteus 7.10 Professional.
Откомпилированный код выходного файла для ведущего контроллера занимает объем 2056 байт, для ведомых – 2156 байт.
Время выполнения:
подпрограмма обработки входящего кадра данных и обнаружения утечек (ведущий ОМК) – менее 5мс;
подпрограмма измерения частоты – менее 1 мс.
Список использованных источников
Иоффе, В. Г. Структурная организация однокристальных микроконтро-ллеров [Текст]/ В. Г. Иоффе. – Самара: Издательство СГАУ, 2011. – 65с.
Иоффе, В. Г. Методические указания к курсовому проектированию по дисциплине «Микропроцессорные средства систем автоматизации» [Текст]/ В. Г. Иоффе. – Самара: Издательство СГАУ, 2012. – 21с.
ATmega48P/88P/168P Datasheet [Электронный ресурс]. – www.atmel.com/Images/doc8025.pdf.
MAX1487, MAX481, MAX483, MAX485, MAX487, MAX488, MAX489, MAX490, MAX491 Low-Power, Slew-Rate-Limited RS-485/RS-422 Transceivers [Электронный ресурс]. – http://datasheets.maximintegrated.com/en/ds/MAX1487-MAX491.pdf
Гречишников В.М. Метрология и радиоизмерения: Учебное пособие / В.М. Гречишников. – Самара: Издательство СГАУ, 2007. – 160 с.
Приложение а
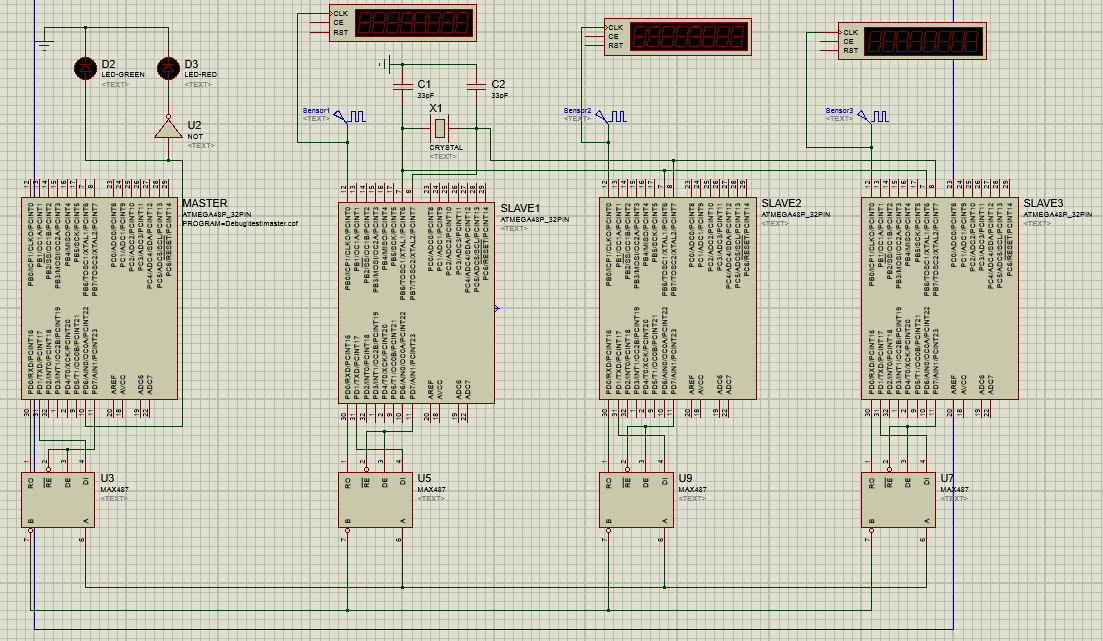 Рисунок
17 – Принципиальная схема
Рисунок
17 – Принципиальная схема